




Проведён краткий обзор мобильных роботов, используемых в сфере обеспечения безопасности, в сельском хозяйстве и в сфере обслуживания, таких как: LAURON 5, iC Hexapod, BoniRob и BigDog. Сформулированы главные принципы организации системы управления движением мобильного робота на основе рассмотренных в статье робототехнических систем. Рассмотрены наиболее популярные подходы к решению проблемы навигации автоматизированных систем в недетерминированных условиях реального мира и сформулированы основные недостатки применения каждого из подходов. Отмечена необходимость повышения автономности бортовых систем и предложено решение проблемы обработки большого потока информации в реальном времени на основе комплексного подхода.
Ключевые слова: мобильный робот, системы навигации робота, модульная архитектура робототехнических систем.
Conducted a brief review of mobile robots used in the field of security, in agriculture and in the service sector, such as: LAURON 5, iC Hexapod, BoniRob and BigDog. Formulated the basic organization principles of the mobile robot movement control on the basis of robotic systems, discussed in this article. Consider the most popular approaches to solving the problem of navigating automated systems in non-deterministic real-world conditions and formulated the basic disadvantages of each approach. The necessity to increase the autonomy of onboard systems and provides a solution to the problem of handling the huge flow of video in real time through an integrated approach..
Keywords: mobile robot, robot navigation systems, modular architecture of robotics systems.
Введение
В 21-ом веке мобильные робототехнические системы повсеместно интегрируются в самые разные отрасли. В сфере обслуживания требуются роботы-курьеры, образовательные роботы, роботы-консультанты и интеллектуальные пылесосы. В сфере обеспечения безопасности робототехнические системы применяются для обеспечения круглосуточного наблюдения и охраны. В сельском хозяйстве для автоматизации используются различные полевые роботы. В связи с возросшей сложностью операций, перекладываемых на РТС, особо остро стоит проблема решения задачи навигации автоматизированных систем без участия человека, так как необходимо добиться уверенного перемещения мобильного робота в недетерминированных условиях реального мира.
Наиболее популярный подход для решения проблемы навигации заключается в загрузке в запоминающее устройство робота локальной карты местности и в снабжении робота системой спутникового позиционирования [1]. Но при таком решении задачи навигации, система жестко связана с работой спутника, и в случае блокировки GPS или ГЛОНАСС робот фактически лишится ориентации в пространстве. Поэтому, бортовой модуль навигации мобильного робота должен так же уметь строить маршрут и управлять параметрами движения на основании данных, полученных от бортовых сенсоров, например от инфракрасных и ультразвуковых дальномеров, датчиков давления, камеры и т. д.
Современные системы навигации разрабатывают на основе взаимосвязанных модулей, объединяя механизмы управления на низшем уровне и общее планирование маршрута. Выделяют два основных подхода к построению системы навигации: использование централизованной или распределённой архитектуры управления. При централизованном управлении, все вычисления, необходимые для генерации входного вектора управления перемещением робота выполняются на одном компьютере. В зависимости от поставленной задачи, вычислительные мощности, скорость вычислений, и аппаратные ресурсы компьютера, необходимого для осуществления централизованного управления, могут быть слишком затратными, либо вообще экономически неосуществимыми.
В распределенной системе управления, вместо одного главного контроллера, используют индивидуальные контроллеры для управления движением каждой конечности либо отдельными суставами конечности робота. Распределенное управление может быть реализовано на базе одноплатного компьютера или на распределенной вычислительной платформе, состоящей из различных мелких компьютеров, подключенных в единую сеть. В такой системе управляющий контроллер координирует работу подключенных к нему МК, отдельные контроллеры могут так же сотрудничать друг с другом в однораноговой сети. Проблемы, непосредственно связанные с движением на текущем коротком отрезке маршрута, решаются модулем управления и координации движения, а глобальная система следит за соблюдением общего плана, и, в случае отклонения, корректирует маршрут движения, а также синхронизирует работу всех подчиненных структур управления [2]. В настоящее время, использование распределенной системы управления роботом позволяет резкого снизить стоимость навигационного комплекса и всей РТС в целом, а также даёт возможность создать автономную бортовую систему навигации, решающую задачу передвижения в реальном времени. Далее в статье мы рассмотрим перспективные реализации мобильных роботов с распределённой бортовой системой навигации.
Обзор мобильных роботов с бортовой системой навигации
Обзор конструкций и систем технического зрения начнем с шагающего робота LAURON (рис. 1). Он был разработан для изучения и анализа устойчивости передвижения робота по пересеченной местности. Конструкция робота приближена к строению насекомого — Lauron оснащён 6 конечностями, закреплёнными на алюминиевом каркасе, удерживающем необходимую электронику. Каждая из 6-ти ног приводится в действие 4-мя суставами, а голова робота может перемещаться в 2-х направлениях. В сумме это даёт Lauron’у 26 степеней свободы [3]. Благодаря надежной механической конструкции, нескольким типам походок и большому числу степеней свободы, LAURON может сохранять стабильное передвижение даже в экстремальных условиях. Благодаря гибкой системе управления, LAURON способен хорошо адаптироваться к неизвестным ситуациям.
LAURON оснащен несколькими системами датчиков. Каждая конечность снабжена датчиком давления и пружинной системой. В сочетании с измерениями тока двигателя эти две компоненты используются для обнаружения столкновений и контакта конечностей с поверхностью. Кроме того, каждый двигатель оснащен высокоточным кодером, который позволяет получить текущий угол соединения [4].
Ориентация и положение робота измеряются с помощью GPS-датчика, а две системы камер (стерео камеры и ИК-камера), установленные на голове робота, предоставляют информацию о его окружении. На задней панели LAURON имеет панорамную камеру для теле-операционных задач. Эта камера предоставляет оператору хороший обзор робота в режиме реального времени. При использовании очков дополненной реальности, оператор может видеть дополнительную информацию о состоянии робота, которая накладывается на изображения с камер и отображается в очках.
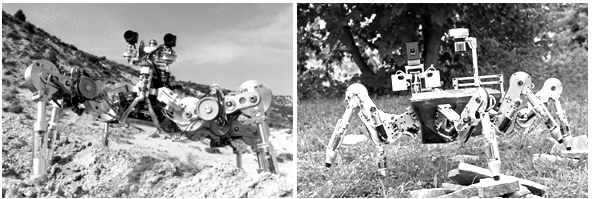
Рис. 1. Робот LAURON 3 (1999 г.), LAURON 4 (2004)
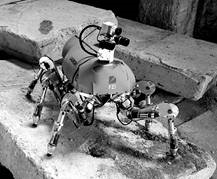
Рис. 2. Робот LAURON 5 (2013)
Движения 6 ног и головы управляются распределённой системой модулей UCoMs (Модуль универсального контроллера). Каждый из этих 9 UCoMS (8 для ног и один для головы) имеет свой собственный DSP и FPGA. Система CAN Bus соединяет все семь UCoMs друг с другом и с встроенной управляющей ЭВМ (система Mini-ITX ПК).
На основании полученной от датчиков информации LAURON 5 (рис. 2) строит карту своего окружения и может спланировать путь к заданной цели автономно. Во время пути LAURON 5 обнаруживает препятствия и принимает решение: либо взобраться на них, либо обойти вокруг, если препятствия слишком высоки. Шагающий робот предназначен для проверки и выполнения задач технического обслуживания в опасных для человека зонах: для обнаружения наземных мин, разведки вулканов, а также поисково-спасательных миссий после стихийных бедствий.
Робот IC Hexapod (рис. 3) был разработан британским инженером Мэттом Дентоном (Matt Denton). Гексапод обладает тремя степенями свободы, тремя актуаторами в каждой ноге и бортовым навигационным модулем p.Brain, который осуществляет перемещение ног и всего тела.

Рис. 3. Робот гексапод Hexapod iC
iC Hexapod работает на 16 битном процессоре PIC. Основной интерес представляет ПО для распознавания и трекинга человеческих лиц. Зафиксировав лицо человека, цифровая камера на голове шагающего робота начинает снимать. Видеопоток передаётся на удалённый компьютер, где он записывается и проходит дальнейшую обработку [4].
Для перемещения iC Hexapod’а оператор просто указывает роботу направление, при этом задаётся только вектор движения, а сигналы на сервоприводы направляет уже контроллер p.Brain. Именно контроллер рассчитывает, какую ногу поднять и куда её поставить.
В работе [5] приведён обзор сельскохозяйственного робота, который использует собственную навигационную систему для работы в поле. BoniRob создан компанией Аmazone для обработки отдельных растений (рис.4).

Рис. 4. Сельскохозяйственный робот BoniRob
Задачу навигации данный робот решает построением навигационной карты местности — после проведения обработки растения, BoniRob заносит GPS координаты местонахождения в память и таким образом строит карту проведенных работ.
Четырёхногий робот BigDog (рис. 5.) был создан в 2005 году фирмой Boston Dynamics совместно с Foster-Miller. Разработка финансировалось DARPA, а работы по добавлению манипулятора в систему финансируются программой RCTA военной научно-исследовательской лаборатории [6]. Данный робот применяется для переноски небольших грузов в недетерминированных условиях на местности со сложным рельефом. По размеру BigDog можно сравнить с большой собакой или маленьким мулом — в длину 0,91 м., в высоту 0,76 м., вес 240 кг.
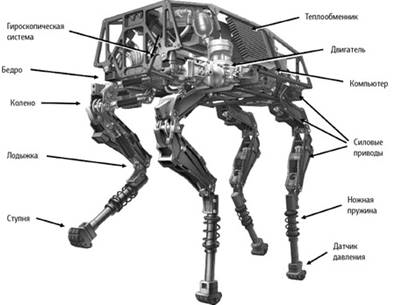
Рис. 5. Робот BigDog
Задачи навигации BigDog решает бортовой компьютер, который совмещает как низкого-уровневое управление, так и функции управления на высоком уровне. Система управления нижним уровнем контролирует позиции сервоприводов и угловые силы. Система управления верхнего уровня координирует поведение ног, регулирует скорость и высоту платформы во время передвижения. Система управления также регулирует силы взаимодействия конечностей с землёй для поддержания баланса робота, обеспечения стабильного движения и сцепления с поверхностью. Система управления следит за балансом робота и управляет передвижением по различным типам поверхности. При отключении средств беспроводной передачи данных BigDog продолжает движение по маршруту, рассчитанному на бортовом компьютере, анализируя информацию, получаемую от датчиков и системы бинокулярного зрения. Датчики обеспечения движения включают в себя датчики положения и усилия, нагрузки, контакта с поверхностью, лазерный гироскоп. Остальные датчики следят за внутренним состоянием BigDog, а именно осуществляют мониторинг гидравлического давления, температуры масла, функций двигателя, зарядки батареи [7].
Заключение
Проведя краткий обзор мобильных роботов с распределённой бортовой системой навигации, можно отметить, что на сегодняшний день особо остро стоит проблема перемещения в недетерминированных условиях и реагирования на изменения окружения в режиме реального времени. Роботизированные системы, использующие только удалённое управление, имеют ряд серьёзных проблем, обусловленных ограничениями канала связи и необходимостью постоянного участия человека-оператора в процессе управления. Необходимо серьёзно повысить уровень автономности бортовых систем управления мобильных роботов. Стоит помнить, что при передаче бортовому компьютеру ряда функций организации управления и слежения, мы сталкиваемся с проблемой обработки огромного потока информации.
Для решения выше обозначенных проблем предлагается применить комплексный подход, который сочетает в себе использование специальных технических средств, разработку специального программного обеспечения бортового компьютера, выполняющего в масштабе реального времени анализ видеоданных для автоматического формирования цели, а также применение распределённой модульной структуры системы управления, что позволит удешевить и расширить возможности модернизации такой системы путем замены существующих или добавления новых модулей, увеличивающих функциональность робота.
Литература:
1. Бишоп О. Настольная книга разработчика роботов «МК-Пресс», СПб.: КОРОНА-ВЕК, 2010. 400 с.
2. Chiacchio P., Chiaverini S. Complex Robotic Systems, 2006. 209 pages.
3. Arne Rönnau: Walking Robot LAURON [Электронный ресурс] — режим доступа: http://www.fzi.de/en/research/projekt-details/lauron/?contentId_=670
4. Celaya, Enric, Albarral, Jose Luis. «Implementation of a hierarchical walk controller for the LAURON III hexapod robot». Institut de Robòtica i Informàtica Industrial.
5. What iC? [Электронный ресурс] — режим доступа: http://www.hexapodrobot.com/ic/whatic.html
6. Петрасек С., Длоугый М. Мобильные роботы для ухода за растениями // Сельский механизатор, М.: ООО «Нива», 2013. № 6(52). С. 8–9.
7. BigDog — The Most Advanced Rough-Terrain Robot on Earth [Электронный ресурс] — режим доступа: http://www.bostondynamics.com/robot_bigdog.html
8. Raibert M., Blankespoor K., Nelson G., Playter R. and the BigDog Team. BigDog, the Rough-Terrain Quaduped Robot, Boston Dynamics, Waltham, MA 02451 USA
