В данной работе приведен результат математического моделирования синхронного явнополюсного дугостаторного двигателя (СЯДД) с помощью магнитных и электрических схем замещения [1]. В пазах индуктора (Z1 = 12) расположены две классические трехфазные обмотки с общим нулевым проводом. Всё пространство ротора разбито на 18 частей, соответствующих зубцовому делению индуктора, как показано на рис. 2. Ширина полюса в данной работе принята равной ширине междуполюсного пространства с обмотками постоянного тока.
Так как работа адресована студентам, то для лучшего овладения материалом выводы математических формул даны без сокращений.
Запишем основные уравнения для «n»-ого участка схемы замещения.
Баланс магнитных напряжений магнитной цепи
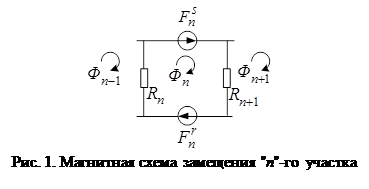
 – контурные магнитные потоки;
– контурные магнитные потоки;
 – магнитные сопротивления воздушных участков;
– магнитные сопротивления воздушных участков;
 – магнитодвижущая сила, созданная статорным током
– магнитодвижущая сила, созданная статорным током  , протекающим по всем проводникам паза (
, протекающим по всем проводникам паза ( );
);
 – М.Д.С. тока в обмотке ротора;
– М.Д.С. тока в обмотке ротора;
 – в шунтирующих зонах.
– в шунтирующих зонах.
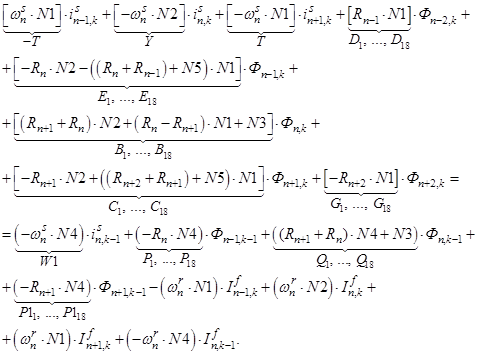
Баланс М.Д.С. для «n»-го участка имеет следующий вид:

где 

Ток  условно назовем асинхронной составляющей полного тока в роторной обмотке. Этот ток создается от Э.Д.С. трансформации, Э.Д.С. движения, от изменяющегося потока во времени или от движущего потока в пространстве. При построении обобщенной математической модели двигателей, исключая вторую составляющую М.Д.С.
условно назовем асинхронной составляющей полного тока в роторной обмотке. Этот ток создается от Э.Д.С. трансформации, Э.Д.С. движения, от изменяющегося потока во времени или от движущего потока в пространстве. При построении обобщенной математической модели двигателей, исключая вторую составляющую М.Д.С.  с помощью соответствующих ключей, можно перейти к линейным (дугостаторным) асинхронным двигателям [4], [5], …, [9].
с помощью соответствующих ключей, можно перейти к линейным (дугостаторным) асинхронным двигателям [4], [5], …, [9].
Вторая составляющая М.Д.С. (условно назовем синхронная составляющая  представляет собой бегущую в пространстве ступенчатую фигуру в соответствии с дискретным расположением роторной обмотки.
представляет собой бегущую в пространстве ступенчатую фигуру в соответствии с дискретным расположением роторной обмотки.
В данной работе синхронную составляющую выразим 1-й гармоникой бегущей волны:

где  - полюсное деление;
- полюсное деление;

 - линейная скорость на внешнем диаметре ротора.
- линейная скорость на внешнем диаметре ротора.
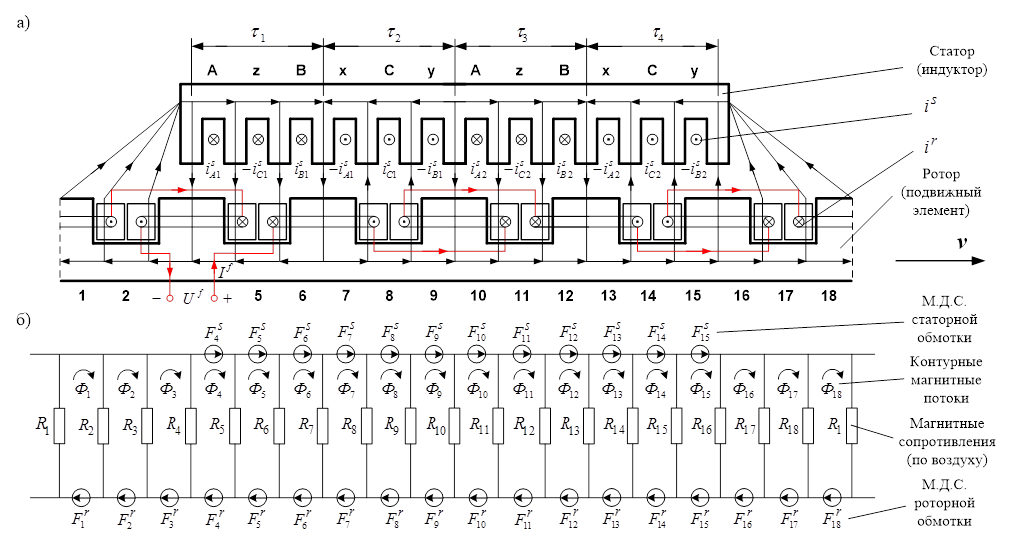 Рис. 2. а) Синхронный явнополюсный дугостаторный двигатель (2р = 4, Z1 = 12); б) Магнитная схема замещения
Рис. 2. а) Синхронный явнополюсный дугостаторный двигатель (2р = 4, Z1 = 12); б) Магнитная схема замещения
Отсюда асинхронная составляющая тока в обмотке ротора определится по следующему выражению:
 . (1)
. (1)
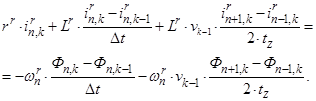
Уравнение баланса напряжений электрической цепи ротора для асинхронной составляющей тока ротора
 (2)
(2)
Выразим производные во времени через конечные разности:
 ,
,
где n – номер зубцового деления;
k – номер шага разбиения по времени.
В формуле (2) линейную скорость ротора принимаем равной  и в пределах «k» интервала считается постоянным.
и в пределах «k» интервала считается постоянным.
Производные по пространственной координате «х» выразим через центральные конечные разности:
 .
.
С учетом вышеприведенных замечаний уравнение (2) примет следующий вид:
 (3)
(3)
Исключим из уравнения (3) асинхронную составляющую тока в роторе. Для этого подставим выражение (1) в уравнение (3) и получим:
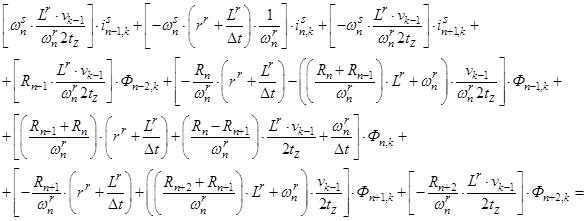
 (4)
(4)
Это уравнение может быть реализовано при произведении матрицы А, элементы которой записаны в квадратных скобках, на матрицу-столбец X, состоящей из потоков (Ф) и токов статорной обмотки. Правая часть уравнения (4) формирует первые восемнадцать элементов матрицы-столбца свободных членов S в (k-1) момент времени. Элементы  строк матрицы А и соответствующие элементы
строк матрицы А и соответствующие элементы  будут сформированы из баланса напряжений статорной обмотки.
будут сформированы из баланса напряжений статорной обмотки.
Наконец, последние элементы матриц А и S определятся из баланса токов в трехфазной обмотке соединенной в звезду с нулевым проводом. Матрица-столбец Х сформирована из первых восемнадцати элементов, соответствующих потокам  а остальные – токам статорной обмотки iА1s, iС1s, iВ1s, iА2s, iС2s, iВ2s и i0s.
а остальные – токам статорной обмотки iА1s, iС1s, iВ1s, iА2s, iС2s, iВ2s и i0s.
Общий вид матриц при числе полюсов 2р = 4 и общем числе пазов индуктора (статора) Z1 = 12 приведен на рис. 3.
Введем следующие обозначения:




- Магнитные сопротивления в шунтирующих зонах:
R1 = 500∙Rδ;
R2 = R18 = 50∙Rδ;
R3 = R17 = 5∙Rδ.
- Магнитные сопротивления в индукторной зоне:

- Элементы матрицы А, перемножаемые на потоки матрицы-столбца Х:



- Элементы матрицы А, перемножаемые на токи матрицы Х:

- Элементы матрицы-столбца свободных членов S:
С учетом вышеприведенных обозначений (N1, N2, …, N5, T, Y, W1, P, P1, Q) уравнение 4 приобретет следующий вид:
 (4’)
(4’)
После подстановки в (4’) выражений (T, Y, Dn, En, Bn, Cn, Gn) получаем простое выражение удобное для программирования:
 (4”)
(4”)
Линейная токовая нагрузка в роторной обмотке в k и k-1 моменты времени:


Уравнение (4) позволит определить для первых восемнадцати строк элементы матрицы А и с первый по восемнадцатый элементы матрицы-столбца S, для этого последовательно зададимся n:
n = 1.


Запишем элементы матрицы А:
 ;
;  ;
;  ;
;  ;
; 
В правой части сформирован элемент  матрицы-столбца S:
матрицы-столбца S:

Примечание: вначале матрица А предстанет «пустой» и после каждой операции  определятся постепенно элементы для каждой строки и только в конце всех операций матрица А предстанет перед читателем в том виде как она дана на рис. 3. Но эта «пустая» матрица А уже должна быть подготовлена. Эта «пустая» форма направляет, выступает «организующим началом» по поиску элементов в каждой строке.
определятся постепенно элементы для каждой строки и только в конце всех операций матрица А предстанет перед читателем в том виде как она дана на рис. 3. Но эта «пустая» матрица А уже должна быть подготовлена. Эта «пустая» форма направляет, выступает «организующим началом» по поиску элементов в каждой строке.
При n = 1, как было показано выше, определились элементы первой строки. Найденные коэффициенты вписываем в матрицу А. В дальнейшем становится понятным алгоритм заполнения матрицы.
n = 2.


 ;
;  ;
;  ;
;  ;
; 

n = 3.


 ;
;  ;
;  ;
;  ;
; 


Примечание: при подстановке в уравнение (4) n = 4, мы увидим в соответствии с рис. 2, что войдет ток iС1S с отрицательным знаком, в то же время в матрице-столбце Х нет знака «–» , поэтому его необходимо учесть в соответствующем элементе матрицы А.
Аналогично для других фаз, в концах обмоток x, y, z условно принимаем знак «–» и этот знак вводим в соответствующие элементы матрицы А.
n = 4.


 ;
;  ;
;  ;
;  ;
;  ;
;  ;
; 

n = 5.


 ;
;  ;
;  ;
;  ;
;  ;
;  ;
;
 ;
; 

|
Матрица А |
Х |
|
S | ||||||||||||||||||||||||||
|
|
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
11 |
12 |
13 |
14 |
15 |
16 |
17 |
18 |
19 |
20 |
21 |
22 |
23 |
24 |
25 |
|
|
|
|
|
1 |
a1,1 |
a1,2 |
a1,3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
a1,17 |
a1,18 |
|
|
|
|
|
|
|
× |
x1 = Ф1 |
= |
s1 |
|
2 |
a2,1 |
a2,2 |
a2,3 |
a2,4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
a2,18 |
|
|
|
|
|
|
|
x2 = Ф2 |
s2 | ||
|
3 |
a3,1 |
a3,2 |
a3,3 |
a3,4 |
a3,5 |
|
|
|
|
|
|
|
|
|
|
|
|
|
a3,19 |
|
|
|
|
|
|
x3 = Ф3 |
s3 | ||
|
4 |
|
a4,2 |
a4,3 |
a4,4 |
a4,5 |
a4,6 |
|
|
|
|
|
|
|
|
|
|
|
|
a4,19 |
a4,20 |
|
|
|
|
|
x4 = Ф4 |
s4 | ||
|
5 |
|
|
a5,3 |
a5,4 |
a5,5 |
a5,6 |
a5,7 |
|
|
|
|
|
|
|
|
|
|
|
a5,19 |
a5,20 |
a5,21 |
|
|
|
|
x5 = Ф5 |
s5 | ||
|
6 |
|
|
|
a6,4 |
a6,5 |
a6,6 |
a6,7 |
a6,8 |
|
|
|
|
|
|
|
|
|
|
a6,19 |
a6,20 |
a6,21 |
|
|
|
|
x6 = Ф6 |
s6 | ||
|
7 |
|
|
|
|
a7,5 |
a7,6 |
a7,7 |
a7,8 |
a7,9 |
|
|
|
|
|
|
|
|
|
a7,19 |
a7,20 |
a7,21 |
|
|
|
|
x7 = Ф7 |
s7 | ||
|
8 |
|
|
|
|
|
a8,6 |
a8,7 |
a8,8 |
a8,9 |
a8,10 |
|
|
|
|
|
|
|
|
a8,19 |
a8,20 |
a8,21 |
|
|
|
|
x8 = Ф8 |
s8 | ||
|
9 |
|
|
|
|
|
|
a9,7 |
a9,8 |
a9,9 |
a9,10 |
a9,11 |
|
|
|
|
|
|
|
|
a9,20 |
a9,21 |
a9,22 |
|
|
|
x9 = Ф9 |
s9 | ||
|
10 |
|
|
|
|
|
|
|
a10,8 |
a10,9 |
a10,10 |
a10,11 |
a10,12 |
|
|
|
|
|
|
|
|
a10,21 |
a10,22 |
a10,23 |
|
|
x10 = Ф10 |
s10 | ||
|
11 |
|
|
|
|
|
|
|
|
a11,9 |
a11,10 |
a11,11 |
a11,12 |
a11,13 |
|
|
|
|
|
|
|
|
a11,22 |
a11,23 |
a11,24 |
|
x11 = Ф11 |
s11 | ||
|
12 |
|
|
|
|
|
|
|
|
|
a12,10 |
a12,11 |
a12,12 |
a12,13 |
a12,14 |
|
|
|
|
|
|
|
a12,22 |
a12,23 |
a12,24 |
|
x12 = Ф12 |
s12 | ||
|
13 |
|
|
|
|
|
|
|
|
|
|
a13,11 |
a13,12 |
a13,13 |
a13,14 |
a13,15 |
|
|
|
|
|
|
a13,22 |
a13,23 |
a13,24 |
|
x13 = Ф13 |
s13 | ||
|
14 |
|
|
|
|
|
|
|
|
|
|
|
a14,12 |
a14,13 |
a14,14 |
a14,15 |
a14,16 |
|
|
|
|
|
a14,22 |
a14,23 |
a14,24 |
|
x14 = Ф14 |
s14 | ||
|
15 |
|
|
|
|
|
|
|
|
|
|
|
|
a15,13 |
a15,14 |
a15,15 |
a15,16 |
a15,17 |
|
|
|
|
|
a15,23 |
a15,24 |
|
x15 = Ф15 |
s15 | ||
|
16 |
|
|
|
|
|
|
|
|
|
|
|
|
|
a16,14 |
a16,15 |
a16,16 |
a16,17 |
a16,18 |
|
|
|
|
|
a16,24 |
|
x16 = Ф16 |
s16 | ||
|
17 |
a17,1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
a17,15 |
a17,16 |
a17,17 |
a17,18 |
|
|
|
|
|
|
|
|
x17 = Ф17 |
|
s17 |
|
18 |
a18,1 |
a18,2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
a18,16 |
a18,17 |
a18,18 |
|
|
|
|
|
|
|
|
x18 = Ф18 |
|
s18 |
|
19 |
|
|
|
a19,4 |
|
|
a19,7 |
|
|
|
|
|
|
|
|
|
|
|
a19,19 |
|
|
|
|
|
|
|
x19 = iА1S |
|
s19 |
|
20 |
|
|
|
|
|
a20,6 |
|
|
a20,9 |
|
|
|
|
|
|
|
|
|
|
|
a20,21 |
|
|
|
|
|
x20 = iС1S |
|
s20 |
|
21 |
|
|
|
|
a21,5 |
|
|
a21,8 |
|
|
|
|
|
|
|
|
|
|
|
a21,20 |
|
|
|
|
|
|
x21 = iВ1S |
|
s21 |
|
22 |
|
|
|
|
|
|
|
|
|
a22,10 |
|
|
a22,13 |
|
|
|
|
|
|
|
|
a22,22 |
|
|
|
|
x22 = iА2S |
|
s22 |
|
23 |
|
|
|
|
|
|
|
|
|
|
|
a23,12 |
|
|
a23,15 |
|
|
|
|
|
|
|
|
a23,24 |
|
|
x23 = iС2S |
|
s23 |
|
24 |
|
|
|
|
|
|
|
|
|
|
a24,11 |
|
|
a24,14 |
|
|
|
|
|
|
|
|
a24,22 |
|
|
|
x24 = iВ2S |
|
s24 |
|
25 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
a25,19 |
a25,20 |
a25,21 |
a25,22 |
a25,23 |
a25,24 |
a25,25 |
|
x25 = i0S |
|
s25 |
Рис. 3. Общий вид матриц A, X и S.
n = 6.


 ;
;  ;
;  ;
;  ;
;  ;
;  ;
;
 ;
; 

n = 7.


 ;
;  ;
;  ;
;  ;
;  ;
;  ;
;
 ;
; 

n = 8.


 ;
;  ;
;  ;
;  ;
;  ;
;  ;
;
 ;
; 

n = 9.


 ;
;  ;
;  ;
;  ;
;  ;
;
 ;
; 


n = 10.


 ;
;  ;
;  ;
;  ;
;  ;
;




n = 11.


 ;
;  ;
;  ;
;  ;
; 




n = 12.


 ;
;  ;
;  ;
;  ;
; 




n = 13.


 ;
;  ;
;  ;
;  ;
; 




n = 14.


 ;
;  ;
;  ;
;  ;
; 




n = 15.


 ;
;  ;
;  ;
;  ;
; 



n = 16.


 ;
;  ;
;  ;
;  ;
; 


n = 17.


 ;
;  ;
;  ;
;  ;
; 

n = 18.


 ;
;  ;
;  ;
;  ;
; 

Элементы строк 19, 20, …, 24 матрицы А и соответствующие элементы матрицы-столбца S определяются из баланса электрических напряжений обмоток статора.
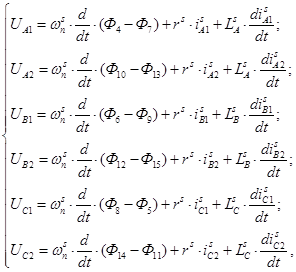 (5)
(5)
где 


 (6)
(6)


С учетом шага по времени ∆t в k-ый момент времени:
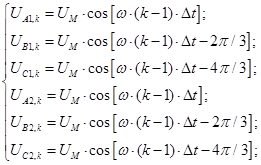 (7)
(7)
n = 19.
Выразим производные тока  , потоков
, потоков  и
и  через конечные разности:
через конечные разности:



Обозначим 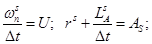

Аналогично для строк 20, 21, …, 24:
n = 20.


n = 21.


n = 22.


n = 23.


n = 24.


n = 25.
Наконец, сумма токов определяет элементы двадцать пятой строки матрицы А и элемент  матрицы-столбца S.
матрицы-столбца S.

Окончательно, матрица А примет следующий вид, удобный для программирования в MATLAB (рис. 4):
|
|
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
11 |
12 |
13 |
14 |
15 |
16 |
17 |
18 |
19 |
20 |
21 |
22 |
23 |
24 |
25 |
|
1 |
B1 |
C1 |
G1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
D1 |
E1 |
|
|
|
|
|
|
|
|
2 |
E2 |
B2 |
C2 |
G2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
D2 |
|
|
|
|
|
|
|
|
3 |
D3 |
E3 |
B3 |
C3 |
G3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
T |
|
|
|
|
|
|
|
4 |
|
D4 |
E4 |
B4 |
C4 |
G4 |
|
|
|
|
|
|
|
|
|
|
|
|
Y |
-T |
|
|
|
|
|
|
5 |
|
|
D5 |
E5 |
B5 |
C5 |
G5 |
|
|
|
|
|
|
|
|
|
|
|
-T |
-Y |
T |
|
|
|
|
|
6 |
|
|
|
D6 |
E6 |
B6 |
C6 |
G6 |
|
|
|
|
|
|
|
|
|
|
-T |
T |
Y |
|
|
|
|
|
7 |
|
|
|
|
D7 |
E7 |
B7 |
C7 |
G7 |
|
|
|
|
|
|
|
|
|
-Y |
T |
-T |
|
|
|
|
|
8 |
|
|
|
|
|
D8 |
E8 |
B8 |
C8 |
G8 |
|
|
|
|
|
|
|
|
T |
Y |
-T |
|
|
|
|
|
9 |
|
|
|
|
|
|
D9 |
E9 |
B9 |
C9 |
G9 |
|
|
|
|
|
|
|
|
-T |
-Y |
T |
|
|
|
|
10 |
|
|
|
|
|
|
|
D10 |
E10 |
B10 |
C10 |
G10 |
|
|
|
|
|
|
|
|
T |
Y |
-T |
|
|
|
11 |
|
|
|
|
|
|
|
|
D11 |
E11 |
B11 |
C11 |
G11 |
|
|
|
|
|
|
|
|
-T |
-Y |
T |
|
|
12 |
|
|
|
|
|
|
|
|
|
D12 |
E12 |
B12 |
C12 |
G12 |
|
|
|
|
|
|
|
-T |
T |
Y |
|
|
13 |
|
|
|
|
|
|
|
|
|
|
D13 |
E13 |
B13 |
C13 |
G13 |
|
|
|
|
|
|
-Y |
T |
-T |
|
|
14 |
|
|
|
|
|
|
|
|
|
|
|
D14 |
E14 |
B14 |
C14 |
G14 |
|
|
|
|
|
T |
Y |
-Y |
|
|
15 |
|
|
|
|
|
|
|
|
|
|
|
|
D15 |
E15 |
B15 |
C15 |
G15 |
|
|
|
|
|
-T |
-Y |
|
|
16 |
|
|
|
|
|
|
|
|
|
|
|
|
|
D16 |
E16 |
B16 |
C16 |
G16 |
|
|
|
|
|
T |
|
|
17 |
G17 |
|
|
|
|
|
|
|
|
|
|
|
|
|
D17 |
E17 |
B17 |
C17 |
|
|
|
|
|
|
|
|
18 |
C18 |
G18 |
|
|
|
|
|
|
|
|
|
|
|
|
|
D18 |
E18 |
B18 |
|
|
|
|
|
|
|
|
19 |
|
|
|
U |
|
|
-U |
|
|
|
|
|
|
|
|
|
|
|
AS |
|
|
|
|
|
|
|
20 |
|
|
|
|
|
U |
|
|
-U |
|
|
|
|
|
|
|
|
|
|
|
BS |
|
|
|
|
|
21 |
|
|
|
|
-U |
|
|
U |
|
|
|
|
|
|
|
|
|
|
|
CS |
|
|
|
|
|
|
22 |
|
|
|
|
|
|
|
|
|
U |
|
|
-U |
|
|
|
|
|
|
|
|
AS |
|
|
|
|
23 |
|
|
|
|
|
|
|
|
|
|
|
U |
|
|
-U |
|
|
|
|
|
|
|
|
BS |
|
|
24 |
|
|
|
|
|
|
|
|
|
|
-U |
|
|
U |
|
|
|
|
|
|
|
|
CS |
|
|
|
25 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
1 |
1 |
1 |
1 |
1 |
-1 |
Рис. 4
Неизвестные переменные (потоки и токи в статорной обмотке) в k-й момент времени определяются в результате следующей операции с матрицами:
X=A-1·S,
Далее, подставляя в уравнение (1) n = 1…18, определяем суммарные токи (М.Д.С.) в роторе:



















Электромагнитные усилия на зубцовом делении определяются по следующим формулам:
Суммарное усилие:  .
.
Линейная скорость ротора в k-й момент времени: 
Математическая модель синхронного неявнополюсного дугостаторного двигателя реализована в программном пакете MATLAB методом Гаусса-Жордана. Ниже приведен пример расчета.
% Математическая модель СЯДД с укладкой статорной обмотки классическим
% способом (z=12) с нулевым проводом
% function SD_z12_zero
% Исходные данные синхронного двигателя
Rb=0.1003*10^7;
rs=7.41;
LsA=0.222;
LsB=0.228;
LsC=0.21;
rr=27;
Lr=0.074;
dt=0.001;
As=rs+LsA/dt;
Bs=rs+LsB/dt;
Cs=rs+LsC/dt;
tz=9.769*10^-3;
tau=3*tz;
m=95;
v0=0;
wns=200;
wnr=2000;
UA=wns/dt;
X=zeros(25,1);
F=0;
w12=2;
mass_Um=0;
mass_f=0;
mass_t=0;
Ukon=500;
Unach=8;
tk=8;
K=input('Длительность цикла k=');
for k=1:(K+1)
if ((k*dt >= 0) && (k*dt <= tk))
fc=k*dt*40/tk;
vs=2*tau*fc;
w=2*pi*vs/(2*tau);
eps=0.1;
if (vs-v0)>eps
wR=2*pi*v0/(2*tau);
else
ss=0;
wR=w;
end;
Um=Unach+((Ukon-Unach)*(k*dt)^1)/((tk)^1);
end;
if (k*dt > tk)
fc=40+2*((tanh(k*dt-1)^0.6))*0;
vs=2*tau*fc;
w=2*pi*vs/(2*tau);
eps=0.1;
if (vs-v0)>eps
wR=2*pi*v0/(2*tau);
else
ss=0;
wR=w;
end;
Um=Ukon+10*((tanh(k*dt-1)^0.6))*0;
end;
if ((k*dt >= 0) && (k*dt <= 4))
Fc=2;
end;
if (k*dt > 4)
Fc=10;
end;
if ((k*dt >= 0) && (k*dt <= 1.5))
Ufm=k*dt*2/1.5;
Ifm=Ufm/rr;
end;
if (k*dt > 1.5)
Ufm=2;
Ifm=Ufm/rr;
end;
if (k*dt > 8)
Ufm=10;
Ifm=Ufm/rr;
end;
v(1,k)=v0; %Создание вектор-строки для графика скорости
f(1,k)=sum(F)-Fc; %Создание вектор-строки для графика усилия
Ua1=Um*cos(w*(k-1)*dt);
Ub1=Um*cos(w*(k-1)*dt-2*pi/3);
Uc1=Um*cos(w*(k-1)*dt-4*pi/3);
Ua2=Um*cos(w*(k-1)*dt);
Ub2=Um*cos(w*(k-1)*dt-2*pi/3);
Uc2=Um*cos(w*(k-1)*dt-4*pi/3);
i0(1,k)=X(25);
i_a1(1,k)=X(19);
i_b1(1,k)=X(20);
i_c1(1,k)=X(21);
i_a2(1,k)=X(22);
i_b2(1,k)=X(23);
i_c2(1,k)=X(24);
% Формирование матрицы A
A=zeros(25);
N1=Lr*v0/(wnr*2*tz);
N2=(rr+Lr/dt)/wnr;
N3=wnr/dt;
N4=Lr/(wnr*dt);
N5=(wnr^2)/Lr;
R(1)=500*Rb;
R(2)=50*Rb;
R(3)=5*Rb;
for n=4:16
R(n)=1.2*Rb-0.2*Rb*cos(wR*k*dt+(2*pi*tz*n)/tau-w12*pi/12);
end;
R(17)=5*Rb;
R(18)=50*Rb;
R(19)=500*Rb;
R(20)=50*Rb;
A(18,18)=(R(18)+R(1))*N2+N1*(R(18)-R(1))+N3; %B
for n=1:17
A(n,n)=(R(n)+R(n+1))*N2+N1*(R(n)-R(n+1))+N3; %B
end;
A(1,18)=-R(1)*N2-N1*(R(18)+R(1)+N5); %E
for n=2:18
A(n,n-1)=-R(n)*N2-N1*(R(n-1)+R(n)+N5); %E
end;
A(17,18)=-R(18)*N2+N1*(R(18)+R(1)+N5); %C
A(18,1)=-R(1)*N2+N1*(R(1)+R(2)+N5); %C
for n=1:16
A(n,n+1)=-R(n+1)*N2+N1*(R(n+1)+R(n+2)+N5); %C
end;
A(1,17)=R(18)*N1; %D
A(2,18)=R(1)*N1; %D
for n=3:18
A(n,n-2)=R(n-1)*N1;% D
end;
A(17,1)=-R(1)*N1; %G
A(18,2)=-R(2)*N1; %G
for n=1:16
A(n,n+2)=-R(n+2)*N1; %G
end;
W1=-wns*N4;
T=-wns*N1;
Y=-wns*N2;
for n=1:18
If(n)=Ifm*sin(wR*k*dt+(pi/3)*(n-0.5)-w12*pi/12);
If1(n)=Ifm*sin(wR*(k-1)*dt+(pi/3)*(n-0.5)-w12*pi/12);
end;
for n=1:3
A(n+2,n+18)=(-1)^(n+1)*T;
A(n+3,n+18)=(-1)^(n+1)*Y;
A(n+4,n+18)=(-1)^n*T;
A(n+5,n+18)=(-1)^n*T;
A(n+6,n+18)=(-1)^n*Y;
A(n+7,n+18)=(-1)^(n+1)*T;
A(n+8,n+21)=(-1)^(n+1)*T;
A(n+9,n+21)=(-1)^(n+1)*Y;
A(n+10,n+21)=(-1)^n*T;
A(n+11,n+21)=(-1)^n*T;
A(n+12,n+21)=(-1)^n*Y;
A(n+13,n+21)=(-1)^(n+1)*T;
end;
for n=1:6
A(25,n+18)=1;%hh
end;
A(25,25)=-1;%jgj
for n=2:7
A(n+17,n*2)=UA;
end;
for n=2:3
A(n+17,n*2+3)=-UA;
A(n+20,n*2+9)=-UA;
A(n*3+15,n^2+n-1)=-UA;
A(n*3+13,n*3+13)=As;
A(n*3+14,n*3+15)=Bs;
A(n*3+15,n*3+14)=Cs;
end;
% Матрица свободных членов
S=[ ((R(1)+R(2))*N4+N3)*X(1)-N4*(R(1)*X(18)+R(2)*X(2))-
N1*wnr*If(18)+N2*wnr*If(1)+N1*wnr*If(2)-N4*wnr*If1(1); %1
((R(2)+R(3))*N4+N3)*X(2)-N4*(R(2)*X(1)+R(3)*X(3))-N1*wnr*If(1)+N2*wnr*If(2)+N1*wnr*If(3)-N4*wnr*If1(2); %2
((R(3)+R(4))*N4+N3)*X(3)-N4*(R(3)*X(2)+R(4)*X(4))-N1*wnr*If(2)+N2*wnr*If(3)+N1*wnr*If(4)-N4*wnr*If1(3); %3
W1*X(19)+((R(4)+R(5))*N4+N3)*X(4)-N4*(R(4)*X(3)+R(5)*X(5))-N1*wnr*If(3)+N2*wnr*If(4)+N1*wnr*If(5)-N4*wnr*If1(4); %4
(-1)*W1*X(20)+((R(5)+R(6))*N4+N3)*X(5)-N4*(R(5)*X(4)+R(6)*X(6))-N1*wnr*If(4)+N2*wnr*If(5)+N1*wnr*If(6)-N4*wnr*If1(5); %5
W1*X(21)+((R(6)+R(7))*N4+N3)*X(6)-N4*(R(6)*X(5)+R(7)*X(7))-N1*wnr*If(5)+N2*wnr*If(6)+N1*wnr*If(7)-N4*wnr*If1(6); %6
(-1)*W1*X(19)+((R(7)+R(8))*N4+N3)*X(7)-N4*(R(7)*X(6)+R(8)*X(8))-N1*wnr*If(6)+N2*wnr*If(7)+N1*wnr*If(8)-N4*wnr*If1(7); %7
W1*X(20)+((R(8)+R(9))*N4+N3)*X(8)-N4*(R(8)*X(7)+R(9)*X(9))-N1*wnr*If(7)+N2*wnr*If(8)+N1*wnr*If(9)-N4*wnr*If1(8); %8
(-1)*W1*X(21)+((R(9)+R(10))*N4+N3)*X(9)-N4*(R(9)*X(8)+R(10)*X(10))-N1*wnr*If(8)+N2*wnr*If(9)+N1*wnr*If(10)-N4*wnr*If1(9); %9
W1*X(22)+((R(10)+R(11))*N4+N3)*X(10)-N4*(R(10)*X(9)+R(11)*X(11))-N1*wnr*If(9)+N2*wnr*If(10)+N1*wnr*If(11)-N4*wnr*If1(10); %10
(-1)*W1*X(23)+((R(11)+R(12))*N4+N3)*X(11)-N4*(R(11)*X(10)+R(12)*X(12))-N1*wnr*If(10)+N2*wnr*If(11)+N1*wnr*If(12)-N4*wnr*If1(11); %11
W1*X(24)+((R(12)+R(13))*N4+N3)*X(12)-N4*(R(12)*X(11)+R(13)*X(13))-N1*wnr*If(11)+N2*wnr*If(12)+N1*wnr*If(13)-N4*wnr*If1(12); %12
(-1)*W1*X(22)+((R(13)+R(14))*N4+N3)*X(13)-N4*(R(13)*X(12)+R(14)*X(14))-N1*wnr*If(12)+N2*wnr*If(13)+N1*wnr*If(14)-N4*wnr*If1(13); %13
W1*X(23)+((R(14)+R(15))*N4+N3)*X(14)-N4*(R(14)*X(13)+R(15)*X(15))-N1*wnr*If(13)+N2*wnr*If(14)+N1*wnr*If(15)-N4*wnr*If1(14); %14
(-1)*W1*X(24)+((R(15)+R(16))*N4+N3)*X(15)-N4*(R(15)*X(14)+R(16)*X(16))-N1*wnr*If(14)+N2*wnr*If(15)+N1*wnr*If(16)-N4*wnr*If1(15); %15
((R(16)+R(17))*N4+N3)*X(16)-N4*(R(16)*X(15)+R(17)*X(17))-N1*wnr*If(15)+N2*wnr*If(16)+N1*wnr*If(17)-N4*wnr*If1(16); %16
((R(17)+R(18))*N4+N3)*X(17)-N4*(R(17)*X(16)+R(18)*X(18))-N1*wnr*If(16)+N2*wnr*If(17)+N1*wnr*If(18)-N4*wnr*If1(17); %17
((R(18)+R(1))*N4+N3)*X(18)-N4*(R(18)*X(17)+R(1)*X(1))-N1*wnr*If(17)+N2*wnr*If(18)+N1*wnr*If(1)-N4*wnr*If1(18); %18
UA*(X(4)-X(7))+(LsA/dt)*X(19)+Ua1; %19
UA*(X(6)-X(9))+(LsB/dt)*X(21)+Ub1; %20
UA*(X(8)-X(5))+(LsC/dt)*X(20)+Uc1; %21
UA*(X(10)-X(13))+(LsA/dt)*X(22)+Ua2; %22
UA*(X(12)-X(15))+(LsB/dt)*X(24)+Ub2; %23
UA*(X(14)-X(11))+(LsC/dt)*X(23)+Uc2; %24
0]; %25
% Решение методом Гаусса-Жордана
Z=rref([A S]); %Приведение расширенной матрицы к треугольному виду
X=Z(1:25,26:26); %Выделение последнего столбца из матрицы
% Ток в роторе
IR=[ (R(1)+R(2))*X(1)-R(2)*X(2)-R(1)*X(18); %1
(R(2)+R(3))*X(2)-R(3)*X(3)-R(2)*X(1); %2
(R(3)+R(4))*X(3)-R(4)*X(4)-R(3)*X(2); %3
-wns*X(19)+(R(4)+R(5))*X(4)-R(5)*X(5)-R(4)*X(3); %4
wns*X(20)+(R(5)+R(6))*X(5)-R(6)*X(6)-R(5)*X(4); %5
-wns*X(21)+(R(6)+R(7))*X(6)-R(7)*X(7)-R(6)*X(5); %6
wns*X(19)+(R(7)+R(8))*X(7)-R(8)*X(8)-R(7)*X(6); %7
-wns*X(20)+(R(8)+R(9))*X(8)-R(9)*X(9)-R(8)*X(7); %8
wns*X(21)+(R(9)+R(10))*X(9)-R(10)*X(10)-R(9)*X(8); %9
-wns*X(22)+(R(10)+R(11))*X(10)-R(11)*X(11)-R(10)*X(9); %10
wns*X(23)+(R(11)+R(12))*X(11)-R(12)*X(12)-R(11)*X(10); %11
-wns*X(24)+(R(12)+R(13))*X(12)-R(13)*X(13)-R(12)*X(11); %12
wns*X(22)+(R(13)+R(14))*X(13)-R(14)*X(14)-R(13)*X(12); %13
-wns*X(23)+(R(14)+R(15))*X(14)-R(15)*X(15)-R(14)*X(13); %14
wns*X(24)+(R(15)+R(16))*X(15)-R(16)*X(16)-R(15)*X(14); %15
(R(16)+R(17))*X(16)-R(17)*X(17)-R(16)*X(15); %16
(R(17)+R(18))*X(17)-R(18)*X(18)-R(17)*X(16); %17
(R(18)+R(1))*X(18)-R(1)*X(1)-R(18)*X(17)]; %18
% Электромагнитное усилие
F(1)=(X(2)-X(18))*(IR(1))/(2*tz);
for n=1:16
F(n+1)=(X(n+2)-X(n))*(IR(n+1))/(2*tz);
end;
F(18)=(X(1)-X(17))*(IR(18))/(2*tz);
% Скорость
v0=v0+((sum(F)-Fc)/m)*dt;
mass_Um(k)=Um;
mass_fc(k)=fc;
mass_t(k)=k*dt;
end;
% Построение графиков
figure(1);
plot(mass_t,mass_Um,'r',mass_t,mass_fc,'b');
grid on;
axis([0 5 0 250]);
figure(2);
k=0:K;
subplot(2,1,1);
plot(k*dt,v);
title('Скорость');
xlabel('t,с');
ylabel('v,м/с');
grid on;
subplot(2,1,2);
plot(k*dt,f);
title('Сила');
xlabel('t,с');
ylabel('F,Н');
grid on;
%end
Временные зависимости скорости и электромагнитного усилия синхронного явнополюсного дугостаторного двигателя в режиме частотного пуска представлены на рис. 5.
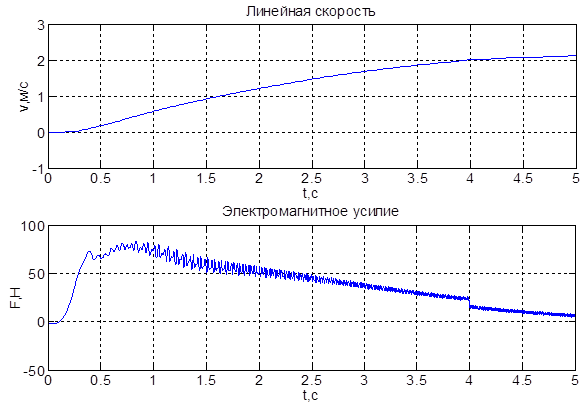
Рис. 5. Результат моделирования синхронного явнополюсного дугостаторного двигателя
в режиме частотного пуска с набросом нагрузки при t = 4 с
Зависимости токов  ,
,  ,
,  и
и  даны на рис. 6.
даны на рис. 6.
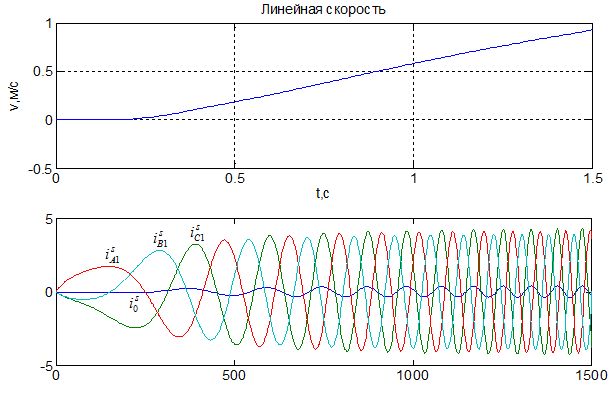
Рис. 6. Временные зависимости , , и при k = 1500
Литература:
1. Веселовский О.Н. и др. Линейные асинхронные двигатели / Веселовский О.Н., Коняев А.Ю., Сарапулов Ф.Н. – М.: Энергоатомиздат, 1991. – 256 с.
2. Емельянов А.А., Кобзев А.В., Козлов А.М., Бесклеткин В.В., Авдеев А.С., Киряков Г.А., Чернов М.В., Габзалилов Э.Ф. Математическая модель синхронного неявнополюсного дугостаторного двигателя (Z1/Z2 = 6/12) с трехфазной обмоткой индуктора с нулевым проводом // Молодой ученый. – 2014. – №15 (74, сентябрь).
3. Емельянов А.А., Богатов Е.А., Клишин А.В., Медведев А.В., Симонович В.Г. Математическая модель линейного асинхронного двигателя на основе магнитных схем замещения // Молодой ученый. – 2010. - №5. – С. 14-22.
4. Емельянов А.А., Медведев А.В., Богатов Е.А., Кобзев А.В., Бочкарев Ю.П. Программирование линейного асинхронного двигателя в MATLAB // Молодой ученый. – 2013. - №3. – С. 129-143.
5. Емельянов А. А., Медведев А. В., Кобзев А.В., Козлов А.М., Бесклеткин В.В., Авдеев А.С., Киряков Г.А., Чернов М.В., Габзалилов Э.Ф., Иванин А.Ю. Программирование линейного асинхронного двигателя с числом пазов в индукторе равном шесть // Молодой ученый. – 2013. – № 10 – С. 23-38.
6. Емельянов А. А., Медведев А. В., Кобзев А.В., Козлов А.М., Бесклеткин В.В., Авдеев А.С., Киряков Г.А., Чернов М.В., Габзалилов Э.Ф., Иванин А.Ю. Моделирование линейного асинхронного двигателя с укладкой обмотки индуктора (Z1=6) через спинку ярма // Молодой ученый. – 2013. – № 10 – С. 39-54.
7. Емельянов А.А., Кобзев А.В., Козлов А.М., Бесклеткин В.В., Бочкарев Ю.П., Авдеев А.С., Киряков Г.А., Чернов М.В., Габзалилов Э.Ф., Иванин А.Ю. Программирование линейного асинхронного двигателя (Z1 = 6) с трехфазной обмоткой индуктора с нулевым проводом // Молодой ученый. – 2014. – №2. – С. 36-51.
8. Емельянов А.А., Кобзев А.В., Козлов А.М., Бесклеткин В.В., Авдеев А.С., Чернов М.В., Габзалилов Э.Ф., Киряков Г.А. Моделирование системы АИН ШИМ — линейный асинхронный двигатель (Z1 = 6) с классическим типом обмотки с нулевым проводом // Молодой ученый. – 2014. – №6(65,май). – С. 24-43.
9. Емельянов А.А., Козлов А.М., Бесклеткин В.В., Авдеев А.С., Киряков Г.А., Чернов М.В., Габзалилов Э.Ф. Программирование синхронного неявнополюсного дугостаторного двигателя (Z1 = 6) с трехфазной обмоткой индуктора с нулевым проводом // Молодой ученый. – 2014. – №16 (75, октябрь).-c. 19-39.

