Двигатель — один из главных исполнительных механизмов на борту дрона. В статье автор подвергает анализу бесколлекторный двигатель как наиболее подходящий вариант двигателя для беспилотного летательного аппарата, резюмируя и обосновывая свой выбор.
Ключевые слова : бесколлекторный двигатель, объект управления, электропривод.
Бесколлекторные двигатели (или по-другому бесщеточные) постоянного тока управляются электроникой, которая заменяет щетки и коллектор, необходимые для щеточных двигателей постоянного тока. В этой статье описываются многие преимущества бесколлекторных двигателей постоянного тока по сравнению с их щеточными аналогами.
Бесщеточные двигатели постоянного тока не имеют щеток, у них более долгий срок службы и низкий уровень шума, более надежный контроль скорости, чем у коллекторных двигателей постоянного тока, низкий электромагнитный шум и потенциал энергосбережения. Им так же доступен широкий спектр вариантов, подходящих для различных конструкций изделий.
Бесщеточные двигатели постоянного тока не имеют щеток., а коллекторные двигатели постоянного тока сочетают в себе вращающийся якорь с неподвижными магнитами (статор), используя щетки и коммутатор для подачи тока на катушку якоря. Бесщеточные двигатели постоянного тока, напротив, имеют ротор, статор, датчик вращения и схему управления. Вместо щеток и коммутатора ток через катушку статора регулируется электронным способом с помощью полупроводникового переключения. Бесщеточные двигатели постоянного тока можно разделить на двигатели с внешним ротором и двигатели с внутренним ротором.
Двигатели с внешним ротором. В этих двигателях ротор с постоянными магнитами вращается вокруг центрального статора. Эта конфигурация устраняет необходимость в том, чтобы магниты были маленькими, и облегчает уменьшение размеров оборудования, поскольку позволяет использовать внешний ротор, например, в качестве приводного вала вентилятора.
Двигатели с внутренним ротором. Эти двигатели имеют конфигурацию, противоположную конфигурации традиционных щеточных двигателей постоянного тока, с цилиндрическим ротором, содержащим магниты, вращающиеся внутри концентрически расположенных катушек. Это позволяет ротору иметь малый момент инерции и облегчает миниатюризацию двигателя. Проиллюстрируем эти два двигателя на рисунке 1.
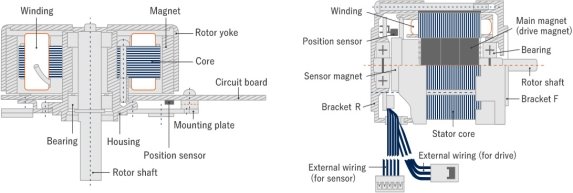
Рис. 1. Бесщеточные двигатели постоянного тока (BLDC): двигатель с внешним ротором (слева) и двигатель с внутренним ротором (справа)
Долгий срок службы и низкий уровень шума. Одной из проблем с щеточными двигателями постоянного тока является износ щеток и коллектора, которые находятся в постоянном контакте. В некоторых случаях истирание щеток также является источником пыли или искрения.
На бесщеточных двигателях постоянного тока такого износа не происходит, поскольку у них отсутствует этот механический контакт. Поскольку отсутствие абразивной пыли или шлама продлевает срок службы двигателя, это помогает снизить частоту технического обслуживания при плановой замене двигателя. Выбор бесщеточных двигателей постоянного тока для критически важного оборудования продлевает срок его службы и позволяет избежать дефектов, связанных с двигателем.
Характерный скрежет, издаваемый щеточными двигателями при трении щеток о коллектор, может быть результатом резонанса между деталями или слышимым шумом из-за их трения друг о друга, звуком, создаваемым вибрацией или другим движением в направлении тяги ротора, шумом ветра, если ротор имеет встроенный вентилятор или электромагнитное гудение из-за магнитных сил, вызывающих вибрацию сердечника статора.
Более надежный контроль скорости, чем у коллекторных двигателей постоянного тока. Как и в случае с щеточными двигателями постоянного тока, необходимо учитывать момент инерции вала двигателя. Как двигатель, так и механизм передачи мощности (карданный вал) имеют момент инерции, величина которого зависит от веса, диаметра и длины. Необходим соответствующий контроль, чтобы справиться с высоким пусковым моментом, возникающим, когда двигатель начинает вращаться, что требует более высокого тока, чем когда двигатель работает с постоянной скоростью. Определенное количество энергии также теряется из-за нагревания и вибрации при вращении вала.
В бесщеточных двигателях постоянного тока устройство Холла (магнитный датчик) используется для управления с обратной связью и для определения состояния двигателя. Регулируя напряжение двигателя, скорость двигателя можно поддерживать постоянной, несмотря на изменения нагрузки. Точное регулирование скорости возможно с бесщеточными двигателями постоянного тока.
Низкий электромагнитный шум. Коллекторные двигатели постоянного тока имеют тенденцию создавать шум из-за значительного искрения, возникающего при каждом переключении контакта между щетками и коллектором. Шум — это форма электромагнитной энергии, как и другие электрические сигналы. При отсутствии надлежащих мер контроля это может создавать помехи для других устройств или электронных компонентов, вызывая сбои в работе или снижение производительности.
Ток двигателя бесщеточных двигателей постоянного тока можно контролировать электронным способом. Поскольку это, как правило, приводит к меньшему электромагнитному шуму, считается, что они обеспечивают лучшую эффективность преобразования, чем коллекторные двигатели постоянного тока, с более низкими уровнями потерь энергии и шума.
Потенциал энергосбережения. Вес отдельных деталей является важным фактором снижения общего веса изделия. Поскольку для них не требуется щеточный узел, конструкция бесщеточных двигателей постоянного тока по своей природе более гибкая, что позволяет уменьшить их размер и вес. Кроме того, чем меньше детали двигателей, тем меньше энергии требуется для их вращения.
Учитывая, что потребление энергии электродвигателями, по оценкам, составляет от 40 до 50 % мирового потребления электроэнергии, более высокая эффективность преобразования (что означает, что для обеспечения заданного количества вращательной энергии требуется меньше электроэнергии) также помогает снизить нагрузку на окружающую среду.
Характеристики бесщеточных двигателей постоянного тока, такие как длительный срок службы, простота управления и низкий уровень электромагнитного шума, необходимы для обеспечения надежного управления оборудованием. Они также способствуют продлению срока службы бытовой техники, периферийного оборудования для персональных компьютеров и других подобных продуктов.
Общее воздействие продуктов на окружающую среду также снижается за счет использования двигателей, не содержащих свинца, шестивалентного хрома или других материалов, на которые распространяются экологические стандарты.
Доступен широкий спектр вариантов, подходящих для различных конструкций изделий. В отличие от щеточных двигателей постоянного тока, которые не могут работать без щеток и коммутаторов, бесщеточные двигатели постоянного тока обеспечивают гибкость в отношении размера и расположения схемы управления. Это означает, что они могут соответствовать различным пространственным условиям целевых систем, используя низкопрофильные роторы, размещая роторы вокруг систем, проектируя двигатели длинной и тонкой формы и т. д.
Использование преимуществ бесщеточных двигателей постоянного тока в конструкциях. В то время как щеточные двигатели постоянного тока работают с помощью своих щеток и коммутатора, в бесщеточных двигателях постоянного тока используется переключающий элемент в виде полупроводникового переключателя. Устранение механического контакта, возникающего при снятии щеток с двигателя, также дает многочисленные преимущества. Эта статья поможет решить, стоит ли использовать бесколлекторные двигатели постоянного тока.
Литература:
- Башарин, А. В. Управление электроприводами / А. В. Башарин, В. А. Новиков, Г. Г. Соколовский. —: Энергоиздат, 1982. — 470 c.
- Бекишев, Р. Ф. Электропривод / Р. Ф. Бекишев, Ю. Н. Деменьтев. — М.: Энергия, 2016. — 320 с.
- Кацман, М. М. Электрические машины / М. М. Кацман, В. Л. Ерман, И. П. Ильин. —: Энергия, 2020. — 463 c.
- Уразбахтин, Р. Р. беспилотные летательные аппараты на солнечных батареях / Р. Р. Уразбахтин. — Санкт-Петербург: 2016. — 253 c.
- Терехов, В. М. Система управления электроприводов / В. М. Терехов, О. И. Осипов. —: Академия, 2005. — 301 c.

