




Аналитический обзор развития робототехники, оценка возможности применения для робототехнического зрения ПЗС-матриц

Автор: Мамелин Юрий Валерьевич
Рубрика: 3. Автоматика и вычислительная техника
Опубликовано в
III международная научная конференция «Актуальные вопросы технических наук» (Пермь, апрель 2015)
Дата публикации: 11.04.2015
Статья просмотрена: 101 раз
Библиографическое описание:
Мамелин, Ю. В. Аналитический обзор развития робототехники, оценка возможности применения для робототехнического зрения ПЗС-матриц / Ю. В. Мамелин. — Текст : непосредственный // Актуальные вопросы технических наук : материалы III Междунар. науч. конф. (г. Пермь, апрель 2015 г.). — Пермь : Зебра, 2015. — С. 57-59. — URL: https://moluch.ru/conf/tech/archive/125/7798/ (дата обращения: 26.04.2024).
За последнее десятилетие в повседневной жизни человечества стали обыденными такие вещи как роботы пылесосы, автономные газонокосилки, различные Android(ы) способные к обучению (NOA). По статистическим подсчетам до 2025 года робототехника сделает громадный скачок и её объём вырастет более чем на сто процентов от нынешнего состояния робототехники в мире.
Россия в настоящие время стоит на этапе становления роботостроения и робототехники. Для привлечения общественности проводятся выставки и экспозиции роботов, которые достигнуты, как во всем мире, так и в России. Стоит отметить, что в последние годы для развития робототехники различные Российские фонды учредили множество грантов и стипендий для студентов и молодых ученых.
Проводятся соревнования по робототехнике, наиболее распространенными дисциплинами таких соревнований: робот следующий по линии, робот баскетболист, робот спасатель (МЧС), робот погрузчик, робофутбол и многое другое. Такие соревнования направлены на то, чтобы студенты и школьники заинтересовались такими вещами как роботостроение и робототехника. Развевали свои решения данной проблемы, старались, как то усовершенствовать и доработать уже имеющиеся решения.
Одной из проблем, которая встречается у робототехнических платформ, это позиционирование робота относительно каких-то линий, будь то границы игрового поля для робофутбола или специализированная разметка для определения места броска в робобаскетболе. Если для приведенных выше дисциплин актуальны довольно небольшие скорости, то для робота, следующего по линии скорость робота должна быть в разы больше порядка 1,5 м/с, а на соревнованиях международного уровня скорость достигает и 3 м/с.
Рассматриваются различные методы решения данной проблемы это:
- Использование фотодатчиков (оптопары или набор из фототранзистора и светодиода одного спектрального диапазона).
- Обработка видеосигнала.
- Применение различных ПЗС матриц, таким может быть сенсор ADNS-2610 («используемый в оптических мышках» имеет небольшую встроенную ПЗС-матрицу, данные с которой позволят определять цвет поверхности под роботом).
Эти методы довольно эффективны и применяются для различных целей в робототехнике. Но для определения любого цвета поверхности отличного от черного необходимо использование четко настроенного на этот цвет фотодатчика с применение светофильтра. Если для этих целей использовать видеокамеру, то становится вопрос о громадных кодах по обработке видеосигнала и подборке контроллера, способного его обработать с высокой продуктивностью.
Небольшая ПЗС — матрица из оптической мыши со всей уверенностью способна справляться с данной задачей на высоком уровне, но тут возникают следующие проблемы:
- Ухудшение качества изображения при увеличении расстояния от поверхности до матрицы (неровности поверхности).
- Способность определения только черного цвета.
Альтернативное решение этой проблемы можно получить, используя принцип работы ПЗС технологии с высокой концентрацией пикселей на дюйм (линейка на принципе зарядовой связи). ПЗС — это технологии, которые начали развиваться вскоре после того, как был изобретен транзистор, а в 1970 г. был предложен и продемонстрирован экспериментально принцип зарядовой связи.
Впервые принцип ПЗС с идеей сохранять и затем считывать электронные заряды был разработан двумя инженерами корпорации BELL в конце 60-х годов в ходе поиска новых типов памяти для ЭВМ, способных заменить память на ферритовых кольцах. Эта идея оказалась бесперспективной, но была замечена способность кремния реагировать на видимый спектр излучения. Мысль использовать этот принцип для обработки изображений, получила своё развитие.
С 1970 г. ПЗС технологии широко шагнули вперёд и ныне приборы с числом элементов 4096×4096 и с квантовым выходом около 90 % уже не являются экзотикой. В настоящие время они используются во многих устройствах, которые мы используем в быту (цифровой фотоаппарат, видеокамера, оптическая мышь, различные сканеры).
К основным характеристикам ПЗС, стоит отнести их спектральные характеристики зависимость выходного сигнала от длины волны, или, что эквивалентно, на квантовом выходе — количество фотоэлектронов на один фотон падающего излучения.
В теории спектральную характеристику (СХ) ПЗС можно определить, по двум факторам:
1. Прохождение света через электродную структуру
2. Фотогенерация, вызванная поглощением света непосредственно в полупроводнике (внутренний квантовый выход).
Фотогенерацию вызывают только фотоны с энергией, превышающей ширину запрещённой зоны — около 1,2 эВ (что соответствует длине волны чуть больше 1,05 мкм — это ближний ИК диапазон). Фотоны с большей длиной волны просто не поглощаются и соответственно не дают вклада в выходной сигнал, а длина ~1,05 мкм оказывается красной границей фотоэффекта в кремнии. При уменьшении длины волны коэффициент поглощения постепенно растёт; так, при l = 1 мкм свет затухает в е раз на 100 мкм, при l = 0,7 мкм (красный цвет) — на 5 мкм, а при l = 0,5 мкм (зелено-голубой) — на 1 мкм.
Пропускание света электродной структурой предполагает, что свет, попадает в полупроводник, проходя через несколько слоёв, которые имеют различные оптические характеристики. Так что неизбежна интерференция падающего света, однако толщина этих слоёв соизмерима с длиной волны. Далее поликристаллический кремний, из которого сделаны электроды, совершенно не прозрачен в области длин волн до 430–450 нм (синий и фиолетовый цвета).
Существует две основные технологии светочувствительных элементов основанных на принципе зарядовой связи это:
- CCD — представляет собой полоску светочувствительных элементов
- CIS «Contact Image Sensor»
Работа по CCD принципу.
Каретка движется по специальным желобам и в процессе её движения, свет от лампы отражается от сканируемого носителя и проходя через сложную систему зеркал и линз, поступает на светочувствительные элементы, которые формируют элемент изображения в данном положении. После того как каретка проходит под всем носителем сканер составляет общую картину из последовательно «сложенных» элементов — изображение носителя. Преимущества и недостатки характеристик CCD технологии над CIS технологией приведены в табл. 1.
CIS — технология осуществляется следующим образом.
Каретка небольших габаритов (Рис1), установленная на желоба в которой содержится линейка одинаковых фотодатчиков, которые расположены по всей ширине рабочего поля сканирования, непосредственно воспринимающих световой поток от оригинала.
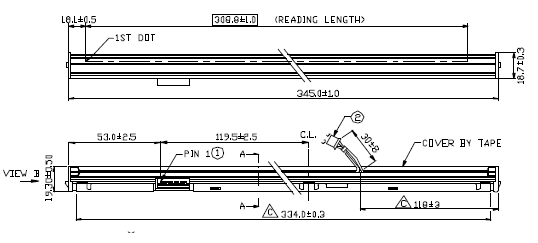
Рис. 1. Чертёж сканера основанного на CIS принципах
Принципиальное преимущества этого принципа отсутствие зеркал, преломляющих призм и объективов.
Таблица 1
Charge — Coupled Device и Charge — Coupled Device таблица сравнений.
|
№ |
Сравниваемая характеристика |
(CCD) Charge — Coupled Device |
(CIS) Charge — Coupled Device |
|
1 |
Глубина резкости |
+/-3 мм) |
(+/-0.3мм) |
|
2 |
Размеры и вес |
Сложная система зеркал приводит к усложнению конструкции, и увеличении чувствительности в вибрации. |
Отсутствие оптической системы и зеркал позволяет CIS сканерам иметь минимальные габариты |
|
3 |
Чувствительность к оттенкам |
+/-20 %, |
+/-40 % |
|
4 |
Разрешающая способность |
3000 dpi |
300 dpi |
|
5 |
Затраты на производство |
CIS-элементы заменяют целый набор компонентов сканера, уменьшая стоимость производства. |
- |
Исходя, из вышесказанного подведем итоги:
1. Изучение спектральной характеристики ПЗС-матрицы или ПЗС-линейки, позволит четко и с высокой скоростью выделять одну определенную спектральную линию, не используя дополнительных светофильтров.
2. Компактность и отсутствие дополнительного питания, системы зеркал и объективов у CIS сканеров позволит использовать их для движения, с высокими скоростями сохраняя малые габариты робототехнической платформы.
3. Высокая концентрация фоточувствительных элементов расположенных в ряд позволяет наиболее точно определять сход с линии, даже на малейшее расстояние.
4. Наличие встроенной подсветки предполагает отсутствие внешних надстроек в виде светофильтров.
В дальнейшем планируется глубокое изучение СХ ПЗС линеек, разработка оптимальной схемы подключения к микроконтроллеру с целью обработки получаемой информации. Написание программы и библиотек для оптимизации кода в различных средах разработки (arduino, CooCox и др).
Литература:
1. http://shop.robotslab.com/products/nao-h25
2. Основные характеристики ФПЗС: http://studopedia.net/2_38790_osnovnie-harakteristiki-fpzs.html
3. Сканеры: виды, устройство, принципы работы: http://xreferat.ru/33/3979–2-skanery-vidy-ustroiystvo-principy-raboty.html
4. Разрешающая способность планшетного сканера: http://texttotext.ru/laboratornaya-rabota/laboratornaya-rabota-4/page-3.html
5. http://www.videoton.ru/Articles/HDTV/1080i.html
Похожие статьи
Механизмы ослабления сигналов, используемых в процессах...
Анализ проблем квантовой линии связи в криптографии.
Указанные трудности устраняются с помощью оптических квантовых усилителей на активных волокнах.
Управление спектральным составом выходного сигнала при...
Квантовая парадигма в системе нового психологического знания
квантовая механика, квантовая криптография, частица, квантовое состояние, эта, квантовая частица, квантовая система, квантовый шум, секретный ключ, квантовая линия связи.
Применение и перспективы использования легированных...
В результате снижается порог генерации и повышается квантовый выход.
2) наличие у ионов метастабильных энергетических электронных уровней; 3) соответствие длины волны оптического сигнала полосе флюоресценции.
Определение физических параметров радиационных процессов...
«Оптическая и квантовая электроника», Москва, Высшая школа, 2001. с. 107–151.
длина волны, лазерное излучение, индуцированное излучение, волокно, Черенковское
Мырова Л. О., Попов В. Д., Верхотуров В. И. Анализ стойкости систем связи к воздействию излучений.
Обзор аппаратных средств, необходимых для систем...
Лазерные диоды и светодиоды доступны только для дискретных или относительно узких диапазонов длин волн, поэтому системы, способные к
Детекторы также широко варьируются и включают приборы с зарядовой связью (ПЗС, англ. CCD), ПЗС с усилителем изображения (в...
Особенности распространения радиоволн на космических линиях...
Основные термины (генерируются автоматически): частота сигнала, Солнечная система, доплеровский
Принципы преобразования электромагнитной... Стивен Спилберг — режиссер знаменитых «Космических
Влияние запаздывания сигналов на космических линиях связи на...
Исследование фотолюминесценции коллоидных квантовых точек...
В качестве источника возбуждения применялся полупроводниковый лазер с длиной волны 445 нм (Nichia NDB7875).
Оптические фильтры на основе наноструктур с квантовыми точками.
Время пролета многозарядных ионов, расположенных на масс-зарядовым спектре, обратно...
Возможность повышения чувствительности волоконного датчика...
Первые работы, в которых особенности в спектре генерации оптических квантовых
1 — активный элемент; 2 — абсорбционная кювета; 3 — зеркала резонатора; 4 — спектрограф; 5 — приёмник излучения.
Если размер частицы больше примерно 1/10 длины волны...
Преимущества рубидиевых стандартов частоты | Статья в журнале...
Квантовые стандарты частоты. КСЧ представляют собой источники сигналов с эталонными частотами. В этих приборах используются физические принципы, при которых значение и неизменность во времени частоты выходных сигналов определяются стабильностью частот...
Похожие статьи
Механизмы ослабления сигналов, используемых в процессах...
Анализ проблем квантовой линии связи в криптографии.
Указанные трудности устраняются с помощью оптических квантовых усилителей на активных волокнах.
Управление спектральным составом выходного сигнала при...
Квантовая парадигма в системе нового психологического знания
квантовая механика, квантовая криптография, частица, квантовое состояние, эта, квантовая частица, квантовая система, квантовый шум, секретный ключ, квантовая линия связи.
Применение и перспективы использования легированных...
В результате снижается порог генерации и повышается квантовый выход.
2) наличие у ионов метастабильных энергетических электронных уровней; 3) соответствие длины волны оптического сигнала полосе флюоресценции.
Определение физических параметров радиационных процессов...
«Оптическая и квантовая электроника», Москва, Высшая школа, 2001. с. 107–151.
длина волны, лазерное излучение, индуцированное излучение, волокно, Черенковское
Мырова Л. О., Попов В. Д., Верхотуров В. И. Анализ стойкости систем связи к воздействию излучений.
Обзор аппаратных средств, необходимых для систем...
Лазерные диоды и светодиоды доступны только для дискретных или относительно узких диапазонов длин волн, поэтому системы, способные к
Детекторы также широко варьируются и включают приборы с зарядовой связью (ПЗС, англ. CCD), ПЗС с усилителем изображения (в...
Особенности распространения радиоволн на космических линиях...
Основные термины (генерируются автоматически): частота сигнала, Солнечная система, доплеровский
Принципы преобразования электромагнитной... Стивен Спилберг — режиссер знаменитых «Космических
Влияние запаздывания сигналов на космических линиях связи на...
Исследование фотолюминесценции коллоидных квантовых точек...
В качестве источника возбуждения применялся полупроводниковый лазер с длиной волны 445 нм (Nichia NDB7875).
Оптические фильтры на основе наноструктур с квантовыми точками.
Время пролета многозарядных ионов, расположенных на масс-зарядовым спектре, обратно...
Возможность повышения чувствительности волоконного датчика...
Первые работы, в которых особенности в спектре генерации оптических квантовых
1 — активный элемент; 2 — абсорбционная кювета; 3 — зеркала резонатора; 4 — спектрограф; 5 — приёмник излучения.
Если размер частицы больше примерно 1/10 длины волны...
Преимущества рубидиевых стандартов частоты | Статья в журнале...
Квантовые стандарты частоты. КСЧ представляют собой источники сигналов с эталонными частотами. В этих приборах используются физические принципы, при которых значение и неизменность во времени частоты выходных сигналов определяются стабильностью частот...




