Задача обнаружения металлических предметов актуальна в различных областях деятельности человека: в горнодобывающей промышленности для защиты дорогостоящего оборудования от повреждений металлическими включениями в руде; на пищевых и обрабатывающих предприятиях для предотвращения попадания металлических фрагментов и стружки в готовую продукцию; на охраняемых объектах для обнаружения запрещенных вещей на людях и в багаже. Широко распространены поисковые металлодетекторы для обнаружения металлических предметов в приповерхностном слое земли в археологии и расчистке территории, например, для земледелия.
В работе рассмотрена система обнаружения металлических объектов при сканировании поверхности земли. К разработке предъявлялись следующие основные требования:
– использование совместно с беспилотным летательным аппаратом;
– определение и регистрация координат обнаруженных металлических предметов в глобальной навигационной спутниковой системе;
– беспроводная передача данных на компьютер оператора.
Структурная схема системы обнаружения показана на рис. 1.
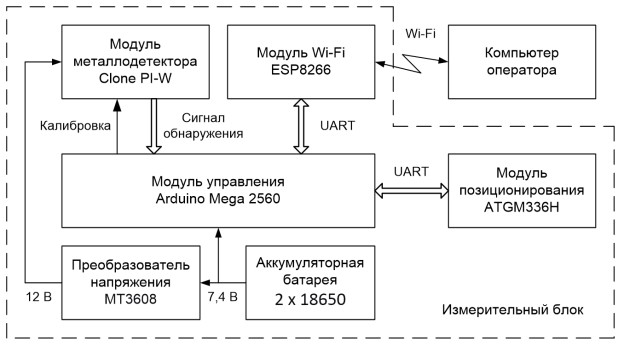
Рис. 1. Структурная схема системы обнаружения металлических объектов
На рис. 2 показаны компоненты измерительного блока системы, а на рис. 3 — измерительный блок в сборе.
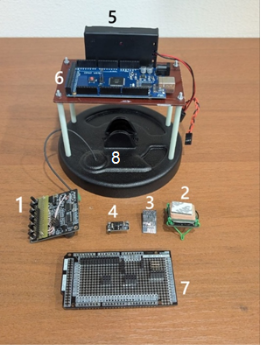
Рис. 2. Компоненты измерительного блока
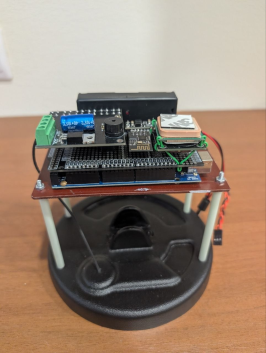
Рис. 3. Измерительный блок в сборе
На рис. 2 цифрами отмечены следующие компоненты измерительного блока: 1 — модуль металлодетектора; 2 — модуль позиционирования; 3 — модуль Wi-Fi; 4 — преобразователь напряжения; 5 — аккумуляторная батарея; 6 — модуль управления; 7 — монтажная плата; 8 — поисковая катушка металлоискателя.
На рис. 4 показано крепление измерительного блока к квадрокоптеру.
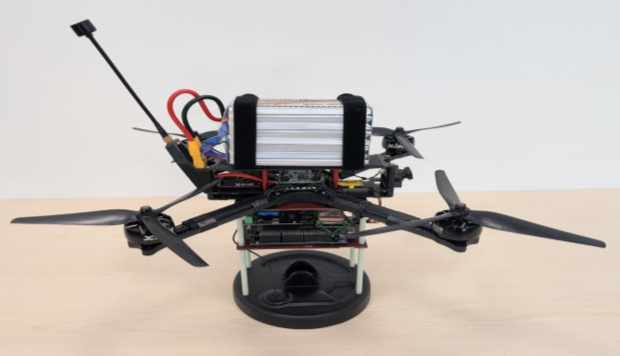
Рис. 4. Крепление измерительного блока к квадрокоптеру
В составе измерительного блока использован металлодетектор, работающий на основе метода импульсной индукции (Pulse Induction, PI) [1]. В этом методе поисковая катушка излучает короткие электромагнитные импульсы прямоугольной формы. После окончания возбуждающего импульса в результате самоиндукции в катушке возникают затухающие электромагнитные колебания, параметры которых в отсутствие металлических предметов запоминаются как эталонные. В металлических предметах зондирующий электромагнитный импульс наводит вихревой ток, поле которого изменяет форму и время затухания колебаний в катушке. На сравнении этого сигнала с эталонным основана работа импульсного металлодетектора.
Использованный в работе металлодетектор типа Clone PI-W выполнен на основе микроконтроллера ATmega8 [2]. При включении, а также при перезапуске микроконтроллера выполняется калибровка устройства, при которой поисковая катушка должна быть максимально удалена от металлических предметов. Сигнал обнаружения передается в модуль управления по проводной параллельной шине. Поисковая катушка была изготовлена из медного изолированного провода диаметром 0,4 мм и имеет 31 виток диаметром 15 см.
Для определения и регистрации географического положения обнаруженных металлических предметов использован навигационный модуль ATGM336H [3], позволяющий определять координаты по широте, долготе и высоте. Дополнительно этот модуль определяет текущую дату и время, а также скорость и направление движения. Модуль может одновременно работать со спутниками трех навигационных систем: GPS (США), Глонасс (Россия) и Beidou (Китай). При подаче питания навигационный модуль ищет доступные спутники и фиксирует начальную позицию с частотой 1 Гц. После первоначального определения координат скорость обновления может увеличиваться до 10 Гц. Модуль обрабатывает полученную информацию и передает данные в модуль управления по интерфейсу UART в виде текстовых сообщений в формате протокола NMEA 0183. Паспортная точность позиционирования модуля ATGM336H составляет около 2 м [3]. Для повышения точности определения координат существуют методы дифференциальной коррекции — кинематика в реальном времени (Real Time Kinematic, RTK) и кинематика в постобработке (Post Processing Kinematic, PPK), которые применяются в геодезии и картографии для повышения точности позиционирования в глобальной навигационной спутниковой системе до 2–3 см [4].
Беспроводная передача данных от измерительного блока к компьютеру оператору осуществляется модулем Wi-Fi ESP8266 [5]. Модуль работает в режиме точки доступа (AP) и создает собственную сеть Wi-Fi, к которой непосредственно подключается компьютер оператора. Установка режима работы модуля Wi-Fi, а также информационный обмен с модулем управления осуществляется по интерфейсу UART посредством выполнения стандартных AT-команд в программе модуля управления.
В качестве модуля управления выбрана плата Arduino Mega 2560 [6], имеющая четыре независимых аппаратных модулей UART, два из которых необходимы для взаимодействия с модулями ATGM336H (GPS/GLONAS/BeiDou) и ESP8266 (Wi-Fi), а третий — для программирования модуля управления. Модуль управления выполняет конфигурирование модулей измерительного блока, а также формирует информационное сообщение, которое с помощью модуля Wi-Fi по протоколу UDP пересылается в компьютер оператора для обработки и регистрации. По каналу обратной связи оператор может передать на модуль управления сигнал перезапуска металлодетектора для выполнения его калибровки.
Питание измерительного блока осуществляется от аккумуляторной батареи, состоящей из двух включенных последовательно элементов типа 18650. Напряжение питания 7,4 V подается непосредственно на модуль управления, в котором формируются питающие напряжения для модулей ATGM336H и ESP8266. Для питания модуля металлоискателя Clone PI-W напряжение аккумуляторной батареи с помощью повышающего преобразователя напряжения типа MT3608 увеличивается до 12 V.
Информационное сообщение поступает в компьютер оператора по каналу Wi-Fi в текстовом формате и имеет следующую структуру:
<Широта> <Долгота> <Время> <Дата> <Уровень>
Анализ, отображение и регистрация данных в компьютере оператора выполняется прикладной программой, разработанной в среде графического программирования LabVIEW. Интерфейс этой программы показан на рис. 5.
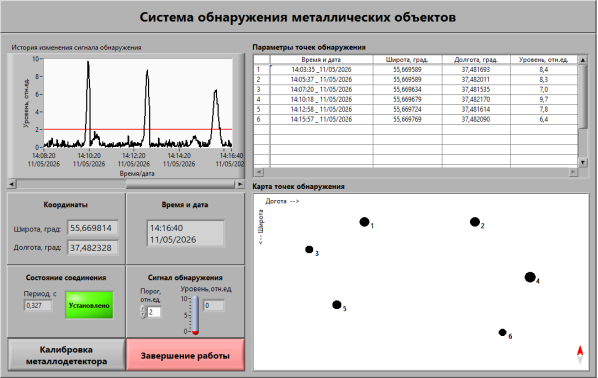
Рис. 5. Интерфейс прикладной программы
На графическом индикаторе «История изменения сигнала обнаружения» отображается изменение уровня сигнала обнаружения от времени. Индикатор имеет горизонтальную полосу прокрутки для просмотра сигнала обнаружения на всем интервале времени работы системы.
Значения широты и долготы расположения измерительного блока на местности, текущее время и дата проведения измерений, и уровень сигнала обнаружения отображаются на цифровых индикаторах, соответственно, в полях «Координаты», «Время и дата», «Сигнал обнаружения».
В области «Состояние соединения» на цифровой индикатор выводится значение периода поступления измерительных данных в компьютер оператора, а на панели зеленого цвета отображается надпись «Установлено». При значениях этого периода более 2 с панель окрашивается в красный цвет и выводится надпись «Разорвано».
По экстремальным значениям сигнала обнаружения идентифицируются точки обнаружения и соответствующие им значения времени, даты, широты, долготы и уровня сигнала заносятся в таблицу «Параметры точек обнаружения». На графический индикатор «Карта точек обнаружения» выводятся кружки, диаметр которых пропорционален уровню сигнала обнаружения. Около кружков отображаются номера точек обнаружения. На цифровом элементе управления в поле «Сигнал обнаружения» оператор может задать пороговое значение сигнала обнаружения, отображаемое на графике «История изменения сигнала обнаружения» в виде горизонтальной линии красного цвета.
Для выполнения калибровки металлодетектора служит кнопка «Калибровка металлодетектора». При нажатии кнопки «Завершение работы» данные из таблицы «Параметры точек обнаружения» и изображение индикатора «Карта точек обнаружения» сохраняются в файл, а выполнение программы прекращается.
Измерение дистанции обнаружения, обеспечиваемой измерительным блоком, проводилось в лабораторных условиях для металлических объектов разного размера. Полученные результаты приведены в таблице 1.
Таблица 1
Дистанция обнаружения металлических объектов
|
Тип и размеры металлического объекта |
Дистанция обнаружения, см |
|
Монета 5 руб. |
10 |
|
Латунный цилиндр Ø 16 мм х 26 мм |
11 |
|
Латунный цилиндр Ø 12 мм х 100 мм |
15 |
|
Алюминиевый параллелепипед 50 мм х 25 мм х 25 мм |
15 |
|
Алюминиевый цилиндр Ø 18 мм х 170 мм |
16 |
|
Стальной параллелепипед 37 мм х 26 мм х 13 мм |
17 |
|
Стальной диск Ø 120 мм х 30 мм |
30 |
Масса измерительного блока с элементами крепления составила около 360 гр. Согласно классификации Международной ассоциации по беспилотным летательным системам (Association for Unmanned Vehicle Systems International — UVSI) для применения разработанного устройства могут быть использованы беспилотные летательные аппараты (БПЛА), относящиеся к группе малых БПЛА, категории микро БПЛА с взлетной массой до 5 кг [7].
Литература:
1. Адаменко, М. В. Металлоискатели / М. В. Адаменко. — М: ДМК Пресс, 2008. — 128 с. — ISBN 5–9706–0022–9. — Текст: электронный // Лань: электронно-библиотечная система. — URL: https://e.lanbook.com/book/881 (дата обращения: 11.05.2026).
2. Металлоискатель Clone PI-W. — Текст: электронный — URL: https://radio-magic.ru/metalloiskateli/169-clone-pi (дата обращения: 11.05.2026).
3. GPS/GLONASS модуль (Trema-модуль). — Текст: электронный // IARDUINO: [сайт]. — URL: https://iarduino.ru/shop/Expansion-payments/gps-glonass-modul-trema-modul.html (дата обращения: 11.05.2026).
4. Липанов И. Д., Хомоненко А. Д., Молодкин И. А. Сравнительный анализ методов точного позиционирования беспилотных летательных аппаратов // Интеллектуальные технологии на транспорте. 2025. № 1 (41). C. 27–36. DOI: 10.20295/2413–2527–2025–141–27–36.
5. Wi-Fi модуль ESP8266 (ESP-01). — Текст: электронный // IARDUINO: [сайт]. — URL: https://iarduino.ru/shop/Expansion-payments/esp8266-serial-wifi.html (дата обращения: 11.05.2026).
6. Arduino Mega 2560 R3 (USB CH340). — Текст: электронный // IARDUINO: [сайт]. — URL: https://iarduino.ru/shop/boards/dccduino-mega-2560-rev3-na-ch340g.html (дата обращения: 11.05.2026).
7. Классификация БПЛА по летным характеристикам. — Текст: электронный — URL: https://docs.geoscan.ru/pioneer/database/const-module/classification/classification.html (дата обращения: 11.05.2026).