




Анализ плотности распределения радиолокационных средств (РЛС) военного и специального назначения в диапазоне электромагнитных волн представляет непростую задачу. Основная трудность заключается не столько в значительном объеме обрабатываемой информации, сколько в ее закрытости, неполноте и потенциальной недостоверности ввиду сокрытия точных параметров и характеристик военной и специальной техники для сохранения боевого преимущества. Также анализ затрудняется отсутствием сведений о количестве применяемых РЛС. Следует также отметить и тот факт, что для многих РЛС в открытых источниках указан тот или иной диапазон (например, Х-диапазон), который на практике отдельным типом РЛС используется не полностью.
Тем не менее, несмотря на отмеченные особенности, в работе предложена оценка плотности распределения РЛС на основе данных открытой печати. В работе использованы характеристики преимущественно зарубежных РЛС, а также отечественных РЛС, поставленных на вооружение, начиная с 70-х гг. прошлого века, сведения о которых в настоящее время рассекречены.
- За последние 30 лет сфера применения РЛС в технике военного и специального назначения значительно расширилась. При этом важная роль, как и прежде, отводится РЛС, размещенным на носителях воздушного базирования. Такие РЛС используются как в зонах конфликтов, так и в мирных регионах для поддержания устойчивой геополитической обстановки. В районах, граничащих с зонами боевых действий, а также на границах с государствами-потенциальными противниками применяются РЛС дальнего обнаружения с типовой дальностью обнаружения и сопровождения воздушных целей более 600 км. При этом для каждого радиолокатора число сопровождаемых целей может достигать более сотни. По данным [1] в 2014 году уже 23 страны в мире обладали самолетами дальнего радиолокационного обнаружения, также именуемыми в зарубежных источниках AWACS (Airborne EarlyWarning and Control System — авиационная система раннего предупреждения и управления).
За рубежом активно развиваются средства видовой радиолокационной разведки космического базирования (РЛС с синтезированной апертурой (РСА) SARLupe, CosmoSkyMed, TerraSAR-X, Sentinel, PALSAR, RADARSAT и др.), позволяющие получать радиолокационные изображения с разрешением до 0,1 … 0,3 м [2]. Другими особенностями и тенденциями развития РСА являются: улучшение пространственного и радиометрического разрешения, расширение динамического диапазона, уменьшение геометрических искажений радиолокационных изображений; получение дополнительной информации на основе поляриметрической и интерферометрической обработки сигналов [3]; снижение массогабаритных показателей аппаратуры и ее унификация; комплексная обработка РЛИ различных частотных диапазонов.
РЛС успешно используются в борьбе с терроризмом, начиная от дистанционного обнаружения приемопередающих устройств террористов, и заканчивая принудительным подрывом и разминированием взрывных устройств. Особое место в этом направлении занимают устройства, использующие принцип нелинейной радиолокации [4, 5].
Опыт проведения боевых и контртеррористических операций различными странами мира позволяет говорить об использовании беспилотных летательных аппаратов (БЛА), как одного из наиболее эффективных носителей средств радиолокации, минимизирующего потери личного состава [6]. Оснащение дополнительными техническими средствами, а также улучшение летных и грузоподъемных характеристик в значительной степени повышают важность этих средств. На БЛА размещаются и описанные выше РСА, что при отмеченных уже преимуществах БЛА позволяет достичь высокой разрешающей способности, не зависящей от метеоусловий и дальности прямой видимости.
Очевидными следствиями непрерывного расширения области применения средств радиолокации являются расширение номенклатуры и рост количества применяемых РЛС. Для обеспечения электромагнитной совместимости столь различных по назначению радиолокационных средств должны осваиваться новые частотные диапазоны.
Однако ввиду рефракции и поглощения энергии радиоволн атмосферными аэрозолями и молекулами газов удельное затухание сигнала в радиочастотном диапазоне является неравномерным [7]. Вследствие этого плотность распределения используемых РЛС в радиодиапазоне также имеет неравномерное распределение.
Различные РЛС, работающие в одном диапазоне, могут являться взаимными источниками помех. В общем случае вероятность мешающего воздействия РЛС друг на друга тем выше, чем выше плотность распределения используемых типов РЛС и их количество.
В настоящей статье на основе данных открытых источников [8-18] выполнены обзор и систематизация РЛС военного, специального, а также двойного назначения, в том числе РЛС управления оружием, дальнего радиолокационного обнаружения, получения детальных снимков земной поверхности, обнаружения и сопровождения баллистических, космических и аэродинамических целей различных классов в широком диапазоне высот, действующих в составе систем противоракетной обороны, предупреждения о ракетном нападении и контроля космического пространства.
На основе указанных данных получена зависимость плотности распределения РЛС военного и специального назначения в диапазоне частот до 40 ГГц (рис. 1).
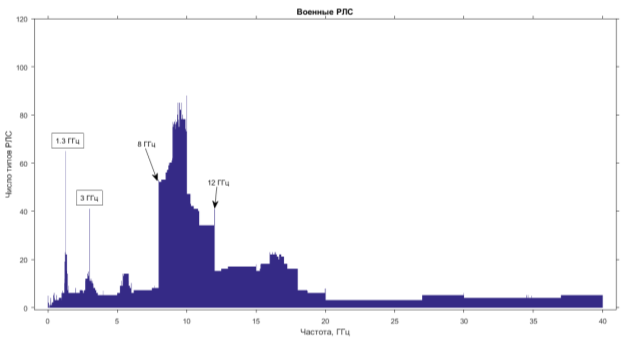
Рис. 1. Плотность распределения различных типов военных РЛС по частотам
Из анализа гистограммы распределения различных типов военных РЛС (рис. 1) видно, что распределение неравномерно. Пик на частоте 1,3 ГГц обусловлен большим количеством РЛС, предназначенных для обнаружения целей, а также распознавания «свой-чужой», разработанных в 1970–1980 годах. На частоте 3 ГГц пик вызван наличием большого количества РЛС, используемых для наблюдения за воздушным пространством, поиска и сопровождения воздушных целей, так же разработанных в 70–80 годы [19, 20]. Наибольшее количество различных типов РЛС представлено в диапазоне от 8 до 12 ГГц, называемом в соответствии с классификацией IEEE Х-диапазоном. Это связано с наличием в этой полосе окна радиопрозрачности атмосферы, для которого характерно относительно невысокое удельное затухание сигнала, что позволяет увеличивать дальность действия РЛС. Так, для воздушных объектов в данном частотном диапазоне она может достигать 600 и более километров, что при современном уровне развития радиоэлектроники практически невозможно, например, в миллиметровом диапазоне. В частности поэтому, как видно из рис. 1, диапазон частот от 12 до 18 ГГц охватывает уже меньшее количество типов РЛС.
Дальность действия РЛС, используемых на частотах выше 18 ГГц, ввиду высокого затухания мала. Однако явным преимуществом этого диапазона являются уменьшенные массогабаритные характеристики элементов СВЧ-тракта [21]. Ввиду отмеченных особенностей радиолокаторы данного частотного диапазона часто используются для оснащения БЛА.
В диапазоне частот выше 20 ГГц работает небольшое количество РЛС, преимущественно предназначенных для сопровождения целей на малых расстояниях и под малым углом. Также в этом диапазоне работают военные РЛС метеорологического назначения, а также некоторые РЛС, предназначенные для картографирования местности [13, 22, 23].
Выполненный в работе анализ позволяет оценить потенциальную насыщенность помеховой обстановки для средств радиолокации, а также сложность сигнальной обстановки для средств радиотехнической разведки [24]. Получение частотных зависимостей распределения РЛС с учетом не только типов, но и количества, а также географии применяемых РЛС является объектом дальнейших исследований авторов.
Литература:
- Самые распространенные летающие радары — самолеты ДРЛОиУ // Военное обозрение. URL: https://topwar.ru/41873-samye-rasprostranennye-letayuschie-radary-samolety-drloiu.html (дата обращения: 4.12.2016).
- Купряшкин И. Ф., Лихачев В. П. Космическая радиолокационная съемка земной поверхности в условиях помех. — Воронеж: Научная книга, 2014. — 460 с.
- Лихачев В. П., Купряшкин И. Ф., Семенов В. В. Поляриметрические и интерферометрические режимы работы РСА в условиях помех. — Воронеж: ВУНЦ ВВС «ВВА», 2014. — 109 с.
- Иркутский О. А., Козачок Н. И., Лихачев В. П., Радько Н. М., Усов Н. А. Дальность обнаружения объектов с нелинейными электрическими свойствами // Наукоемкие технологии. — 2009. — Т. 10. № 12. — С. 40–43.
- Пат. 2382380 РФ. Способ нелинейной радиолокации / В. П. Лихачев, Н. А. Усов // 2010. № 5.
- Лихачев В. П., Рязанцев Л. Б. Использование беспилотных летательных аппаратов для ведения тактической видовой радиолокационной разведки // Военная мысль. № 3. 2016. С. 24–28.
- Перунов Ю. М. Радиоэлектронное подавление информационных каналов систем управления оружием / Ю. М. Перунов, К. И. Фомичев, Л. М. Юдин; под ред. Ю. М. Перунова. — М.: Радиотехника, 2008. — 416 с.
- Кларк Дж. Радиолокационные системы авиационных комплексов дальнего радиолокационного обнаружения // ТИИЭР. — 1985. — № 2. — С. 164–181.
- Комаров А. А., Кондратенков Г. С., Курилов Н. Н., Лавров А. А., Саблин В. Н., Толстов Е. Ф., Федосеев В. С. Радиолокационные станции воздушной разведки. — М.: Воениздат, 1983. — 152 с.
- Верба В. С. Авиационные комплексы радиолокационного дозора и наведения. — М.: Радиотехника, 2008. — 432 с.
- Peter Hoogeboom. Key Principles and Applications Synthetic Aperture Radar // IQPC Conference. — Лондон: 2006. — С. 1–127.
- Lynx Multi-mode Radar // General Atomics Aeronautical. URL: http://www.ga-asi.com/lynx-multi-mode-radar (дата обращения: 25.11.2016).
- Перунов Ю. М., Мацукевич В. В., Васильев А. А. Зарубежные радиоэлектронные средства / Под ред. Ю. М. Перунова. В 4-х книгах. Кн.1: Радиолокационные системы. — М.: Радиотехника, 2010. — 336 с.
- Верба В. С., Неронский Л. Б., Осипов И. Г., Турук В. Э. Радиолокационные системы землеобзора космического базирования. — М.: Радиотехника, 2010. — 680 с.
- Под ред. Подъездкова Ю. А. Космическая съёмка Земли. Космическая радиолокационная съёмка поверхности Земли. — М.: Радиотехника, 2004. — 66 с.
- Соловьёв И. В., Корольков Г. Н., Бараненко А. А., Баранов М. Н., Алексеев А. В., Васильев Л. С., Дзюба В. Г., Корж И. Г., Солодовниченко М. Б., Усвяцов Б. М. Морская радиоэлектроника: Справочник. — СПб.: Политехника, 2003. — 246 с.
- Под ред. Сколника М. И. Справочник по радиолокации / Под ред. М. И. Сколника. Пер. с англ. под общей ред. В. С. Вербы. В 2 книгах. Книга 2. — М.: Техносфера, 2014. — 680 с.
- Ерошенков М. Г. Радиолокационный мониторинг. — М.: МАКС Пресс, 2004. — 452 с.
- US Military Aircraft Equipment // GlobalSecurity.org. URL: http://www.globalsecurity.org/military/systems/aircraft/systems/ (датаобращения: 5.12.2016).
- Air defence radars // The Decca Legacy. URL: http://woottonbridgeiow.org.uk/decca-legacy/chapter7.php (дата обращения: 5.12.2016).
- Подстригаев А. С. Проектирование СВЧ-устройств: Практикум [Текст] + [Электронный ресурс] — Брянск: БГТУ, 2015. — 123 с.
- APQ-175(V) — Archived 11/98 // Forecast International. URL: https://www.forecastinternational.com/archive/disp_old_pdf.cfm?ARC_ID=1571 (дата обращения: 5.12.2016).
- Westinghouse WX-50 radar completes flight trials // FlightGlonal. URL: https://www.flightglobal.com/FlightPDFArchive/1976/1976 %20- %200999.PDF (датаобращения: 5.12.2016).
- Подстригаев А. С. Анализ ведения радиотехнической разведкив условиях сложной сигнальной обстановки // Современные проблемы проектирования, производства и эксплуатации радиотехнических систем: сборник научных трудов. — Ульяновск: УлГТУ, 2016. — С. 49–52.
