




В статье описаны методы обработки информации, используемые в навигационных системах подвижных наземных объектов. Перечисляются методы обработки информации в навигационных системах подвижных наземных объектов и их недостатки. В качестве нового метода предлагается использовать методы позволяющие установить факт наличия или отсутствия сигналов на входе радиотехнических систем входящих в состав навигационной системы для подвижных наземных объектов — методы марковской теории оценивания случайных процессов.
Введение
Система навигации подвижных наземных объектов (ПНО) решает задачи определения координат местоположения, параметров движения и углов ориентации подвижного объекта и выдачу необходимой информации. В статьях [1–2] производится обзор существующих навигационных систем, как военного, так и гражданского применения. В них подробно рассматривается работа некоторых датчиков, методы обработки информации в данных системах и сравниваются значений погрешностей в определения курса. В статье [3] дается анализ систем навигации отечественного и иностранного производства с указанием оптимального режима работы систем и без сравнения представленных точностных характеристик между собой без указания методов обработки информации. В [4] описываются методы определения местоположения подвижных объектов.
Однако описание методов обработки информации навигационных систем для ПНО и их анализ в литературе не встречается. Целью статьи описание методов обработки информации навигационных систем для ПНО и их анализ.
Обычно под термином навигационная система принято понимать совокупность приборов, алгоритмов и программного обеспечения, позволяющих произвести ориентирование объекта в пространстве. Навигационные системы можно разделить на множество категорий в зависимости от назначения, объема получаемой навигационной информации и используемых методов навигации. Система навигации подвижных наземных объектов (ПНО) решает задачи определения координат местоположения, параметров движения и углов ориентации подвижного объекта и обеспечивает выдачу следующих данных: координаты местоположения в заданной системе координат, вектор скорости, углы ориентации (крен, курс, тангаж), вектор угловой скорости, вектор ускорения.
Точностные характеристики систем навигации для ПНО зависят от режима работы, состава данных систем и программного обеспечения применяемого для обработки информации и контроля целостности системы.
Наиболее перспективным для навигационных систем ПНО можно считать состав, представленный в статье [5], включающий бесплатформенную инерциальную навигационную систему, спутниковые радионавигационные системы (СРНС), системы сотовой связи и другие дополнительные датчики. Данный состав был предложен исходя из анализа состава существующих навигационных систем в настоящее время и представлен на рисунке 1.
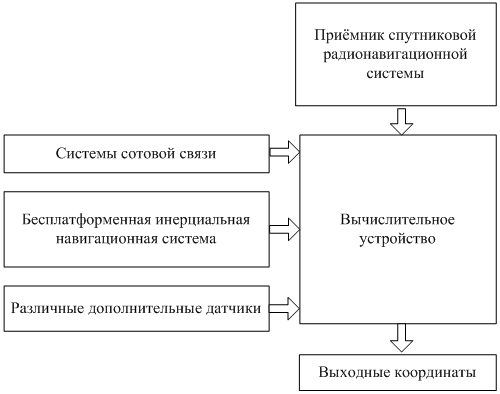
Рис. 1. Наиболее перспективный состав системы навигации для ПНО
Основным алгоритмом обработки информации в навигационных системах подвижных наземных объектов является оптимальный алгоритм оценивания, базирующийся на дифференциальных или разностных уравнениях, полученных на основе методов калмановской фильтрации. Это проиллюстрировано в статьях [6,7] и приведены примеры навигационных систем.
Так как в состав большинства современных систем навигации для ПНО входит СРНС [8], и пропадание данных от СРНС приводит к значительному росту погрешностей в определении местоположения. Полученные в данном случае значения не соответствуют требуемым значениям, приведенным в [9], поэтому появляется необходимость применения различных методов контроля состояния приемника СНРС, с помощью которых возможно будет определить факт наличия или отсутствия сигнала на входе приемника. Применяемые в качестве основных методов обработки информации методов калмановской фильтрации не дает возможности реализовать данный контроль, что является одним из их недостатков. Он заключается в том, что методы калмановской фильтрации эффективны лишь при наличии выходных сигналов с датчиков, то есть исправной работе датчиков, входящих в состав навигационной системы.
Для контроля технического состояния тех или иных датчиков нашли применение и различные методы, основанные на анализе невязки измерений и методы анализа изменения оцениваемых компонент вектора состояния во времени (выявление резких скачков значений оцениваемых параметров и выхода значений оцениваемых параметров за пределы допустимых коридоров). Данные методы не позволяют определить факт наличия или отсутствия сигнала на входе приемника СРНС, но позволяют контролировать полученные данные от приемника СРНС.
Таким образом, для повышения качества работы необходимы методы первичной обработки в навигационных системах подвижных наземных объектов. В качестве данных методов могут быть использованы методы марковской теории оценивания случайных процессов, которые позволяют определить факт наличия или отсутствия сигналов на входе радиотехнических систем, таких как СРНС, системы сотовой связи, радиотехнические системы дальней навигации.
Алгоритмы данного типа в дальнейшем могут стать основой систем не только с возможностью контроля и диагностики элементов системы, но и с возможностью последующей реконфигурации структуры.
Литература:
1. Комраков Д. В. Навигационные комплексы наземных мобильных средств / Д. В. Комраков // Технические науки: теория и практика: материалы междунар. заоч. науч. конф. (г. Чита, апрель 2012 г.). — Чита: Издательство Молодой ученый, 2012. — С. 47–49.
2. А. В. Журавлев, В. М. Безмага. Навигационные комплексы наземных мобильных средств// Новости навигации — 2009 — № 1 — С. 29–36.
3. Петров Н. Н. Системы и комплексы технических средств местоопределения подвижных объектов //Специальная техника. — 1998. — №. 3. — С. 7–11.
4. Сурков В. О. Системы навигации подвижных наземных объектов и их характеристики/ В. О. Сурков // Молодой ученый. — 2013. — № 7. — С. 76–79.
5. Сурков В. О. Анализ состава существующих систем навигации дляподвижных наземных объектов и выбор наиболее перспективного состава, исходя из требований точности и надежности / В. О. Сурков // Современные тенденции технических наук: материалы II междунар. науч. конф. (г. Уфа, май 2013 г.). —Уфа: Лето, 2013. —С. 20–24.
6. Сурков В. О. Системы навигации подвижных наземных объектов и их характеристики / В. О. Сурков // Молодой ученый. — 2015. — № 9. — С. 298–302.
7. Сурков В. О. Навигационные системы подвижных наземных объектов и их характеристики/ В. О. Сурков// Магистратура ТГТУ. — 2012. — № 27. — С. 105–109.
8. Сурков В. О. Анализ состава навигационных систем для подвижных наземных объектов и принципов их построения / В. О. Сурков // Технические науки: традиции и инновации: материалы II междунар. науч. конф. (г. Челябинск, октябрь 2013 г.). — Челябинск: Два комсомольца, 2013. — С. 34–37.
9. Радионавигационный план Рос. Федерации: утв. приказом Министерства промышленности и торговли РФ от 2 сентября 2008 г. № 118: в редакции приказа Министерства промышленности и торговли РФ от 31 августа 2011 г. № 1177. [Электронный ресурс]. Доступ из справ.-правовой системы «КонсультантПлюс».
