




В статье дан сравнительный анализ принципов построения систем навигации подвижных наземных объектов. Принципы построения систем иностранного производства имеют некоторые отличия, такие как использование дифференциального режима работы спутниковой радионавигационной системы. Системы построенные на основе данных принципов не позволяют обеспечить необходимую точность данных при пропадании сигналов спутниковой радионавигационной системы. Поэтому предложены новые принципы построения навигационных систем исходя из особенностей построения данных систем.
Система навигации подвижных наземных объектов(ПНО) решает задачи определения координат местоположения, параметров движения и углов ориентации подвижного объекта и обеспечивает выдачу следующих данных: горизонтальных координат (координат), высоты, путевой скорости, углов ориентации (крена, курса, тангажа).
Обобщенная структурная схема навигационной системы ПНО отечественного производства представлена на рисунке 1.
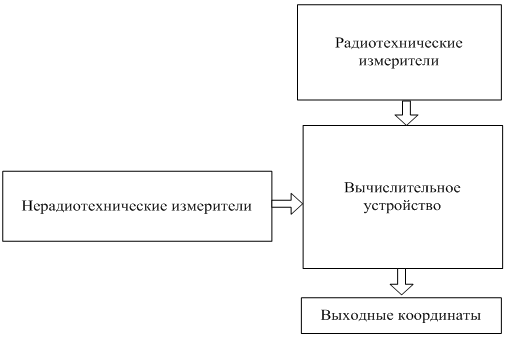
Рис. 1. Структурная схема системы навигации для ПНО отечественного производства
Системы навигации ПНО отечественного производства строятся с использованием следующих принципов:
1. Принципов комплексирования измерителей. Сущность комплексирования состоит в использовании информации об одних и тех же или функционально связанных параметрах, полученных от различных измерителей, для повышения точности и надежности определения навигационных параметров. Все рассмотренные в статье [1] системы навигации являются комплексными.
2. В состав навигационной системы входят как радиотехнические так и нерадиотехнические измерители. Нерадиотехнические измерители — измерители системы, работающие без сигналов от внешних источников. Основное их назначение — определение координат, параметров движения и пространственного положения продольных осей объекта. Среди главных достоинств данных измерителей следует отметить автономность действия и высокую помехозащищенность. Недостатком является малая для большинства измерителей точность измерения навигационных параметровпо сравнению с радиотехническими измерителями.
В качестве измерителей могут быть использованы следующие устройства:
- измеритель угловой скорости — датчик угловой скорости (система «КомпаНав-3»), волоконно-оптический (система «БИНС-Тек»);
- измеритель ускорения — датчик линейных ускорений (система «КомпаНав-2Т);
- измеритель магнитного поля Земли: 3-осный магнитометр (система «КомпаНав-2М»);
- измеритель скорости, выполненный в виде механического («Гамма — 1») или доплеровского датчика скорости («ГАЛС — Д2М»)
- измеритель высоты — барометрический высотомер (система «КомпаНав-3»);
- измеритель пройденного пути, который может выполняться в виде одометра (система «БИНС-Тек», «Азимут»).
Одно из назначений радиотехнических измерителей — коррекция данных полученных от нерадиотехнических измерителей для повышения точности показаний навигационной систем.
В качестве радиотехнической системы коррекции обычно используется приемник спутниковой навигационной системы (СРНС) (ГЛОНАСС/GPS) и радиотехнические системы дальней навигации «Чайка» и «LORAN-C», входящие в состав системы «ОРИЕНТИР» и КС-100М.
3. Для разработки алгоритмов обработки информации в навигационных системах используются методы оптимальной линейной фильтрации (фильтр Калмана — Бьюси) [2].
Системы навигации ПНО иностранного производства имеют следующую структурную схему, представленную на рисунке 2.
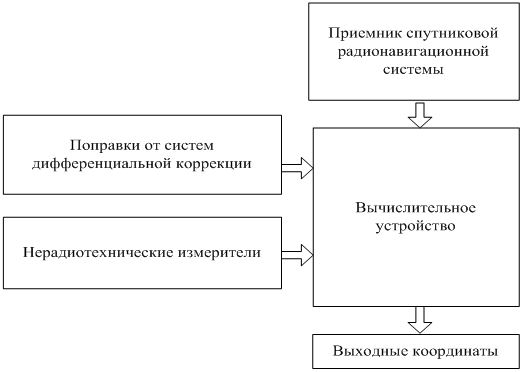
Рис. 2. Структурная схема системы навигации для ПНО иностранного производства
Строятся данные системы на аналогичных принципах построения, что и навигационные системы отечественного производства, но с небольшими отличиями:
1. В качестве основного радиотехнического измерителя используется приемник СРНС.
2. Для повышения точности данных, полученных от приемника СРНС, используется дифференциальный режим работы СРНС. Дифференциальный режим включает в себя получение данных от СРНС, получение дифференциальных поправок от систем дифференциальной коррекции, их обработку и выдачу данных потребителю. Одно из назначений дифференциального режима работы состоит в повышении точности данных полученных от приемника СРНС.
Для обеспечения дифференциального режима работы СРНС в навигационных системах иностранного производства используется соответствующее программное обеспечение, например TheSplitBoxдля системы Ekinox-N. В данном программном обеспечении осуществляется обработка данных как от датчиков входящих в состав системы, так и от систем дифференциальной коррекции и их обработку.
Так как в состав большинства современных систем навигациидля ПНО входит СРНС [3], и пропадание данных от СРНС приводит к значительному росту погрешностей в определении местоположения. Полученные в данном случае значения не соответствуют требуемым значениям, приведенным в [4]. Системы построенные по приведенным выше принципам не позволяют обеспечить данные требования при пропадании сигналов от СРНС, поэтому появляется необходимость применения различных методов контроля состояния приемника СНРС, с помощью которых возможно будет определить факт наличия или отсутствия сигнала на входе приемника и методов реконфигурации структуры системы.Применяемые в качестве основных методов обработки информации методы калмановской фильтрации не дают возможности реализовать данный контроль, что является одним из их недостатков. Он заключается в том, что методы калмановской фильтрации эффективны лишь при наличии выходных сигналов с датчиков, то есть исправной работе датчиков, входящих в состав навигационной системы.
Для контроля технического состояния тех или иных датчиков нашли применение и различные методы, основанные на анализе невязки измерений и методы анализа изменения, оцениваемых компонент вектора состояния во времени (выявление резких скачков значений оцениваемых параметров и выхода значений оцениваемых параметров за пределы допустимых коридоров) [5–7].Данные методы не позволяют определить факт наличия или отсутствия сигнала на входе приемника СРНС, но позволяют контролировать полученные данные от приемника СРНС.
Таким образом, для повышения качества работынеобходимы методы первичной обработки внавигационных системах подвижных наземных объектов.
Сформулируем принципы построения навигационных систем ПНО с учетом приведенного выше
1. В состав навигационной системы должны входить как радиотехнические так и нерадиотехнические измерители;
2. Строится система должна с использованием принципов комплексирования измерителей;
3. Для повышения точности данных, полученных от приемника СРНС, необходимо использование дифференциального режима работы СРНС;
4. Для контроля, диагностики и обработки данныхрадиотехнических измерителей необходимо применение алгоритмов построенных с использованием методов марковской теории оценивания случайных процессов, которые позволяют определить факт наличия или отсутствия сигналов на входе радиотехнических систем, таких как СРНС, системы сотовой связи, радиотехнические системы дальней навигации.
5. Для устранения последствий от пропадания сигналов СРНС необходимо применение алгоритмов позволяющих производить реконфигурацию системы.
Литература:
1. Сурков В. О. Анализ состава существующих систем навигации для подвижных наземных объектов и выбор наиболее перспективного состава, исходя из требований точности и надежности / В. О. Сурков // Современные тенденции технических наук: материалы II междунар. науч. конф. (г. Уфа, май 2013 г.). — Уфа: Лето, 2013. — С. 20–24.
2. Иванов, А. В. Навигация наземных объектов / А. В. Иванов, Н. А. Иванова. — LAPLAMBERTAcademicPublishing, 2013. — 120 с.
3. Сурков В. О. Системы навигации подвижных наземных объектов и их характеристики / В. О. Сурков // Молодой ученый. — 2013. — № 7. — С. 76–79.
4. Радионавигационный план Рос. Федерации: утв. приказом Министерства промышленности и торговли РФ от 2 сентября 2008 г. № 118: в редакции приказа Министерства промышленности и торговли РФ от 31 августа 2011 г. № 1177. [Электронный ресурс]. Доступ из справ.-правовой системы «КонсультантПлюс».
5. Иванов, А. В. Комплексные оптимальные алгоритмы обработки информации в навигационных системах подвижных наземных объектов / А. В. Иванов // Радиотехника. — 2010. — № 5. — с. 12–17.
6. Иванов, А. В. Автономные системы контроля целостности навигационных данных спутниковых радионавигационных систем/ А. В. Иванов// Радиотехника. — 2014. — № 7. — С. 56–64.
7. Иванов, А. В. Алгоритмы обработки информации в навигационных системах наземных подвижных объектов с контролем целостности навигационных данных спутниковых радионавигационных систем / А. В. Иванов, Д. В. Комраков, В. О. Сурков // Вопросы современной науки и практики. Университет им. В. И. Вернадского. — 2014. — № 52. — с. 53–58.
