Ключевые слова: двигатель постоянного тока, драйвер, мост, полумост, управление вращением двигателя, электродвигатель.
На производстве электродвигатели постоянного тока приводят в действие различные установки, оборудование и агрегаты. Питание для них подводится от мощных батарей аккумуляторов (обычно 24 В или 12 В), а скорость регулируется за счёт изменения постоянного напряжения, приложенного к обмотке якоря. Электродвигатель управляется драйвером.
Драйвер — это микросхема или модуль, который обеспечивает преобразование электрических или управляющих сигналов в сигналы, пригодные для непосредственного управления исполнительны устройством.
В зависимости от мощности и особенностей конкретного приложения для изменения напряжения используют полумостовые и мостовые схемы, управляемые ШИМ-сигналом.
В качестве моста рассмотрим интегральную схему сдвоенного ключа верхнего уровня IR3220, а в качестве полумоста два ключа нижнего уровня IRF741. Вместе эти схемы организуют управляемый Н-мост (рис. 1) [1].
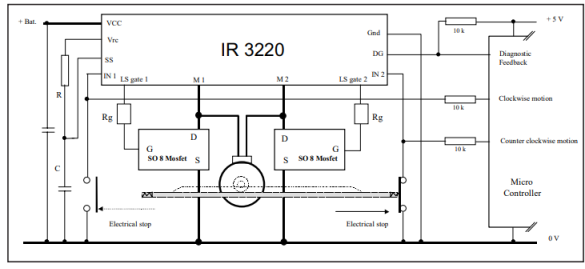
Рис. 1.Типовая схема включения драйвера
IR3220 имеет дополнительное питание VCC и два логических входа IN1, IN2. Поскольку данный драйвер оперирует большими токами и напряжениями, ему необходимо ограничивать входной сигнал, чтобы элементы схемы не перегорели. Мягкий старт реализуется c помощью RC-цепочки на выходе SS (рис. 2) [1].
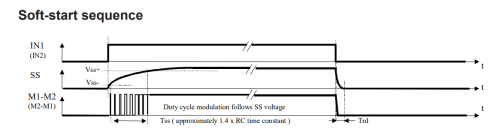
Рис. 2. Последовательность плавного пуска
Управление в данной схеме реализовано с помощью встроенного микроконтроллера, который имеет обратную связь с выходом Dg (открытый сток IRF741). С помощью реле Electrical stop можно проводить резкую остановку двигателя постоянного тока (рис. 3) [1].
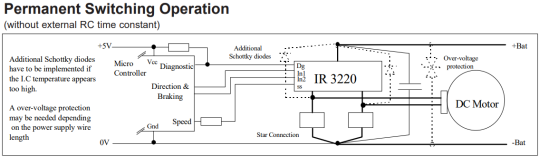
Рис. 3 Постоянное операция коммутации
Управление вращением производится с помощью выходов M1 и M2, которые выходят на два полумоста. Формирование ШИМ-сигнала показано на (рис. 4).
Полумост представляет собой полевой транзистор — прибор, с тремя выводами, в котором проводимость между двумя электродами зависит от наличия носителей заряда, которое в свою очередь регулируется напряжением, приложенным к третьему управляющему электроду [3, с 121].
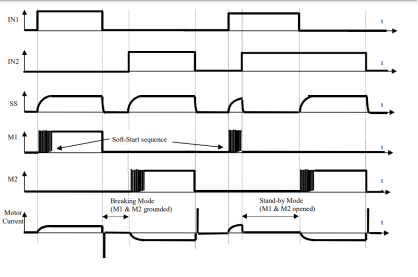
Рис. 4. Временная диаграмма сигналов
С помощью IRF741 мы можем задать направление вращения двигателя: clockwise и counterclockwise motion.
Для того, чтобы режимы вращения не совпадали в IR3220 встроена временная диаграммы защиты (рис. 5).
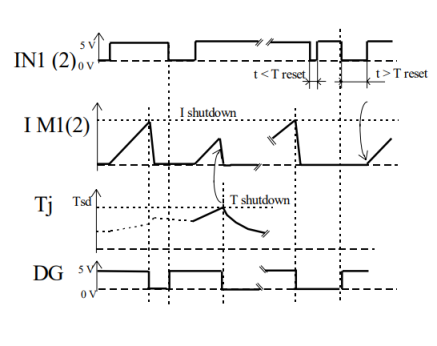
Рис. 5. Временная диаграмма защиты
Характеристики схемы сильно зависят от температуры и условий эксплуатации установки, поэтому в даташитах имеется множество графиков, в которых описаны зависимости ключевых параметров от внешних условий (рис. 5) [2].
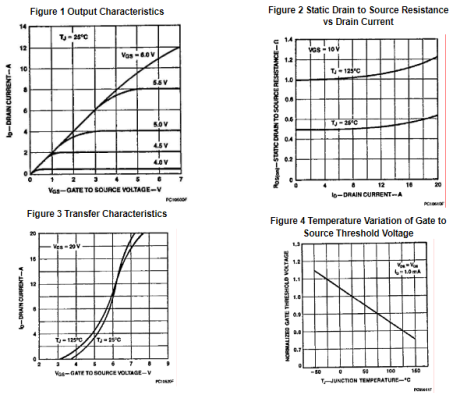
Рис. 5. Зависимость характеристик IRF741 от температуры
Плюсы данной схемы:
– обеспечивает защиту от потери управляемости каждого плеча;
– имеет логику управление Н-мостом;
– имеет плавный запуск и защиту от перегрузок по току и напряжению, что особенно важно в промышленных установках;
– возможность резкой остановки ротора Electrical stop, что необходимо для двигателей, которые питают реакторы установок.
Минусами можно назвать лишь размеры схемы, и необходимость программировать микроконтроллер драйвера IRF3220.
Рассмотренный драйвер подходит для управления промышленными двигателями постоянного тока в установках. Широкий спектр возможностей драйвера позволяет проводить тонкую настройку работы двигателя.
Литература:
- IR3220 datasheet International Rectifier; FULLY PROTECTED H-BRIDGE FOR D. C. MOTOR.
- IRF741 Datasheet. Inchange Semiconductor.
- Хоровиц П., Хилл У. Искусство схемотехники: Пер. с англ. — Изд. 2-е. — М.: Издательство БИНОМ 2014. — 704 с., ил.

