Мақалада авторлар EV3 роботын виртуалды ортада жүргізуге бағдарламала құруды және роботты бағдарламалауда қара сызықпен тура жүру үшін ПИД реттегішін қолдануды көрсетеді.
Ключевые слова: виртуалды орта, EV3 роботтары, ПИД реттегіші, бағдарламалау.
В статье авторы показывают, как запрограммировать робота EV3 для работы в виртуальной среде и использовать ПИД-регулятор для программирования робота для езды по черной линии.
Ключевые слова: виртуальная среда, роботы EV3, регулятор ПИД, программирование.
Соңғы жылдары карантинге байланысты еліміздегі білім беру саласында көптеген қиындықтар туындады. Оқушылар барлық пәндерді және қосымша үйірмелерді де үйден оқуына тура келді. Осы кезде робототехниканың да жағдайы қиын болды. Себебі, мектептің материалдық базасы роботтарды оқушылардың қолына таратып бере алатындай жағдайда болмады. Сол себепті де осы тығырықтан шығу мақсатында EV3 білім беру роботтарын виртуалды құрастыруға LEGO Digital Designer [1] бағдарламасы және виртуалды әлемде бағдарлама құрып, жүргізе алатындай мүмкіндіктері бар және Virtual Robotics Toolkit [1] бағдарламасы қолданыла бастады.
1 суретте виртуалды ортада робот құрауға арналған LEGO Digital Designer [1] бағдарламасы көрсетілген. Бұл бағдарламада роботты ешқандай шектеусіз құрастыруға болады. Шектеусіз деп роботтың бөлшектеріне шектеу жоқ дегенді айтып отырмыз. Себебі, мектептегі роботтардың, оның бөлшектерінің шектеулі екенін білеміз. Бұл үлкен ауқымды жобаны құруға да қолайлы виртуалды бағдарламалау ортасы.
Ал бүгінгі мақала роботтарды виртуалды әлемде, құрылған бағдарлама арқылы жүргізуге арналған Virtual Robotics Toolkit [2] бағдарламасы туралы болмақ. Бұл бағдарламаның кескіні 2 суретте көрсетілген.
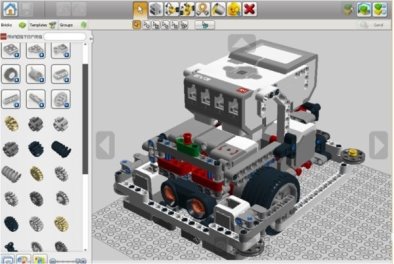
Сурет 1. LEGO Digital Designer бағдарламасы
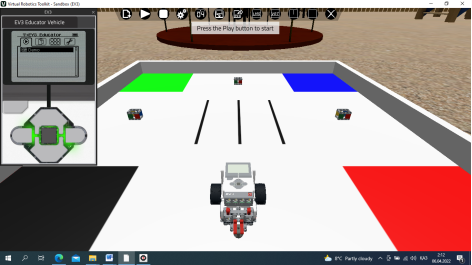
Сурет 2. Virtual Robotics Toolkit бағдарламасы
Бұл виртуалды әлемнің ерекшелігі оның роботты қарапайым EV3 бағдарламасында құрып, оны виртуалды әлемдегі роботқа жүктеп, оны осы вируалды әлемде қосу арқылы жұмысын тексере алатындығымызда болып отыр. Сонымен қатар, LEGO Digital Designer ортасында құрастырылған роботты Virtual Robotics Toolkit виртуалды әлеміне жүктеп соған бағдарлама жазуға болады.
Бағдарламаны жазу EV3 бағдарламасындағы блоктармен жүргізіледі. Роботты бағдарлама арқылы қара сызықтың бойымен жүргізу үшін қарапайым әдісті немесе ПИД [3] реттегішін қолдану арқылы да жүргізуге болады. Қарапайым бағдарламада робот түзу қара сызықтың бойымен әртүрлі доға жасап немесе дірілдеп жүретінін байқайсыз. Ал ПД реттегіші арқылы роботты сызықтың бойымен тура, біркелкі жүргуге үйретеміз.
Роботты түзу сызықпен жүргізудің қарапайым әдісі 3-ші суретте көрсетілген. Бұл кодқа қарайтын болсақ робот қара түсті көргенде оңға, ал ақ түсті көргенде солға кіші доға жасай жүреді. Бұл роботтың біркелкі сызықтың бойымен тегіс жүруіне мүмкіндік бермейді.
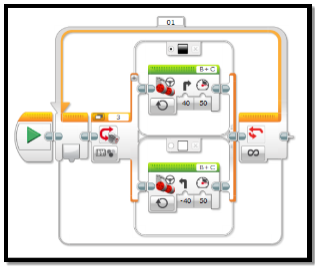
Сурет 3. Сызықпен жүруге арналған қарапайым бағдарлама коды
Енді ПИД реттегіш дегеннің не екенін анықтап алайық. ПИД-дифференциалды пропорционалды интегралды реттегіш — бұл өзгертуге қабілетті берілген параметрді сақтау үшін автоматтандырылған жүйелерге орнатылатын құрылғы (сурет 4). PID реттегіші міндетті кері байланысы бар басқару тізбегіне салынған құрылғы. Ол белгіленген мәндердің белгіленген деңгейлерін, мысалы, ауа температурасын ұстап тұруға арналған. Құрылғы датчиктерден немесе сенсорлардан алынған мәліметтер негізінде басқару құрылғысына басқару немесе шығыс сигналын береді. Бұл реттегіш арқылы робот неғұрлым қара сызыққа жақын жүруге тырысады.
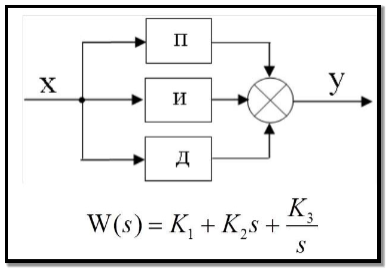
Сурет 4. Дифференциалды пропорционалды интегралды реттегіш
PID реттегішінің үш түрлі коэффициенті және жұмыс принципі бар. PID реттегішінің жұмысы реттелетін параметрді берілген деңгейде ұстап тұру үшін қажетті қуат күші туралы шығыс сигналын беру болып табылады. Индикаторды есептеу үшін күрделі математикалық формула қолданылады, оның құрамында 3 коэффициент бар — пропорционалды, интегралды, дифференциалды. Мысалға, реттеу объектісі ретінде су ыдысын алыңыз, онда температураны бумен клапанның ашылу дәрежесін реттеу арқылы белгілі бір деңгейде ұстап тұру керек. Пропорционалды компонент кіріспе мәліметтермен сәйкес келмеген кезде пайда болады. Қарапайым сөзбен айтқанда, бұл нақты температура мен қалағанның арасындағы айырмашылық алынады, реттелетін коэффициентке көбейтіледі және клапанға берілуі керек шығыс сигналы алынады. Яғни. градус құлағаннан кейін қыздыру процесі басталады, қажетті белгіден жоғары көтеріледі — өшіру немесе тіпті салқындату. Бұдан әрі интегралды компонент пайда болады, ол қоршаған ортаның әсерін немесе температураны белгілі бір деңгейде ұстап тұруға әсер ететін басқа да әсерлерді өтеуге арналған. Басқарылатын құрылғыларға әсер ететін қосымша факторлар әрдайым болғандықтан, пропорционалды компонентті есептеу үшін мәліметтер түскен кезде сан өзгеріп отырады. Сыртқы әсер неғұрлым көп болса, индикатордың ауытқуы соғұрлым күшті болады.
Интеграл статикалық қатені есептеу арқылы қателерді жою үшін қолданылады. Бұл процестегі ең бастысы — дұрыс коэффициентті таңдау, әйтпесе қате (сәйкессіздік) интегралды компонентке әсер етеді.
PID-дің үшінші компоненті — саралау. Ол жүйеге әсер ету мен кері реакция арасында пайда болатын кідірістердің әсерін өтеуге арналған. Пропорционалды реттегіш температура қажетті белгіге жеткенше қуат береді, бірақ ақпарат құрылғыға өткен кезде, әсіресе үлкен мәндерде, қателер әрқашан пайда болады. Бұл қызып кетуіне әкелуі мүмкін. Дифференциал кідірістер немесе қоршаған орта әсерінен болатын ауытқуларды болжайды және алдын-ала берілген қуатты азайтады.
Ал егер осыны EV3 бағдарламалау ортасында жазатын болсақ (сурет 5).
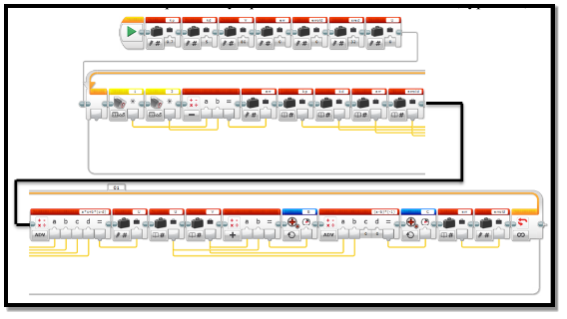
Сурет 5. EV3 бағдарламалау ортасында жазылған ПИД реттегіш
Осындай бағдарламаны робототехниканы енді бастаған оқушы жаза алмайды. Себебі, бағдарламалаудан хабары болуы керек. Әртүрлі алгоритмдерді білуі керек. Мысалға, цикл, шартты оператор және сенсорлармен жұмыс.
Осындай бағдарламаны біз виртуалды әлемде роботқа жүктеп жүргізе аламыз. Бұл 2 датчик мәні бойынша жазылған бағдарлама коды. Егер сізде бір ғана датчик болса, онда бағдарламада екінші датчиктің орнына екі шекті мәннің орта санын енгізу керек. Бағдарлама жаңағы шекті мәнге қарай түзелуге тырысатын болады. Осының арқасында робот қара сызықтың бойымен түзу де, біркелкі қозғалыс жасай алатын болады.
Осы айтылған ақпараттардан және көрсетілген бағдарлама кодтарынан әріптестеріміз өз оқушыларын жарыстарға үйден де дайындала алатындай мүмкіндік ала алады деген ойдамыз. ПИД реттегіші арқылы өз қателіктерін ескере отырып түзу жүре алатындай роботты басқару мүмкіндігін алуға болатынын айтқымыз келеді. Сонымен қатар, ПИД реттегішін кез-келген жобада қателіктерді азайту үшін қолданылатынын көрсеттік.
Әдебиет:
1. Антипов, Д. Н.білім берудегі робототехникадағы виртуалды ортаның әлеуеті / Д. Н. Антипов. — Мәтін: тікелей / / Жас ғалым. — 2018. — № 31 (217). — С. 1–3. — URL: https://moluch.ru/archive/217/51435.
2. Virtual Robotics Toolkit [Электронный ресурс] / Virtual Robotics Toolkit. — URL: https://www.virtualroboticstoolkit.com/.
3. Алексей Овсянников, [Электронный ресурс] /«ПИД-регулятор доступно и просто», URL: http://edurobots.ru/2020/02/pid-robo, 21.02.2020.

