




Сжатие видеоинформации в современных видеокодеках достигается за счёт удаления временной, пространственной и статистической избыточностей видеосигналов [1,2,3]. Для устранения временной избыточности в структурную схему кодеков включают компенсатор движения. Его основной задачей является формирование как можно более точного кадра-прогноза по некоторому набору имеющихся ссылочных кадров. Каждый текущий кадр, в процессе компенсации движения, разбивается на некоторое количество небольших областей — макроблоков, после чего для каждого из таких подвижных макроблоков на ссылочном кадре методом простого перебора ищется наиболее подходящий макроблочный прогноз. При этом центр зоны поиска для каждого обрабатываемого макроблока обычно задаётся центром самого блока (Рис. 1.). Прогноз формируется путём простого перебора и поиска для каждого макроблока текущего кадра наиболее подходящего прогнозового положения макроблока на ссылочном кадре. Сигналы найденных макроблочных прогнозов вычитаются из сигналов текущих макроблоков с целью обеспечения минимальной разностной энергии остатков, что в последующих звеньях видеокодека приводит к снижению объёма кадрового кода [2].
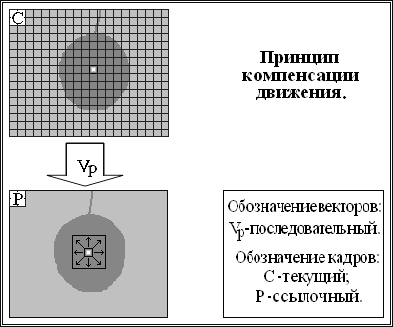
Рис. 1. Принцип компенсации движения в кадровых изображениях
Для достижения наибольшего сжатия приходится расширять границы зоны поиска, что позволяет вовлекать в обработку даже блоки, имеющие большие скорости, но неизбежно приводит к колоссальным затратам машинного времени на перебор возможных прогнозовых блочных положений. И наоборот, уменьшение затрат машинного времени требует сужения зоны поиска, а это в свою очередь отсекает возможность обработки макроблоков, имеющих большие скорости движения. В связи с этим возникает необходимость создания методов, которые могли бы обеспечить хорошие показатели сжатия данных при небольших затратах машинного времени. В данной статье предложен метод формирования границ зоны поиска макроблока — прогноза, основанный на использовании как координатных, так и скоростных векторов блоков, получаемых в ходе работы кодека.
Экспериментальный видеофрагмент (Рис.2.) и основные параметры кодека формата MPEG4 (Таблица 1), применённого при исследовании, представлены ниже. На рисунке показаны три последовательных кадра, на которых запечатлено движение с ускорением однородного по цветовым свойствам шарика. Вследствие движения, установленная изначально размерность зоны отслеживания макроблоков может оказаться недостаточной для нахождения наилучшего прогноза. Иными словами, шарик разгонится настолько, что лучший прогноз окажется за границами зоны поиска. По этой причине, были проанализированы методы для задания стартового положения поисковой области, использующие в первом случае только координаты макроблоков, а во втором случае только скорости движения макроблоков.
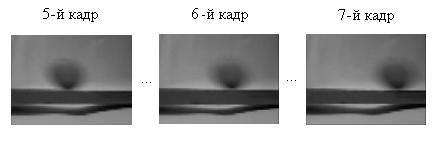
Рис.2. Последовательность кадров динамического видео.
Таблица 1
Значения параметров видеокодека, использовавшегося при исследовании
|
Параметр |
Значение |
|
Режим цветности |
чёрно-белый |
|
Количество кадров |
9 |
|
Формат кадра |
64 × 64 |
|
Режим компенсации движения |
координатный |
|
Размерность зоны отслеживания макроблока |
(варьировалась) |
|
Шаг отслеживания макроблока |
1 |
|
Размерность макроблока |
4 |
|
Шаг квантования |
1 |
Для оценки режимов формирования границ области отслеживания макроблока (Таблица 2) и (Рис.3) был выбран критерий эффективности сжатия видеоинформации, определяемый количеством битов, требуемых для кодирования кадра. Результаты исследования представлены для координатного и скоростного режимов по отдельности.
Таблица 2
Результаты исследования влияния размерности зоны отслеживания макроблока в компенсаторе движения на объем закодированных видеоданных
|
Размерность зоны отслеживания макроблока, tzs, пикселы |
5 |
10 |
15 |
20 |
25 |
|
Количество битов на кадр (координатный режим), Vс, биты |
10092 |
9988 |
9406 |
9372 |
9385 |
|
Количество битов на кадр (скоростной режим), Vs, биты |
9992 |
9774 |
9639 |
9746 |
9467 |
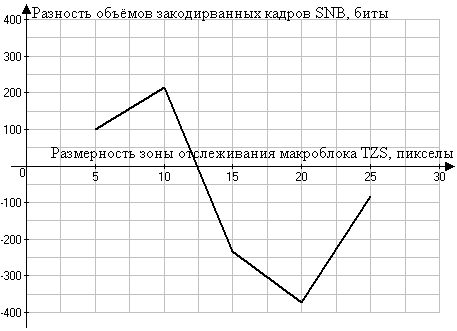
Рис. 3. Зависимость объёма закодированной информации от режима задания границ зоны отслеживания макроблока.
Результаты сравнительного анализа двух основных режимов формирования зоны отслеживания макроблоков, проанализированных по отдельности, показывают, что в одних случаях большей эффективности сжатия можно добиться, используя координатный режим, а в дрругих случаях — скоростной. До тех пор, пока размер зоны отслеживания мал, преобладает скоростной режим. Использование векторов скоростей в данном режиме переносит зону отслеживания в более выгодную для поиска часть экрана. С увеличением зоны отслеживания снижается эффективность скоростного режима и повышается эффективность координатного. Это объясняется тем, что размера зоны отслеживания оказывается и так достаточно для нахождения наилучшего прогноза без использования дополнительных векторов скоростей.
Вследствие этого был предложен смешанный, координатно-скоростной режим задания начальных положений прогнозовых областей, являющийся комбинацией двух основных режимов, который оказался более эффективным с точки зрения объёма выходных закодированных данных. Алгоритмическая реализация указанного метода представлена на рисунке (Рис. 4.). При этом критерий наличия или отсутствия движения в кадре выбирается предварительно.
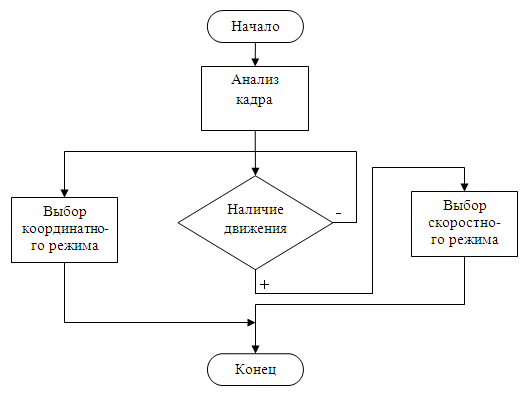
Рис. 4. Блок-схема алгоритма переключения режимов формирования зоны отслеживания макроблока
Основным преимуществом предложенного метода является повышенная эффективность сжатия данных, в среднем на 2–5 % по сравнению с существующими методами, при малых временных затратах на поиски лучших прогнозов. К недостаткам можно отнести необходимость обеспечения механизма переключения режимов формирования зоны отслеживания макроблоков, что, в свою очередь, усложняет схему исходного компенсатора движения и занимает дополнительное время на идентификацию движения в кадровых изображениях.
Литература:
1. Вернер М. Основы кодирования. — М.: Техносфера, 2004. — 288с.
2. Ричардсон Я. Видеокодирование. Н.264 и МРЕG-4 — стандарты нового поколения. — М.: Техносфера, 2005. — 368с.
3. Сэломон Д. Сжатие данных, изображений и звука. — М.:Техносфера,2004. — 368с.
