Проблема, которая навела на мысль о создании интерфейсного прототипирования, является проблема создания сложных технических комплексов. Даже в прошлом веке уже существовали достаточно сложные технические комплексы, которые уже надо было применять — технологии интерфейсного прототипирования.
Ключевые слова: прототипирование, интерфейс, аппаратная платформа, микроконтроллер.
Сейчас на волне цифровизации в различных отраслях промышленности, транспортной отрасли, сложность технических систем растет, более того, они строятся по модульному принципу, для того чтобы быть надежными и ремонта пригодными. Поэтому используется повсеместно стандартизированные интерфейсы. Благодаря этому технология интерфейсного прототипирование может стать инструментом, экономящим значительное количество месяцев ручного труда человека — инженеров-проектировщиков.
Статья посвящена развитию технологий интерфейсного прототипирования аппаратной платформы роботов. Исследование является актуальным, так как сейчас разрабатываются: беспилотные суда, автоматические заводы и фабрики, роботизированные порты, беспилотные автомобили, электростанции и т. д. Развитие средств автоматики и информационных технологий прогнозируется в морской транспортной отрасли в ближайшие 10 лет.
Результаты исследований и последующие разработки программного обеспечения на их основе позволят ускорить процесс создания интеллектуальных систем, комплексов, состоящих из модулей со стандартными интерфейсами.
Далее приводится пример комплектующих и сам интерфейсный прототип робота.
Таблица 1
Комплектующие
|
Система |
Модуль |
Характеристики |
|
Процессор |
Arduino Mega |
Микроконтроллер: ATmega2560; Рабочее напряжение: 5В; Входное напряжение: 7–12В; Входное напряжение (предельное): 6–20В; Постоянный ток через вход/выход: 40 mA; Постоянный ток для вывода 3.3 В: 50 mA; Флеш-память: 256 KB; ОЗУ: 8 KB; Энергонезависимая память: 4 KB; Тактовая частота: 16 MHz. |
|
Ориентация |
BNO080 |
I2C (по умолчанию): до 400 кГц; SPI: до 3 МГц; UART: 3 Мбит/с; |
|
Позиционирование |
GY-NEO6MV2 |
Обмен данными: UART; Автономный GPS приемник; |
|
Приемопередатчик |
ESP8266 |
IEEE 802.11 b/g/n; MCU 32-бит; АЦП 10-бит; |
|
Подсчет оборотов винта |
F249 |
Инфракрасный сенсор; Рабочее напряжение 3.3–5.5 В. |
|
Привод пера руля |
MG996R |
Крутящий момент: 12 кг/см; Напряжение: 4.8–7.2 В; Скорость: 0.13–0.17сек /60 оборотов. |
|
Главный двигатель |
JGA25–370 |
Напряжение: 12В (пост. ток); Выходная мощность:0.7–2W; Редуктор: 900 об.мин. |
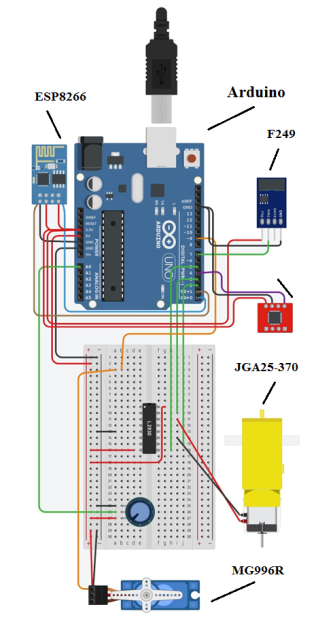
Рис. 1. Общая схема соединений компонентов робота
Интерфейсное прототипирование облегчит проектирование и сборку роботов сводя количество ошибок проектирования к минимуму.
Литература:
- Блум, Д. Изучаем Arduino: учеб.пособие / Д. Блум. — СПб.: БХВ-Петербург, 2015. — 336 с.
- Бокселл, Д. Изучаем Arduino. 65 проектов своими руками / Д. Бокселл. — СПб.: Питер, 2017. — 400 с.
3. Копосов, Д. Г. Робототехника на платформе Arduino: учеб.пособие / Д. Г. Копосов. — М.: БИНОМ. Лаборатория знаний, 2019. — 176 с.

