




Статья посвящена модернизации робота-пылесоса, который ставит перед собой задачу отчистить заданную поверхность максимально удобно и чисто. Чтобы улучшить качество уборки, производится замена щетки, расположенною в передней части робота-пылесоса, на несколько поворотных круговых щеток и добавили систему влажной уборки. Для повышения удобства использования робота-пылесоса, встроен модуль голосового управления.
Проведено тестирование робота-пылесоса Samsung Powerbot SR20H9050U, составлена его характеристика и выявлены некоторые недостатки. В кинематическая схеме оси ведущих колес расположены на одном диаметре условной. Форма корпуса подковообразная, что уже не позволяет устройству совершать разворот на месте без изменения границ, занимаемой площади (рис. 1). Поэтому при встрече с препятствием робот должен немного отъезжать назад, и только потом отворачивать. Узкие места, в которых он не может развернуться, являются проблемой для данного робота-пылесоса. Ведущие колеса имеют глубокий резиновый протектор при больших габаритах, и их вертикальное перемещение на подпружиненных рычагах подвески определяет высокую проходимость робота. Робот-пылесос может преодолевать препятствия высотой до 15 мм. При уборке пылесос подхватывает мусор с пола, засасывая его потоком воздуха в отверстие за щеткой. Боковых щеток нет, вместо них спереди в углах расположены специальные канавки-воздуховоды, благодаря которым хотя бы легкий мусор может извлекаться из углов.

Рис. 1. Внешний вид робота-пылесоса

Рис. 2. Схема всасывания воздуха: 1-циклонная камера; 2-спираль; 3-центральная часть камеры; 4-выход воздуха
Благодаря высокой мощности всасывания и особенностям конструкции пыль частично засасывается непосредственно с очищаемой поверхности и перенос мусора в пылесборник выполняется именно с потоком воздуха, а не перекидывается щеткой. Воздух и грязь разделяются в основном циклонным способом — засасываемый воздух поступает снизу (рис. 2) в циклонную камеру, где сильно закручивается по восходящей спирали, при этом мусор центробежной силой прижимается к стенкам камеры и через окно в верхней части выбрасывается в основную емкость пылесборника. Воздух далее поступает в центральную часть камеры и проходит через предмоторный фильтр, где задерживается оставшаяся мелкая и легкая пыль, и уже потом воздух попадает в отсек вентилятора. Робот-пылесос оснащён системой очистки углов. Данная функция с помощью щетки, расположенной на передней части пылесоса, позволяет более эффективно очищать от пыли и мусора углы и плинтусы (рис. 3).

Рис. 3. Система отчистки углов, плинтусов и стен
При соприкосновении пылесоса со стеной специальная лопатка падает вниз, собирая пыль и мусор. Для решения проблемы удаления мусора от стен заменяется лопатка, расположенная в передней части робота-пылесоса, на несколько поворотных круговых щеток (рис. 3). Они будут охватывать все неровности пола, перемещая с помощью кругового движения щетины весь мусор от края стенки под всасывающие устройство, тем самых удаляя загрязнения. Робот-пылесос не может удалить всю грязь с пола, потому что кроме пыли и других легко всасываемых веществ есть загрязнения, которые въедаются в материал коврового покрытия пола или же просто засыхают на нем.

Рис. 4. Поворотная щетка
Для отчистки таких проблемных мест необходимо установить в робот-пылесос функцию влажной уборки, которая позволяет очисть поверхность с максимальной эффективностью. Система влажной уборки действует по принципу втягивания пыли, растворенной в воде. Принцип действия акцентируется на рисунке 5. Данная модернизация обеспечила идеальную уборку любых половых поверхностей. В конструкцию робота-пылесоса встраивается модуль голосового управления, который сможет повысить комфорт использования данного рода техники. Такая модернизация увеличивает многофункциональность его использования
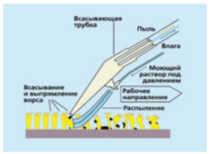
Рис. 5. Принцип действия влажной уборки
Проведенные усовершенствования позволили добиться следующих результатов: повышение качества уборки труднодоступных мест; увеличение качества уборки въевшихся загрязнений; повышение универсальности относительно очищаемых поверхностей; повышение комфорта управления роботом-пылесосом.
Литература:
- Поезжаева Е. В. Концепции развития робототехники // Концепции развития робототехники: учебное пособие // М-во образования и науки Рос. Федерации, Перм. нац. исслед. политехн. ун-т. — Пермь: Изд-во ПНИПУ, 2017. — 437 с. Допущено УМО вузов по образованию в обл. автоматизированного машиностроения (УМО АМ) в качестве учеб. пособия
- Samsung. [Электронный ресурс]. URL: http://www.samsung.com/ru/vacuum-cleaners/vr7070/ (дата обращения 01.12.2017).
