Модуль предупреждения столкновения судов предназначен для содействия в принятии решений, при плавании судов на виду друг у друга. Механизм вывода данных формирует рекомендации к текущей ситуации на море.
Активное торможение (реверс) судна торможение судна за счет работы маршевой двигательной установки в режиме «полный назад», а также скорость такого торможения и тормозной путь судна. Торможение называется полным, если первоначальная скорость движения судна была максимальной [3, с. 183].
Маневр активного торможения можно разделить на три периода (рис. 1):
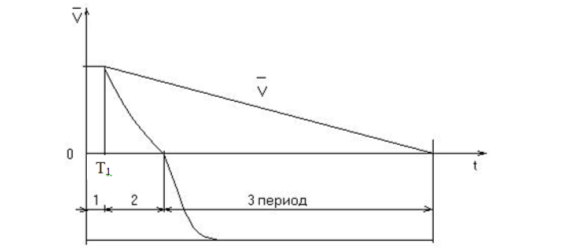
Рис. 1. График процесса торможения судна с помощью гребного винта
В этот период судно следует с постоянной скоростью установившегося движения ![]() .
.
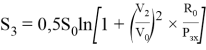
Путь судна, пройденный в этот период:
![]() . (1)
. (1)
![]()
Продолжительность периода ![]() зависит от типа энергетической установки, наличия или отсутствия дистанционного управления главными двигателями и действий механика. Время
зависит от типа энергетической установки, наличия или отсутствия дистанционного управления главными двигателями и действий механика. Время ![]() определяется только по эксперименту на конкретном судне.
определяется только по эксперименту на конкретном судне.
Движение судна в этом периоде описывается следующими уравнениями:
![]() –путь, пройденный за второй период.(2)
–путь, пройденный за второй период.(2)
 — скорость судна в конце второго периода.(3)
— скорость судна в конце второго периода.(3)
![]() — время второго периода.(4)
— время второго периода.(4)
 — участок активного торможения.(5)
— участок активного торможения.(5)
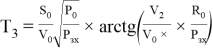 — время активного торможения.(6)
— время активного торможения.(6)
![]() ;(7)
;(7)
![]() (8)
(8)
Окончательные полные выражения времени и пути торможения судна получаем суммированием отдельных их значений по трем периодам:
![]() ;(9)
;(9)
![]() (10)
(10)
Если по расчетам ![]() то следует провести маневр изменением курса.
то следует провести маневр изменением курса.
В случае активного торможения, необходимо выключить двигатель и двигаясь по инерции, развернуть винты на движение назад. Подтормаживая винтами, судна сокращает дистанцию торможения. Длина пути активного торможения меньше, чем пассивного.
Система сообщает о необходимости активного торможения (рис. 2).
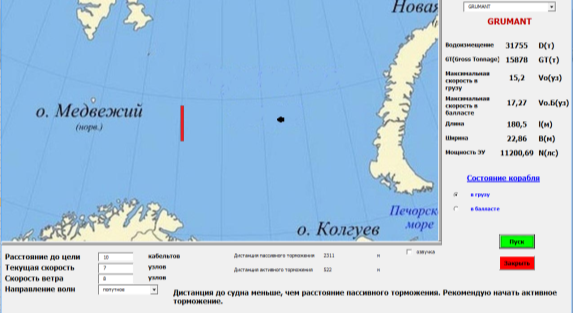
Рис. 2. Рекомендация команде на начало активного торможения судна
Рекомендация на маневр уклонения судна (рис. 3).

Рис. 3. Рекомендация команде начать маневр уклонения судна
Маневренные характеристики судна необходимо учитывать при решении практически всех задач управления судном, в частности:
– при расчетах маневра для предупреждения столкновений при расхождении судов;
– при проведении швартовных операций;
– при плавании и маневрировании в узкостях и на ограниченных акваториях;
– при постановке судна на якорь и швартовные бочки;
– при плавании в ледовых условиях, как при самостоятельном ледовом плавании, так и при плавании в составе каравана под проводкой ледокола.
Информация для расчета тормозного пути берется их таблицы по техническим характеристикам судна и шкале Бофорта. При расчетах учитываются коэффициенты волнения только при диапазоне 5−8 баллов по шкале Бофорта. До 4 баллов волнение моря не существенно для сухогрузов большого тоннажа. При 9 баллах и выше судам рекомендуется обогнуть сейсмическую зону в море или зайти в порт.
База моделей в модуле это формулы для расчета длины тормозного пути судна (активного и пассивного) и времени на каждом этапе торможения. Сравнение текущего расстояния до судна по эхолоту с расчетными данными позволяет сделать вывод о характере принимаемого решения о последующем движении судна.
Обязательной составляющей модуля является звуковое сопровождение. Оно необходимо в том случае, когда идет работа с большим количеством разнообразной информации и вахтенному даются рекомендации, не привлекая зрительное внимание к экрану [1, с. 125].
Модуль является дополнительным к штатно устанавливаемой навигационной системе судна. Во время управления движением судна необходимо внимательно сравнивать показания модуля с показаниями других приборов, проводя визуальный анализ окружающей обстановки и учитывайте опыт по управлению морскими судами во избежание неверной оценки ситуации и состояния морского судна.
Модуль спроектирован и изготовлен так, чтобы удовлетворять жесткие требования к оборудованию, работающему в морских условиях. Однако никакой механизм или устройство, если оно не будет хорошо смонтировано, эксплуатироваться надлежащим образом и хорошо обслуживаться [2, с. 238].
Литература:
- Вагущенко Л. Л. Современные информационные технологии в судовождении [Электронное учебное пособие] / Л. Л. Вагущенко Одесса: ОНМА, 2013 135 с.
- Вагущенко Л. Л. Судовые навигационно-информационные системы. Одесса, Латстар, 2004 302 с.
- Васильев А. В. Управляемость судов: Учеб. пособие. — Л.: Судостроение, 1989. 328 с.: ил.

