





С момента своего появления роботы – относительно автономные исполнительные системы, прошли путь от примитивных механизмов до сложных, эффективных устройств, во многом превзойдя по своим возможностям человека. Очевидно, что в ближайшие десятилетия всё более совершенные роботы станут незаменимыми помощниками людей и смогут взять на себя обеспечение большей части потребностей цивилизации.
Система управления робота, состоит из объекта управления, которым здесь являются исполнительные устройства робота (приводы движения, поворота, механизмы позиционирования сенсорных устройств), и устройства управления. Исполнительные устройства в свою очередь состоят из механической системы и приводов. При необходимости, робот может быть оснащен механической системой манипулятора, заканчивается рабочим органом в виде рабочего инструмента или захватного устройства, с помощью которого осуществляется целенаправленное воздействие робота на объекты внешней среды. Сама платформа робота также могут иметь рабочие органы — бульдозерный нож, пылесос, лебедку, подвижную грузовую платформу и т.п. Особенность приводов и систем управления для систем передвижения роботов в том, что их основной режим — это управление по скорости с переходом на позиционное управление при остановках. В независимости от конфигурации оборудования можно выделить три уровня управления исходя из физической реализации и времени рабочего такта (рис. 1).
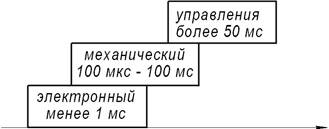
Рисунок 1 – Уровни управления роботом
Механическая часть системы передвижения определяется ее типом, в зависимости от области применения аппарата: наземная (напольная), для движения в трубопроводах, по вертикальным поверхностям, в воде (под водой) или в других средах (воздушные, космические и т.п.).
Вследствие сложности робототехнических систем как объектов исследования основным средством такого исследования, помимо, разумеется, физического моделирования и натурных экспериментальных исследований, является математическое моделирование на ЭВМ для решения задач, как анализа, так и синтеза. Предварительно при таком компьютерном исследовании решаются две задачи: доказательство достоверности используемого математического описания робота, т. е. решение задачи идентификации; разработка компьютерной модели и доказательство ее адекватности исходному математическому описанию [1].
Задача разработки компьютерной модели заключается в формировании математических алгоритмов позволяющих на основе систем дифференциальных и интегральных уравнений описывающих поведение и состояние исследуемого объекта на различных этапах его жизненного цикла.
Самым оптимальным, по мнению авторов, является использование модульной структуры, в связи с ее универсальностью и возможностью формирования модели любой сложности из элементарных кирпичиков (элементов типа «привод», «звено манипулятор», «УЗД», «внешняя среда»). Хорошим подспорьем является наличие МЕТА САПР (framework системой) позволяющей произвести расчет декомпозированной системы, сосредоточившись только на алгоритмах и не углубляясь в интерфейс и программный код. Разрабатываемая система позволяет в силу своей архитектуры решать как задачи анализа, так и задачи синтеза. Отличительной особенностью разрабатываемой системы является реализация совместного моделирования элементов систем управления и шасси со всеми механическими частями, в том числе с учетом перемещения по местности со сложным рельефом.
Серьезной задачей при разработке математических моделей и программного обеспечения для их реализации является их доводка, идентификация и проведение физических экспериментов позволяющих подтвердить их адекватность.
С это целью была разработана и построена многоцелевая мобильная платформа с двухуровневой системой управления.
Для первого этапа была поставлена задача разработки робота на колесном шасси, массой до 3 кг, система управления которого позволяет проехать по П-образной траектории обозначенной линиями и сигнальными конусами. Кроме этого, наличие в бортовом комплексе управления наземного комплекта аппаратуры спутниковой навигации должно позволить посетить назначенные точки на рабочей площадке размером 100 м на 100 м в определенном порядке.
Были проанализированы имеющиеся системы управления роботами и их классификация:
- По типу алгоритма управления различают системы:
программного, адаптивного, интеллектуального управления.
- По степени участия человека в процессе управления существуют системы:
автоматического, автоматизированного, ручного управления.
- По типу движения существуют системы управления:
непрерывные (контурные), дискретные позиционные шагами “от точки к точке”,
дискретные цикловые по упорам с одним шагом по каждой координате.
- По виду управляемых переменных различают системы управления:
положением (позицией), скоростью, силой (моментом).
За редким исключение узкоспециализированных роботов, способы управления применяются в комбинации с одновременным применением по разным координатам или в виде некоторой функциональной зависимости управляемой переменной от другой, либо с последовательным переходом от одного способа управления к другому. Применительно к управлению манипулятором последние способы управления означают управление абсолютными координатами его рабочего органа, скоростью и силой (моментом).
При исследовании и синтезе систем управления манипуляторов были применены известные методы теории автоматического управления. Вследствие сложности предложенного объекта управления при этом прибегают к следующим методам упрощения задачи: декомпозиция, итеративный метод, синтез через анализ, компьютерное моделирование.
В результате была сформирована общая концепция системы управления многоцелевой платформой. Для упрощения в ней показан только контур управления только самой платформой, точнее ее передвижением (рис 2). Из схемы видно, что объектную обстановку вокруг робота формируют специальные датчики (видеокамера (ВК), ультразвуковые дальномеры (УЗД), датчики линии (ДЛ), лазерный локатор секторного или кругового обзора (лидар), контактные датчики (КД)). На основании полученной с них информации по специальным алгоритмам система автоматического управления платформы формирует математическую модель местности. По сути, она сформирована из двух массивов: углов и дальностей. Кроме этого дискретные датчики КД и ДЛ выдают предупреждения при определенных событиях: контакт с ограждением и пересечение линии разметки. КД, реализованный в виде сенсорной системы, ко всему прочему может зафиксировать недопустимое сокращение дистанции без контакта. На основании этих данных формируются сведенья о препятствиях и недопустимых для движения направлениях.
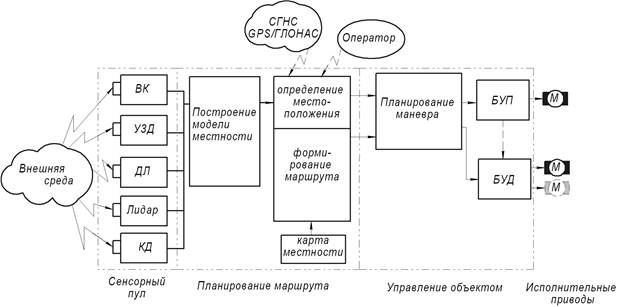
Рисунок 2 – Структура системы управления роботом
Сопоставляя электронную карту местности, возможных направлениях движения, координаты платформы по данным глобальной системы спутниковой навигации (а при необходимости и собственной инерциальной навигационной системы) со следующей точкой маршрута бортовой комплекс управления определяет маршрут (направление движения). Сравнивая эти данные с имеющимся направлением платформы модуль управления объектом производит планирование маневра и выдает команды на блок управление движением (БУД) и блок управления поворотом (БУП), который либо поворачивает колеса, либо формирует разницу в работе гусениц правого и левого бортов (штриховая линия на схеме).
Для реализации на первом этапе данная схема была упрощена, в части внешней коммуникации. Датчики представлены web-камерой loghitec и датчиками линии. Внешняя коммуникация с оператором осуществлялась через локальную сеть, реализованную через Wi-Fi (Wi-Max) модуль нетбука верхнего уровня.
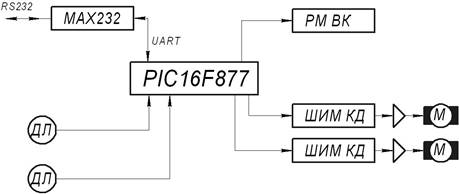
Рисунок 4 – Нижний уровень управления мобильной платформы
Для удобство реализации система управления была разделена на два уровня верхний и нижний, причем нижний может работать автономно. Схема нижнего уровня приведена на рисунке 3. Он предназначен для управления силовыми приводами поворота и движения по данным датчиков линии и командам верхнего уровня управления. Для силовых приводов движения и поворота используются внешние широтно-импульсные (ШИМ) контролеры движения. Кроме этого на нижний уровень возложены функции позиционирования видеокамеры верхнего уровня с помощью аналоговой рулевой машинки (РМ ВК), либо циклично по заданной программе, с выдачей угла на верхний уровень, либо строго на угол, заданны верхним уровнем управления. В случае отсутствия верхнего уровня или пропадания его сигнал нижний уровень полностью автономен и будет вести платформу вдоль тонких линий, остановка платформы происходит по команде от кнопки «Стоп» (на схеме не показана) или пресечения заданного количества толстых линий. При работе вместе ведущим является верхний уровень.
Для реализации интеллектуальной составляющей алгоритма управления с использованием образов окружающих объектов, был реализован верхний уровень управления (рис. 5)
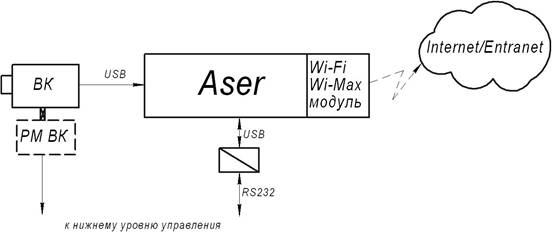
Рисунок 5 – Верхний уровень управления мобильной платформы
Верхний уровень обеспечивает поиск заложенных в программу управления образов элементов окружающей обстановки (сигнальных конусов, стенок, ограждений и т.п.), формирования их углов места, а при стереокамере определять дальность до них. По этим данным, с учетом алгоритма движения, в соответствии с конкретной задачей, данный уровень управления вырабатывает сигналы, указывающие исполнительному нижнему уровню о необходимом угле доворота и скорости движения вперед или назад. Для обеспечения необходимого сектора обзора видеокамеры верхний уровень выдает команды на ее позиционирования или формирует необходимую циклограмму ее движения.
Уровни обмениваются информацией по разработанному авторами 8-битному коммутационному протоколу. Автономность нижнего уровня обеспечивает нормальный режим движения платформы, даже при пропуске части команд.
Расширение функциональности, разработанного комплекса обеспечивается открытой архитектурой системы в основном за счет периферийных устройств нетбука и легкости его перепрограммирования, что обеспечивает возможность подключения GPS навигаторов, GSM модема, лидара, включая корректировку ПО в течении нескольких часов.
В результате коллективом авторов была создана легкая многоцелевая автономная мобильная платформа с интеллектуальной системой управления, позволяющая решать широкий круг задач, прежде всего: отработка алгоритмов управления и аппаратного обеспечения многоцелевых наземных роботов, верификация математических моделей системы управления и механических частей платформы.
Авторы благодарят ООО «Фестон» за поддержку при разработке аппаратной части платформы.
Работа выполнена при финансовой поддержки министерства образования и науки РФ.
Список литературы
1 С.Ф. Бурдаков. Математические модели и идентификация роботов с упругими элементами. СПбГТУ, СПб,1990.
