Для обеспечения безопасности и контроля на защищаемых труднодоступных объектах: морских и речных акваториях, портах, морских платформах для добычи нефти и газа, используются различные подводные беспроводные сети передачи информации, акустические и радиолокационные системы, гидролокаторы, гидрофоны. С развитием бесплотных подводных аппаратов (БППА) задачи обнаружения, определения, контроля подводных аппаратов, приобретают все более значимый характер. В данной статье рассматривается использование гидроакустических методов в сочетании с сетью подводных гидроакустических датчиков, с целью определения точного местоположения (определения координат) БППА.
Для работы системы гидрофонов нужно решить несколько задач, в первую очередь определить по каким параметрам будут обнаруживать подводные объекты радиогидроакустические буи: время, дальность, частота скорость, углы горизонтальной и вертикальной плоскости.
Так же необходимо решить задачу определения местоположения узлов сети — гидрофонов, относительно друг друга.
Существует несколько гидроакустических методов обработки сигналов: расчёт временного интервала распространения звуковых волн в водной среде с последующим расчетом расстояния, метод расчета, основанный на разности фаз принимаемого сигнала.
Таким образом, гидроакустические методы в сочетании с сетями, в данной статье рассмотрены методы разница во времени прихода подводных акустических датчиков, ценное средство определения местоположения подводных аппаратов. Эти методы предлагают потенциальные применения в различных областях, включая подводную навигацию, наблюдение, мониторинг окружающей среды и подводные исследования. Текущие исследования и технологические достижения в области обработки сигналов и систем подводной связи продолжают повышать возможности и эффективность методов гидроакустической локализации в подводной среде.
Ключевые слова: гидроакустические методы, подводные аппараты, определения местоположения
Various underwater wireless information transmission networks, acoustic and radar systems, sonars, hydrophones are used to ensure security and control of protected hard-to-reach objects: sea and river waters, ports, offshore platforms for oil and gas production. With the development of unmanned underwater vehicle (UUV), the tasks of detecting, determining, and monitoring underwater vehicles are becoming more and more significant. This article discusses the use of hydroacoustic methods in combination with a network of underwater acoustic sensors, in order to determine the exact location (coordinates) of the UUV.
In order for the hydrophone system to work, several tasks need to be solved, first of all, to determine by what parameters radio hydroacoustic buoys will detect underwater objects: time, range, frequency, speed, angles of the horizontal and vertical planes.
It is also necessary to solve the problem of determining the location of network nodes — hydrophones, relative to each other.
There are several hydroacoustic signal processing methods:
calculation of the time interval of propagation of sound waves in an aqueous medium followed by distance calculation, calculation method based on the phase difference of the received signal.
Thus, hydroacoustic methods in combination with networks, this article discusses the methods of the difference in the arrival time of underwater acoustic sensors, a valuable means of determining the location of underwater vehicles. These techniques offer potential applications in a variety of fields, including underwater navigation, surveillance, environmental monitoring, and underwater research. Current research and technological advances in the field of signal processing and underwater communication systems continue to increase the capabilities and effectiveness of hydroacoustic localization methods in the underwater environment.
Keywords: hydroacoustic methods, underwater vehicles, location determination.
Введение
В современном мире, важность контроля и наблюдения за водными и подводными объектами увеличивается. Бурное развитие подводной робототехнике совместно с развитием беспилотных аппаратов, вынуждает исследователей в области безопасности создавать все более эффективные устройства позиционирования, посредством акустических измерений расстояния, или направления и последующей триангуляции местоположения.
В данной статье даётся краткий обзор способов работы и измерений акустической сенсорной сети на основе GIB — буев. Буи оснащённые GPS, гидрофонами, часами, синхронизированными с часами GPS, гидроакустической приёмной системой с подводным преобразователем и радиомодемом.
Акустические системы позиционирования имеют высокую точность, от 0.2 метра до десятков метров. Точность систем варьируется в зависимости от модели позиционирования, конфигурации, характера окружающей среды, помех от внешних источников.
Важно тщательно продумать выбор системы позиционирования, исходя из конкретных требований задачи, уровни точности. Кроме того, может потребоваться непрерывный мониторинг и периодическая повторная калибровка системы для поддержания оптимальной производительности в изменяющихся подводных условиях.
В теории, использование подводных акустических систем определения местоположения, позволит снизить затраты на эксплуатационные издержки, благодаря модульности и мобильности таких систем.
По своей сути система из гидроакустических буев представляет с собой полный граф, где каждая вершина соединена с каждой другой вершиной. Количество рёбер, связей между гидроакустическими буями, равно:
где n — количество буев.
Для определения координат подводных объектов с помощью гидроакустики использует три типа систем, системы со сверхкороткой базой, системы с короткой базой, системы с длинной базой.
Далее будут рассмотрены примеры описывающие методы работы акустической системы позиционирования длинной базовой линией (ДБЛ).
При использовании системы из четырёх гидроакустических буев местоположение объекта может быть определено с помощью метода — мультилатерацией. Мультилатерация основана на измерении времени, необходимого акустическому сигналу для прохождения от буев к объекту и обратно.
Для того чтобы точно опередить расположения буев относительно друг друга, для этого постепенно решается задача нахождения расстояния в двумерной плоскости, для этого ограничивают глубину погружения гидрофонов. Гидрофоны закрепляются на гибком кабеле длиной до 300 м. Введя относительную систему координат (ОСК) нахождения первого АП буя (0, 0). Второй буй будет иметь координаты (



Координаты (



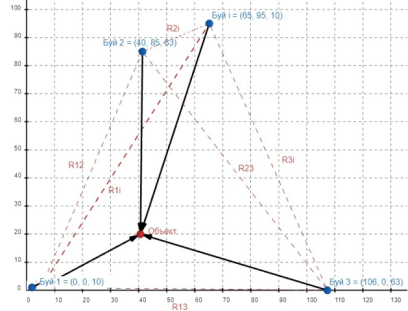
Рис. 1. Схема расположения гидрофонов и искомого объекта в двумерной плоскости
С целью повышение надёжности и точности крупномасштабной системы подводных измерений с использованием гидрофонов и буев, необходимо учитывать глубину, на которую погружены гидрофоны, система может уменьшить ошибки измерения и получить пространственные измерения акустического поля в трёхмерной модели. Для достижения этой цели буи оснащены датчиками глубины, которые с течением времени предоставляют информацию о глубине нахождения гидрофонов. Эта информация о глубине записывается одновременно с основными принимаемыми сигналами.
Система включает режим автоматической обработки, который использует вектор средних значений для определения пространственного расположения гидрофонов с учётом измеренных профилей звука вдоль дорожки. Алгоритм расчёта для получения координат гидрофонов аналогичен решению плоской задачи, но включает информацию о глубине. Система координат центрируется вокруг первого гидрофона, при этом глубины других гидрофонов пересчитываются относительно него.
Чтобы обеспечить точность и избежать ложных показаний, система включает критерии для идентификации ложных объектов. Дополнительно, когда два приемника подключены к географическим координатам, могут быть вычислены абсолютные координаты буев. Система также вычисляет горизонтальные расстояния между гидрофонами, что помогает уточнить геометрию эксперимента и помогает определить координаты групповых объектов на основе нескольких измерений.
Для повышения точности определения местоположения узлов прохода (предположительно относящихся к конкретным точкам или объектам) система использует алгоритм, основанный на методе наименьших квадратов, для оценки расстояний.

Рис. 2. Схема расположения гидрофонов и искомого объекта в трёхмерном пространстве
Для оценки координат источников и искомого объекта, можно применить акустический метод триангуляции с использованием относительных задержек сигналов, зарегистрированных датчиками в пространственно разнесённых точках приёма с известными координатами. Например, у нас есть четыре буя, помеченных как













Рассчитать разницу во времени прибытия (РВП):








Здесь t1, t2, t3 и t4 представляют собой измеренные времена прихода акустического сигнала на каждый буй. Далее идёт преобразование разницы времени прибытия в разницу расстояния (






Составим уравнения трилатерации:












(




Применив математические методы, например, итерационные алгоритмы или решения в замкнутой форме, получим решение этой системы уравнений, координаты (x, y, z) объекта в подводной среде.
Один из распространённых подходов к решению таких систем линейных уравнений заключается в устранении переменных попарно, что приводит к системе из двух уравнений с двумя неизвестными, а затем к решению для оставшихся переменных.
Нахождением координат с помощью математического метода трилатерации, может потребовать больших вычислительных затрат. На практике для эффективного и точного решения этих уравнений часто используются специализированные алгоритмы и численные методы.
Точность вычисленных координат объекта зависит от точности измерений расстояния и геометрического расположения буев. В некоторых случаях могут применяться дополнительные методы исправления ошибок и фильтрации для повышения точности оценки положения объекта.
Заключение
Таким образом, развитие подводной робототехники и беспилотных транспортных средств требует создания более эффективных устройств позиционирования, мониторинга для точного отслеживания и определения местоположения водных объектов. Статья предоставляет общую информацию о работе и измерениях сети акустических датчиков для подводного мониторинга и наблюдения, и способствуют развитию акустических систем позиционирования и их потенциальному применению в различных подводных областях.
Литература:
- Громашева О. С., Щербинина И. А. Методы локализации в подводной акустической сенсорной сети // ТДР. 2016. № 5. URL: https://cyberleninka.ru/article/n/metody-lokalizatsii-v-podvodnoy-akusticheskoy-sensornoy-seti-1 (дата обращения: 03.07.2023).
- Крюков Ю. С. Акустические методы определения координат срабатывания импульсных источников в воздушной среде [Электронный ресурс]. // ЭНБ eLIBRARY.RU/НИИПА. –2021. [Т.4.] –С.88–94. URL: https://elibrary.ru/item.asp?edn=lzlfoj(дата обращения 03.07.2023).
- Арсентьев В. Г., Криволапов Г. И. Позиционирование акустического центра сферического гидрофона // Вестник СибГУТИ. 2018. № 3 (43). URL: https://cyberleninka.ru/article/n/pozitsionirovanie-akusticheskogo-tsentra-sfericheskogo-gidrofona (дата обращения: 03.07.2023).
- Ледов А. В., Новиков А. В.. Способ применения радиогидроакустических буев реактивных (варианты). [Электронный ресурс]. URL: https://findpatent.ru/patent/252/2525189.html (дата обращения: 03.07.2023).
- Орлов В. К., Радиолокационные и радионавигационные системы. Поиск цели. [Электронный ресурс]. URL: https://www.youtube.com/watch?v=cmQsgn_FPx4&t=2281s (дата обращения: 03.07.2023).
- Кадыков И. Ф. Метод и система обнаружения целей при гидролокации. [Электронный ресурс]. URL: https://findpatent.ru/patent/238/2383899.html (дата обращения: 03.07.2023).
- Долганова Т.. Технология исследования дна акваторий и подводных объектов гидролокационными методами. [Электронный ресурс].URL:https://pandia.ru/text/80/018/52971–2.php (дата обращения: 30.07.2023)
- Льорет Дж. Подводные сенсорные узлы и сети. Датчики (Базель). 5 сентября 2013; 13 (9):11782–96. URL: 10.3390/s130911782. PMID: 24013489; PMCID: PMC3821334.
- Кардоза М. А., Кайзер Дж.Р. и Уэйд Б. «Определение местоположения высокоточных управляемых боеприпасов на шельфе», Внутри GNSS Апрель 2006, страницы 32–39
- Александр, Дикарев «Самая полная классификация подводных навигационных систем, что вы можете найти» / Дикарев Александр. — Текст: электронный // Хабрахабр: [сайт]. — URL: https://habr.com/ru/articles/478448/ (дата обращения: 30.07.2023).

