




Статья содержит результаты обзора информационных и научно-технических материалов в сфере управления группой беспилотных летательных аппаратов. Определены типы задач, которые могут выполняться группой воздушных роботов, выделены основные стратегии управления и их особенности. Сформированы общие позиции, необходимые для разработки детализированного алгоритма группового управления.
Ключевые слова: беспилотный летательный аппарат, БЛА, группа беспилотных аппаратов, централизованное управление, децентрализованное управление.
Тенденции развития и применения в военной сфере беспилотной авиационной техники обусловливают активизацию и актуальность разработок по созданию многофункциональных комплексов (МФК) с использованием воздушных роботов. Такой комплекс создаётся как боевая система, предназначенная для выполнения следующих задач:
– разведывательная — мониторинг участков местности, надводной поверхности, воздушного пространства, объектов промышленности и инфраструктуры; картографирование; наблюдение за участками шоссе, дорог, путей и движущимися транспортными средствами; поиск, обнаружение и сопровождение войсковых объектов (целей);
– ударная (боевая) — обнаружение и поражение стационарных и движущихся объектов (целей), корректировка огня артиллерии, подсветка целей и контроль результатов стрельбы;
– транспортная — доставка, перемещение по воздуху различных грузов.
Наиболее сложными для реализации задачами являются разведка и выполнение ударных функций. Принципом решения разведывательно-ударных задач является групповое применение беспилотных летательных аппаратов (БЛА).
Полётное задание для разведывательных и ударных БЛА при совместном их использовании формируется оператором МФК (командиром). Из-за того, что большинство войсковых объектов разведки и поражения являются малоразмерными, и их большое количество находится на обширной территории, необходимо применение целевой группы БЛА. Можно предположить, что групповое применение беспилотников обеспечит повышение эффективности выполнения заданий за счёт сокращения времени исполнения операций, увеличения площади исследуемой территории (водной поверхности), возможности замены сбитого или выведенного из строя беспилотника из состава разведывательно-ударной-транспортной группы. Следует отметить, для реализации группового применения БЛА разработчикам МФК необходимо решить сложную инженерно-техническую задачу, связанную с определением принципов применения группы БЛА и выбора стратегии управления воздушными роботами в полёте.
В общем случае выделяют две основные стратегии управления группировкой: централизованное и децентрализованное [1].
Централизованное управление — способ, при котором существует выделенный наземный центр управления и планирования операций, из которого оператор осуществляет и контролирует постоянный обмен информации с группой БЛА. Необходимые вычисления и обработка информации происходит в наземном центре управления. При этом, оператор может осуществлять управление полётом и обмен информацией по каналам связи с каждым бортом из группы (рисунок 1) либо с использованием канала связи только с «ведущим» летательным аппаратом, то есть, бортом, выполняющим роль управленца или ретранслятора команд для других аппаратов из состава группы (рисунок 2).

Рис. 1. Способ централизованного управления группой БЛА

Рис. 2. Способ централизованного управления группой БЛА с «ведущим»
Преимуществом такого способа управления разведывательными и ударными БЛА является простота реализации процессов подачи управляющих команд и обмена информацией. Данная стратегия считается эффективной при управлении небольшими группами движущихся объектов [2].
Децентрализованное управление (рисунок 3) — это способ, при котором основной объём вычислений производится не в наземном центре управления и планирования операций, а на борту беспилотных машин. Данный способ включает в себя три варианта управления группой воздушных роботов: коллективная, стайная и роевая стратегии управления [2].
Обмен информацией с наземным пунктом управления происходит периодически по требованию оператора либо согласно определённым временным интервалам в соответствии с заранее утверждённой циклограммой обмена данными.
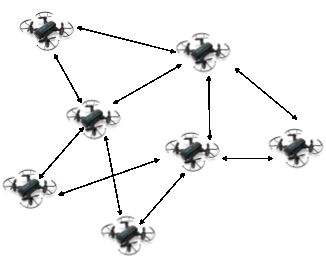
Рис. 3. Схема взаимодействия БЛА при децентрализованном (роевом) управлении
Преимуществом такой «интеллектуальной» стратегии является автономность работы группировки (в случае потери связи с оператором группировка может продолжать выполнение полётного задания). Обеспечивается работоспособность группы БЛА в целом и масштабируемость её численности, гибкая структура группы. Однако такая «интеллектуальность» будет обеспечиваться более сложными алгоритмами управления и развитой аппаратной частью (как наземной, так и бортовой), которая должна обеспечивать ресурсоёмкие вычисления в режиме реального времени. Это обусловливает необходимость решения довольно объёмной и сложной инженерно-технической задачи с большим количеством входных параметров. Для её постановки и решения требуется, прежде всего, определить особенности организации группового применения БЛА. В этой связи был проанализирован имеющийся опыт выполнения реальных операций группой воздушных роботов.
В работах [3, 4] показаны условия успешного применения приёмов централизованного управления группой БЛА в рамках выполнения задач воздушной разведки. Группа может масштабироваться до 4–5 аппаратов. Оператор способен контролировать работу всех воздушных роботов одновременно.
Однако одним из заметных событий, произошедшим за последнее время, стало применение беспилотников в рамках военной операции в Сирии. По данным информационных источников [5] была использована массированная атака БЛА самолётного типа (больше десяти беспилотников) с использованием современных технологий наведения по спутниковым координатам GPS. Сброс взрывных устройств должен был осуществляться с использованием дистанционного управления. Очевидно, что каких-либо сложных распределённых вычислений для группы беспилотников не проводилось, а полётное задание выполнялось по заранее спланированному алгоритму, обеспечивающему централизованное управления группой разведывательных и ударных аппаратов.
Агентство перспективных оборонных разработок министерства обороны США (DARPA) разрабатывает программу «OFFSET», связанную с развитием принципов ведения боя в условиях городской среды [6]. Основная задача программы — научить рой разведывательных и ударных беспилотников (в состав роя может входить более ста аппаратов) не просто самостоятельно объединяться в группы и выбирать лидера (ведущего воздушного робота), но и «продумывать» план выполнения полётного задания. Формируемая группа беспилотников предназначена для сопровождения небольших пехотных подразделений при действиях в условиях плотной городской среды, предоставляя бойцам различную тактическую информацию. Состав группы может масштабироваться и достигать численности до 250 роботов. Несмотря на такую многочисленность аппаратов одного оператора для управления группой беспилотников будет достаточно [6]. Как отмечается в печати, это становится возможным благодаря наличию специального перечня тактических действий, которые могут выполняться группой боевых БЛА. Такой перечень «зашит» в программном обеспечении пульта управления, которым пользуется оператор. Очевидно, что здесь прослеживается принцип «смешивания» стратегий централизованного управления (оператор задаёт «тезисы» полётного задания) и децентрализованного управления (сформированная группа БЛА выполняет полётное задание на основе обработки полученных от оператора исходных данных и информации из окружающей среды).
Ещё один вариант успешного управления группой БЛА большой численности был реализован китайскими специалистами. Они спроектировали и использовали интеллектуальную «облачную» систему управления, позволяющую одному оператору контролировать полёт и функционирование группы из 1374 миниатюрных беспилотников. Построение группы в воздухе осуществлялось на основе шаблонов (схем), заранее разработанных дизайнерами в определённом формате и загруженных в «облачную» систему. Расстояние между миниатюрными БЛА при совершении группового полёта составляло от 1,5 до 3 метров [7].
Обзор современных достижений по обеспечению группового применения миниатюрных БЛА свидетельствует о том, что оператору может быть предоставлено специальное средство, с помощью которого он может управлять не просто несколькими беспилотниками, а целыми сотнями и даже тысячами миниатюрных аппаратов. На оператора могут возлагаться следующие задачи (функции):
– определение боевых задач и выбор состава группы БЛА;
– формирование карты местности, программы разведки, поиска, сопровождения и поражения объектов;
– ввод входных данных, указание районов (зон) действия, координат, скорости и направления движения целевых объектов;
– наблюдение за ходом группового полёта беспилотных аппаратов и контроль выполнения заданий (при наличии и исправности каналов радиосвязи).
Остальные операции (функции) по выполнению боевых задач должны выполняться системой управления, развёрнутой на наземной и бортовых составляющих беспилотного комплекса: определение и анализ требуемого количества беспилотных аппаратов; формирование группы из стартовавших и совершающих полёт беспилотников, выбор маршрутов полёта и маневрирования; целераспределение между воздушными роботами и др.
Таким образом, разработка системы управления для применения группы воздушных роботов должна включать качественно-количественный анализ процессов применения разведывательных, ударных и транспортных аппаратов. Основным требованием является оценка возможностей создания аппаратуры многофункциональных комплексов с миниатюрными БЛА, обеспечивающей сочетание принципов централизованного и децентрализованного управления. Система управления должна обладать искусственным интеллектом, средствами проведения сложных вычислений с задействованием наземной составляющей (пункт управления) и бортовых средств миниатюрных беспилотных аппаратов.
Алгоритм управления группой БЛА должен позволять определять условия и способы определения рационального состава боевой группы, решать задачи ситуационного моделирования, целераспределения и оценки эффективности выполнения полётного задания.
Литература:
- Ерофеева В. А., Иванский Ю. В., Кияев В. И. Управление роем динамических объектов на базе мультиагентного подхода / Компьютерные инструменты в образовании, 2015, № 6. — С. 34–42.
- В. С. Боровик, В. И. Гуцул, С. А. Клестов и др. Коллективы интеллектуальных роботов. Сферы применения: монография / под ред. В. И. Сырямкина — Томск: SST, 2018. — 140 c.
- Многоцелевой комплекс «Тичпак» с беспилотными летательными аппаратами [Электронный ресурс]. — URL: http://www.vega.su/production/ (дата обращения: 12.10.19 г.).
- Орлан-10 [Электронный ресурс]. 2019 — URL: https://ru.wikipedia.org/wiki/Орлан-10 (дата обращения: 12.10.19 г.).
- В МО РФ рассказали о сорванной атаке террористов с использованием БПЛА на базы в Тартусе и Хмеймиме [Электронный ресурс]. 2018. — URL: https://tvzvezda.ru/news/forces/content/201801081746–62gn.htm (дата обращения: 12.10.19 г.).
- Watch DARPA test out a swarm of drones [Электронный ресурс]. 2019. — URL: https://www.theverge.com/2019/8/9/20799148/darpa-drones-robots-swarm-military-test (дата обращения: 12.10.19 г.).
- В Китае установлен рекорд — 1374 дрона в течение 13 минут выполняли синхронный полёт [Электронный ресурс]. 2018. — URL: https://www.ixbt.com/news/2018/05/02/ (дата обращения: 12.10.19 г.).
