




Адаптивная система управления процессом уплотнения асфальтобетонной смеси
Авторы: Климова Оксана Леонидовна, Климов Алексей Сергеевич, Янаев Евгений Юрьевич
Рубрика: 3. Автоматика и вычислительная техника
Опубликовано в
Дата публикации: 03.06.2016
Статья просмотрена: 76 раз
Библиографическое описание:
Климова, О. Л. Адаптивная система управления процессом уплотнения асфальтобетонной смеси / О. Л. Климова, А. С. Климов, Е. Ю. Янаев. — Текст : непосредственный // Технические науки: проблемы и перспективы : материалы IV Междунар. науч. конф. (г. Санкт-Петербург, июль 2016 г.). — Санкт-Петербург : Свое издательство, 2016. — С. 56-59. — URL: https://moluch.ru/conf/tech/archive/166/10617/ (дата обращения: 26.04.2024).
Постановка проблемы. Асфальтобетонное покрытие нынешних дорог подвержено различным эксплуатационным воздействиям — нагрузки автотранспортных средств, интенсивность движения, истирающее действие колес и т. п. При этом накапливающиеся внутренние напряжения и необратимые деформации, связанные с изменением структуры материала покрытия, способствуют появлению различных дефектов и повреждений (сдвиговые деформации, трещинообразование, выкрашивание и интенсивное изнашивание). Основным критерием повышения эксплуатационных качеств автомобильных дорог является их правильное строительство и ремонт с соблюдением всех технологических требований [1–4]. Но, как показывает практика формирование асфальтобетонных покрытий автомобильных дорог, реконструкция дорожных одежд и ремонтные работы дорог осуществляются с грубыми нарушениями, т. е. выше перечисленные работы выполняются в неблагоприятные погодные условия с нарушением технологических требований, что снижает сохранность и эксплуатационные качества автомобильных дорог в 3–5 раз [5–9]. Поэтому строительство, эксплуатация и ремонт асфальтобетонных дорог требуют огромных инвестиций.
Цель научной работы. Разработать систему автоматического управления процессом уплотнения асфальтобетонной смеси для повышения качества асфальтобетонных покрытий автомобильных дорог на основе результатов теоретических исследований по автоматизации основных процессов с применением современных информационных технологий.
В качестве прототипа принята система автоматического управления рабочего органа асфальтоукладчика, содержащая датчик углового положения с индикатором ошибки и переключателями задатчика стабилизируемого угла, датчик высотного положения с индикатором ошибки, блок управления, дискретные гидравлические приводы и тензометрический преобразователь усилия в металлоконструкции трамбующего бруса [10].
Недостатком прототипа является низкая эффективность системы автоматического цифрового управления, обусловленная тем, что степень уплотнения асфальтобетонной смеси в процессе ее уплотнения контролируется тензометрическим преобразователем усилия в металлоконструкции трамбующего бруса, кроме того, в системе отсутствует адаптивный (сенсорный) датчик на раме рабочего органа асфальтоукладчика для мгновенного реагирования на изменение какого-либо фактора окружающей среды и технологического процесса, блок фазификатор для перевода исходных данных с датчиков, контролирующих управляющий процесс, в значения лингвистических переменных, блок адаптивного управления для реализации процедуры нечеткого вывода на множестве продукционных правил, составляющих базу знаний системы управления, в результате чего формируются выходные лингвистические значения, блок дефазификатор для перевода лингвистических значений в точные значения результатов вычислений и формирования управляющих воздействий, подаваемых на дискретные гидравлические приводы, что снижает точность автоматического цифрового управления и приводит к длительному процессу укладки дорожного полотна во времени, значительному сокращению срока службы асфальтобетонного покрытия и снижению производительности дорожно-строительных работ.
Задачей изобретения является повышение эффективностицифровой адаптивной системы управления процессом уплотнения асфальтобетонной смеси за счет применения сенсорного датчика на раме рабочего органа асфальтоукладчика, обеспечивающего мгновенное реагирование на изменение какого-либо фактора окружающей среды и технологического процесса, блока фазификатора, обеспечивающего перевод исходных данных с датчиков, контролирующих управляющий процесс, в значения лингвистических переменных, блока адаптивного управления, обеспечивающего реализацию процедуры нечеткого вывода на множестве продукционных правил, составляющих базу знаний системы управления, в результате чего формируются выходные лингвистические значения, блока дефазификатора, обеспечивающего перевод лингвистических значений в точные значения результатов вычислений и формирование управляющих воздействий, подаваемых на дискретные гидравлические приводы, а также повышение точности цифрового адаптивного управления и значительное сокращение процесса укладки дорожного полотна во времени, увеличение срока службы асфальтобетонного покрытия и производительности дорожно-строительных работ.
Для решения поставленной задачи цифровая адаптивная система управления процессом уплотнения асфальтобетонной смеси содержит датчик углового положения 1, имеющий индикатор ошибки и переключателями задатчика стабилизируемого угла, датчик высотного положения 2, имеющий индикатор ошибки, тензометрический преобразователь усилия 3, сенсорный датчик 4, блок «фазификатор» 5, блок адаптивного управления 6, блок «дефазификатор» 7 и дискретные гидравлические приводы 8. Датчик углового положения 1 вырабатывает сигнал ошибки, пропорциональный величине отклонения рабочего органа асфальтоукладчика от гравитационной вертикали. Сигнал ошибки поступает с выхода датчика углового положения 1 на первый вход блока «фазификатор» 5. Датчик высотного положения 2 вырабатывает сигнал ошибки, пропорциональный величине отклонения рабочего органа от положения, заданного копиром. Сигнал ошибки поступает с выхода датчика высотного положения 2 на второй вход блока «фазификатор» 5. Тензометрический преобразователь усилия 3 вырабатывает сигнал, пропорциональный усилию в металлоконструкции трамбующего бруса, который поступает с выхода тензометрического преобразователя усилия 3 на третий вход блока «фазификатор» 5. Сенсорный датчик 4, установленный на раме рабочего органа асфальтоукладчика, вырабатывает сигнал, пропорциональный изменению какого-либо фактора окружающей среды и технологического процесса, который поступает с выхода сенсорного датчика 4 на четвертый вход блока «фазификатор» 5. Блок «фазификатор» 5 переводит исходные данные с датчиков, контролирующих управляющий процесс, в значения лингвистических переменных, для блока адаптивного управления 6. Блок адаптивного управления 6 реализует процедуры нечеткого вывода на множестве продукционных правил, составляющих базу знаний системы управления, в результате чего формируются выходные лингвистические значения для блока «дефазификатор» 7. Блок «дефазификатор» 7 переводит лингвистические значения в точные значения результатов вычислений и формирует управляющие воздействия, подаваемые на дискретные гидравлические приводы 8 для сведения текущих ошибок к нулю. Длительность и частота управляющих сигналов зависит от величины ошибки [11].
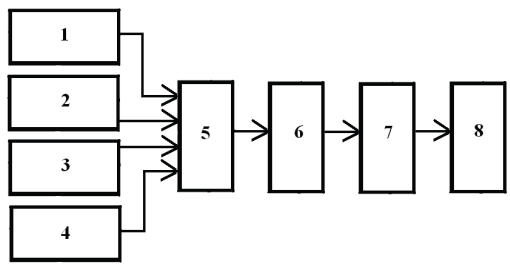
Рис. 1. Функциональная схема расположения блоков цифровой адаптивной системы управления процессом уплотнения асфальтобетонной смеси
На рисунке 1 приведена функциональная схема расположения блоков цифровой адаптивной системы управления процессом уплотнения асфальтобетонной смеси.
Заключение. Таким образом, преимущество нового технического решения заключается в повышении эффективности цифровой адаптивной системы управления процессом уплотнения асфальтобетонной смеси вследствие непрерывного процесса устройства дорожного полотна, за счет применения сенсорного датчика на раме рабочего органа асфальтоукладчика, обеспечивающего мгновенное реагирование на изменение какого-либо фактора окружающей среды и технологического процесса, блока «фазификатор», обеспечивающего перевод исходных данных с датчиков, контролирующих управляющий процесс, в значения лингвистических переменных, блока адаптивного управления, обеспечивающего реализацию процедуры нечеткого вывода на множестве продукционных правил, составляющих базу знаний системы управления, в результате чего формируются выходные лингвистические значения, блока «дефазификатор», обеспечивающего перевод лингвистических значений в точные значения результатов вычислений и формирование управляющих воздействий, подаваемых на дискретные гидравлические приводы, что в целом свидетельствует о повышении точности цифрового адаптивного управления и значительном сокращении процесса укладки дорожного полотна во времени, увеличение срока службы асфальтобетонного покрытия и производительности дорожно-строительных работ.
Литература:
- Климов, А. С. Автоматизация процесса формирования асфальтобетонного покрытия дороги [Текст]: автореф. дис.... канд. техн. наук: 05.13.06 / А. С. Климов; [Сибирский федеральный университет]. — Красноярск, 2010. — 21 с.
- Климов, А. С. Автоматизация процесса формирования асфальтобетонного покрытия дороги [Текст]: дис.... канд. техн. наук / А. С. Климов. — Красноярск, 2010. — 122 с.
- Система автоматического управления винтового шнека асфальтоукладчика [Текст]: пат. 116507 Рос. Федерация: МПК Е01C19/48 / Климов А. С., Климов С. С., Шилкин С. В.; заявитель и патентообладатель Красноярск, Сибирский федеральный университет. — № 2011154625/03; заявл. 30.12.2011; опубл. 27.05.2012, Бюл. № 15. — 6 с.
- Система автоматического управления процессом уплотнения асфальтобетонной смеси [Текст]: пат. 119350 Рос. Федерация: МПК Е01C23/07 / Климов А. С., Климов С. С.; заявитель и патентообладатель Красноярск, Сибирский федеральный университет. — № 2012109050/03; заявл. 11.03.2012; опубл. 20.08.2012, Бюл. № 23. — 8 с.
- Климов, А. С. Совершенствование систем автоматического управления процессами формирования асфальтобетонной смеси [Текст] / А. С. Климов, О. Л. Климова, С. С. Климов//Строительные и дорожные машины. — Москва: Издательство технической литературы «СДМ-Пресс» — 2013. — № 12. — С. 38–42.
- Система управления процессом формирования асфальтобетонной смеси [Текст]: материалы VII междунар. науч.-практ. конф. "Наука в современном информационном обществе, 09–10 ноября, 2015 North Charleston, USA/ CreateSpace. — North Charleston, USA: н.-и. ц. «Академический», 2015. — 246 с.
- Климов, А.С. Повышение эффективности строительства внутрихозяйственных автомобильных дорог в сельскохозяйственных предприятиях и организациях[Текст] / А. С. Климов, О. Л. Климова и др.// Вестник КрасГАУ. — Красноярск, 2015. − Выпуск 4 (103). — С. 33 − 37.
- Климов, А. С. Совершенствование устройства для нанесения разделительных полос и сложных изображений больших размеров на дорожное полотно [Текст] / А. С. Климов, О. Л. Климова// Механизация строительства. — Москва: Общество с ограниченной ответственностью Издательский дом «БИБЛИО-ГЛОБУС» — 2015. — № 12. — С. 16–18.
- Климов, А. С. Реализация системы автоматического управления асфальтоукладчика для уплотнения асфальтобетонной смеси [Текст] / А. С. Климов, О. Л. Климова и др.// Механизация строительства. — Москва: Общество с ограниченной ответственностью Издательский дом «БИБЛИО-ГЛОБУС» — 2016. — № 4. — С. 48–51.
- Система автоматического управления рабочего органа асфальтоукладчика [Текст]: пат. 95688 Рос. Федерация: МПК Е02F9/20 / Климов А. С., Климов С. С. и др.; заявитель и патентообладатель Красноярск, Сибирский федеральный университет. — № 2010106464/22; заявл. 24.02.2010; опубл. 10.07.2010, Бюл. № 19. — 6 с.
- Цифровая адаптивная система управления процессом уплотнения асфальтобетонной смеси [Текст]: пат. 2499095 Рос. Федерация: МПК Е01C23/07 / Климов А. С., Климов С. С. и др.; заявитель и патентообладатель Красноярск, Сибирский федеральный университет. — № 2012114326/03; заявл. 11.04.2012; опубл. 20.11.2013, Бюл. № 32. — 8 с.
Похожие статьи
Использование датчиков адаптивного управления для...
Отличительной чертой адаптивной системы управления для достижения высокой точности при обработке детали на токарном станке с ЧПУ является корректирование приводов исполнительных рабочих частей станка по текущей информации о подконтрольных процессах...
Роботизация строительно-дорожных машин | Статья в журнале...
автоматическое управление, GPS, датчик, датчик поворота отвала, рабочий орган, рабочий орган машины, система
Проектирование и документирование встроенного программного обеспечения вторичных преобразователей тензометрических датчиков давления.
Калибровка роботов | Статья в журнале «Молодой ученый»
Ключевые слова. система управления, калибровка, датчики.
Датчик цвета и программный блок датчика. Области корректной работы датчика.
Большинство из них имеет адаптивное программное управление, в котором программа.
Нейронные сети в системах управления процессами...
Ключевые слова: обогатительная фабрика, адаптивная система управления, нейроподобная сеть, радиально-базисная функция.
Расход промпродукта, поступающего на измельчение, измеряется автоматическими тензометрическими конвейерными весами типа ЛТМ-1М, 4561К...
Модель адаптивной системы управления и ее применение для...
В данной работе предлагается модель адаптивной системы управления, основанная на
На вход функциональной системы подается также информация об окружающей среде в виде набора значений сенсорных предикатов , описывающих текущую ситуацию.
Синтез регулятора системы управления электроприводами...
Адаптивная система управления гибкозвенным манипулятором...
Исследование нелинейной системы «Преобразователь частоты...» ...звена регулятора скорости; передаточный коэффициент преобразователя частоты; коэффициент обратной связи по скорости.
Алгоритмы коррекции погрешностей тензометрических датчиков...
Управление и диагностика элементов интеллектуальных датчиков...
Структуры цифровых вторичных преобразователей тензометрических датчиков давления.
Автономная система позиционирования в составе управления...
Вход / Регистрация.
За положение относительно трех осей отвечает система стабилизации, работающая, как правило, на
Это связано с невозможностью прямого влияния на углы наклона платформы (исключение адаптивная подвеска, но она встречается редко) в связи их прямой...
Похожие статьи
Использование датчиков адаптивного управления для...
Отличительной чертой адаптивной системы управления для достижения высокой точности при обработке детали на токарном станке с ЧПУ является корректирование приводов исполнительных рабочих частей станка по текущей информации о подконтрольных процессах...
Роботизация строительно-дорожных машин | Статья в журнале...
автоматическое управление, GPS, датчик, датчик поворота отвала, рабочий орган, рабочий орган машины, система
Проектирование и документирование встроенного программного обеспечения вторичных преобразователей тензометрических датчиков давления.
Калибровка роботов | Статья в журнале «Молодой ученый»
Ключевые слова. система управления, калибровка, датчики.
Датчик цвета и программный блок датчика. Области корректной работы датчика.
Большинство из них имеет адаптивное программное управление, в котором программа.
Нейронные сети в системах управления процессами...
Ключевые слова: обогатительная фабрика, адаптивная система управления, нейроподобная сеть, радиально-базисная функция.
Расход промпродукта, поступающего на измельчение, измеряется автоматическими тензометрическими конвейерными весами типа ЛТМ-1М, 4561К...
Модель адаптивной системы управления и ее применение для...
В данной работе предлагается модель адаптивной системы управления, основанная на
На вход функциональной системы подается также информация об окружающей среде в виде набора значений сенсорных предикатов , описывающих текущую ситуацию.
Синтез регулятора системы управления электроприводами...
Адаптивная система управления гибкозвенным манипулятором...
Исследование нелинейной системы «Преобразователь частоты...» ...звена регулятора скорости; передаточный коэффициент преобразователя частоты; коэффициент обратной связи по скорости.
Алгоритмы коррекции погрешностей тензометрических датчиков...
Управление и диагностика элементов интеллектуальных датчиков...
Структуры цифровых вторичных преобразователей тензометрических датчиков давления.
Автономная система позиционирования в составе управления...
Вход / Регистрация.
За положение относительно трех осей отвечает система стабилизации, работающая, как правило, на
Это связано с невозможностью прямого влияния на углы наклона платформы (исключение адаптивная подвеска, но она встречается редко) в связи их прямой...




