




При проектировании микропроцессорных систем управления силовым агрегатом возникает задача контроля положения исполнительного механизма переключения передач, положение рейки топливного насоса высокого давления (ТНВД), акселератора и др.
Для решения этой задачи разработан многопозиционный индуктивный первичный измерительный преобразователь (ПИП) положения — для определения величины и направления перемещения рейки ТНВД и акселератора [1–3].
Для данного ПИП разработан вторичный измерительный преобразователь (ВИП), структурная схема которого изображена на рис. 1.
ВИП работает следующим образом. Импульсы напряжения (прямоугольной или синусоидальной формы) подаются с генератора импульсов через усилитель импульсов на ПИП. При перемещении индуктора изменяются индуктивные составляющие комплексных сопротивлений чувствительных элементов ПИП, а следовательно, и падение напряжения на делителях напряжений (точки 2 и 3), при этом падение напряжения на делителе R1R2 (точка 1) остаётся неизменным и является опорным для компараторов. На рис. 2 представлены диаграммы напряжений в точках 1, 2, 3 на выходах делителей.
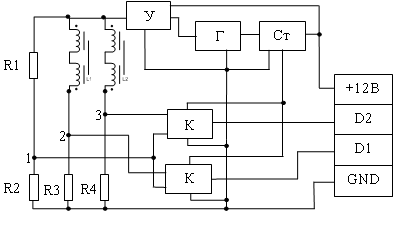
Рис. 1. Структурная схема вторичного измерительного преобразователя многопозиционного датчика положения: К — компаратор; У — усилитель импульсов генератора; ГИ — генератор импульсов; Ст — стабилизатор напряжения
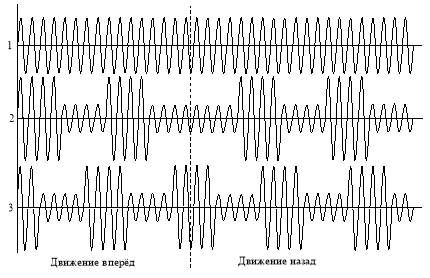
Рис. 2. Диаграммы напряжений
Когда на выходе делителя уровень напряжения выше опорного, на выходе компаратора логическая единица, когда ниже — ноль; т. е. на выходах компараторов мы имеем огибающую напряжений с выходов делителей 1 и 2 (рис. 3). При этом количество импульсов, снимаемых с одного из выходов датчика, пропорционально перемещению, а частота — скорости [1].
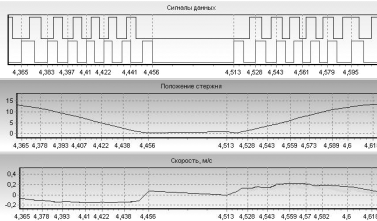
Рис. 3. Результат работы программы
Сигналы данных, показаны на диаграмме напряжений с выходов многопозиционного датчика положения;
Положение стержня — на графике, определяющем зависимость положения индуктора в зависимости от времени (начальное положение считается нулевым);
Скорость на графике, определяющем зависимость скорости индуктора в зависимости от времени.
Данная схема отличается простотой, надёжностью и дешевизной, и практически не требует настройки.
Рассмотренный выше многопозиционный датчик был реализован в «железе» и подключен к ПЭВМ через LPT–порт. Для исследования и обработки результатов изменения комплексного сопротивления многопозиционного датчика положения разработана программа, работающая под WindowsXP\8.1\10, алгоритм работы которой приведена на рис. 4.
Программа работает следующим образом. При запуске чтения данных с порта (рис. 4 точка 1) создаётся три потока: поток чтения, поток кэширования и поток записи. В потоке кэширования выделяется буфер размером 1Мб, куда заносятся данные из потока чтения. Пока значения порта не меняются, в буфер ничего не заносится, как только показания изменились, определяется время изменения значений порта (рис. 4 GetTick). В ОС WinX имеется счётчик времени, но он определяет время с точностью до 0,001с, что недостаточно для корректной обработки сигналов датчика.
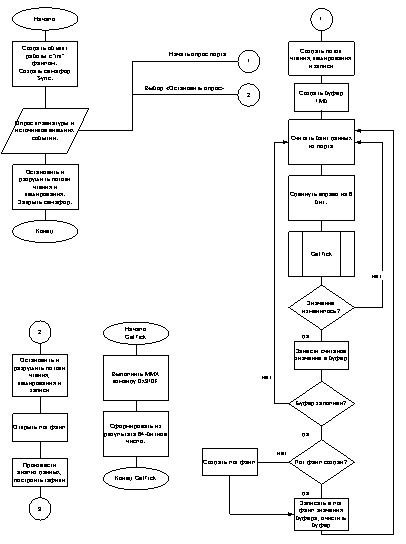
Рис. 4. Алгоритм работы программы
Эта проблема была решена следующим образом. В ядре процессора имеется счётчик «тиков» (один импульс тактового генератора процессора), мы можем считать начальное количество тиков и количество тиков в данный момент времени, тогда изменение времени будет рассчитываться по формуле
где n1 — число тиков в начальный момент времени; n2 — количество тиков в данный момент времени; Т — период одного тика.
При старте программы измеряется количество тиков за 5 с и рассчитывается по формуле
![]() .(2)
.(2)
Число тиков кодируется 64 битами, информация с датчика кодируется двумя битами, поэтому в целях экономии места и ресурса системы последние 2 бита числа тиков заменяются значениями с выхода датчика и уже это значение заносится в буфер, при этом погрешность определения времени составляет 4 нс (при тактовой частоте процессора 1 ГГц). При заполнении буфера считанная информация записывается на жёсткий диск. Этот процесс повторяется, пока идет чтение. При остановке чтения (рис. 4 точка 2) разрушаются потоки чтения, кэширования и записи, открывается созданный файл, идёт анализ значений и построение графиков.
Данный алгоритм разработан для исследования многопозиционного датчика положения, поэтому опрос порта идёт с максимальной скоростью, т. е. насколько позволяет система. В конкретном же случае требуется гораздо меньшая скорость. Так, скорость перемещения рейки ТНВД ≈ 2 м/с, если взять с двойным запасом, т. е. 4 м/с. Следовательно, при длине магнитопроводящего и немагнитопроводящего участков индуктора по 2 мм, с учётом того, что необходим опрос, в два раза быстрее частоты смены участков индуктора (из-за сдвига фаз между чувствительными элементами), требуемая частота опроса датчика, равна:
![]() , кГц(3)
, кГц(3)
где υ — скорость перемещения индуктора, м/с; l — длина магнитопроводящего (немагнитопроводящего) участка индуктора, мм.
В программе имеется возможность задавать размер буфера, параметров порта, название файла данных, перенос файла, открытие файла, а также масштабирование графиков и вывод их на печать.
Литература:
- Патент на полезную модель 97191 Российская Федерация. Индуктивный (трансформаторный) первичный измерительный преобразователь положения / Шаронов Г. И., Шаманов Р. С., Минина Т. И., Шибаков В. Г., Жарин Д. Е. — 2010108986/22; заявл. 12.03.2010; опубл. 27.08.2010. Бюл. № 24.
- Патент на полезную модель 96949 Российская Федерация. Индуктивный (трансформаторный) первичный измерительный преобразователь положения / Шаронов Г. И., Шаманов Р. С., Шаманова Н. И., Шибаков В. Г., Жарин Д. Е. — 2010109022/12; заявл. 12.03.2010; опубл. 20.08.2010. Бюл. № 23.
- Патент на полезную модель 96423 Российская Федерация. Индуктивный (трансформаторный) первичный измерительный преобразователь положения / Шаронов Г. И., Шаманов Р. С., Чураков П. П., Шибаков В. Г., Жарин Д. Е. — 2010109003/28; заявл. 12.03.2010; опубл. 27.07.2010. Бюл. № 21.
