





Эффективность работы навигационных систем для подвижных наземных объектов (ПНО) как известно зависит от набора датчиков, входящих в её состав и метода обработки информации, используемого для получения необходимых данных.
В процессе своей работы система навигации должна решать следующие задачи:
- преобразование координат;
- определение координат местоположения и параметров движения объекта;
- комплексная обработка информации;
- коррекция координат местоположения;
- выдача навигационной информации на индикатор и соответствующим потребителям;
В зависимости от области применения системы навигации появляются требования, которые должны быть выполнены при создании системы. Эти требования могут быть как к системе в целом, так и к её составу и алгоритму обработки данных
Облик навигационной системы для подвижного наземного объекта и предполагаемый состав системы с описанием его элементов были предложены в [1] без описания варианта алгоритма обработки информации. Состав данной системы представлен на рисунке 1.
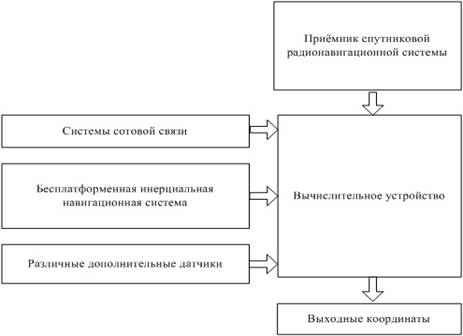
Рис. 1. Наиболее перспективный состав системы навигации для ПНО
В предлагаемой схеме в качестве основных элементов выступают бесплатформенная инерциальная навигационная система (БИНС) и спутниковая радионавигационная система (СРНС). БИНС выполняет роль основной нерадиотехнической системы. Одним из её недостатков является увеличение погрешностей при определении необходимых параметров с течением времени.
СРНС используется как для самостоятельной работы в навигационной системы, так и для коррекции данных от БИНС.
Применение систем сотовой связи в комбинации с СРНС не дает значительного уменьшения погрешностей позиционирования в виду того, что значения погрешностей, полученных при применении данных технологий в 10–100 раз больше, чем значения, полученные при применении спутниковых радионавигационных систем. Это проиллюстрировано в статье [2] и приведены соответствующие значения погрешностей при проведении моделирования. Применение систем сотовой связи в навигационных системах целесообразно лишь при пропадании сигналов от СРНС в качестве резервной системы при использовании реконфигурируемых алгоритмов обработки информации в ЭВМ навигационной системы.
В качестве дополнительных возможно применение таких датчиков, как барометрический высотомер который позволяет обеспечить целостность информации СРНС [3], доплеровский измеритель скорости, датчик скорости и т. д.
В состав подсистем комплекса необходимо включать [5]:
- специализированные вычислители и микропроцессоры, осуществляющие предварительную обработку информации для подготовки её к использованию в вычислительной системе;
- дополнительные согласующие устройства, выполняющие преобразование координат и согласование динамических диапазонов сигналов;
В современных условиях одно из требований к навигационным системам заключается в том, что система должна иметь возможность приспосабливаться к изменяющимся условиям окружающей среды и обеспечивать потребителя необходимой навигационной информацией. Изменение условий функционирования навигационной системы может произойти:
- из-за выхода из строя (отказа) того или иного элемента, что характерно как для радиотехнических так и для нерадиотехнических измерителей;
- из-за кратковременного пропадания сигнала на выходе того или иного элемента — переход в состояние временного отказа, что характерно только для радиотехнических измерителей и связано с изменением внешних условий, приводящих к уменьшению мощности сигнала на входе приемного устройства измерителя или к его полному кратковременному пропаданию. Характерен кратковременный отказ для среднеорбитальных спутниковых радионавигационных систем ГЛОНАСС (глобальная спутниковая навигационная система) и NAVSTAR (Navstar — Navigational Satellite Time and Ranging — навигационный спутник измерения времени и координат) или по ее фактическому назначению GPS используемых на сегодняшний день практически во всех навигационных системах.
- наличием различного рода помех, которые могут быть как искусственными, так и естественными.
Для реализации данного направления используют:
- введение в комплекс резервных элементов. В случае отказа того или иного элемента требуется выполнение такой реконфигурации комплекса, т. е. изменения структуры функционирующих элементов и связей между ними, которая обеспечила бы минимальное снижение эффективности комплекса;
- применение программной реконфигурации комплекса. В случае выхода из строя части элементов комплекс продолжает функционировать (с меньшей эффективностью) без использования дублирующих элементов. Это достигается путем некоторого (избыточного для нормального режима) расширения возможностей элементов, достигаемого в основном за счет расширения функций программного обеспечения. Наиболее целесообразным при этом является применение информационной избыточности (наличие множества алгоритмов и реализующих их программ для решения одной и той же задачи).
Введение в систему резервных элементов приводит к увеличению массы и габаритных размеров системы, усложнению технического обслуживания и может выполняться при наличии соответствующего обоснования.
Программная реконфигурация системы лишена недостатков первого направления и является более перспективным решением. Для обеспечения программной реконфигурации навигационной системы необходимо организовать не только диагностирование технического состояния элементов комплекса, то есть решать следующие задачи:
1. Определение отказавшего элемента и времени его отказа;
2. Снятие с решения функции, выполняемой на элементе;
3. Передача данной функции другому элементу;
4. Исключение отказавшего элемента из состава объекта;
5. Попытка замены отказавшего элемента на резервный;
6. Исключение связей с отказавшим элементом, запрет доступа к нему.
Но и необходимо обеспечить контроль поля радиосигналов на входах радиотехнических измерителей, то есть в требование 1 необходимо так же включить обеспечение контроля поля радиосигналов на входах приемных устройств радиотехнических измерителей для выявления факта их пропадания с целью определения перехода измерителя в режим кратковременного отказа [9, 10].
Реализовываться программная реконфигурация системы должна в коммутационных устройствах, обеспечивающих перевод её информационной части в другие режимы (в том числе и некомплексные) функционирования при изменении состояния радиоэлектронного поля сигналов, что обеспечит требуемую живучесть комплекса и реконфигурацию структуры информационной системы комплекса под конкретную ситуацию.
В дальнейшем необходимо проанализировать существующие методы контроля технического состояния навигационных систем и методы реконфигурации их информационной части с целью определения соответствия их данным требованиям с указанием недостатков и выбором наиболее подходящего метода.
Литература:
1. Сурков В. О. Облик перспективной навигационной системы для подвижного наземного объекта / В. О. Сурков // Молодой ученый. — 2014. — № 12. — С. 107–110.
2. Иванов А. В. Совместная обработка информации спутниковых радионавигационных систем и наземных сетевых систем в навигационных системах подвижных наземных объектов / Иванов А. В., Гостев А. В., Семенов А. А., Соколовская Л. В. / Радиотехника. — Москва, № 4, с.16–19.
3. Иванов, А. В. Комплексные оптимальные алгоритмы обработки информации в навигационных системах подвижных наземных объектов с контролем целостности навигационного обеспечения / А. В. Иванов // Радиотехника. — 2010, № 12.
4. Иванов, А. В. Синтез алгоритмов обработки информации в радиоэлектронных комплексах/ А. В. Иванов, С. Н. Данилов, А. П. Пудовкин//Учебное пособие для вузов. — Тамбов: Издательство ФГБОУ ВПО «ТГТУ», 2012. — 80 с
5. Иванов, А. В. Автономные системы контроля целостности навигационных данных спутниковых радионавигационных систем / А. В. Иванов // Радиотехника. — 2014.– № 7. — С. 55–64.
6. Иванов, А. В. Алгоритмы обработки информации в навигационных системах наземных подвижных объектов с контролем целостности навигационных данных спутниковых радионавигационных систем/ А. В. Иванов, Д. В. Комраков, В. О. Сурков// Вопросы современной науки и практики «Университет имени В. И. Вернадского». Спецвыпуск — 2014. — № 52. — С. 53–58.
