




На сегодняшний день технологии помогают существенно упростить трудоемкие процессы на производстве. С этой же целью был спроектирован робот-помощник, позволяющий найти необходимую информацию по обслуживаемому автомобилю и сократить некоторое количество второстепенных операций механика при проведении технического обслуживания или ремонта автотранспортного средства.
Ключевые слова: робот-помощник, техническое обслуживание и ремонт, манипулятор.
Количество автомобилей с каждым годом растет, пропорционально этому растет рынок услуг по ремонту и обслуживанию. Ремонт современного автомобиля достаточно сложный и трудоемкий процесс. Несмотря на то, что существует множество приспособлений, упрощающих работу механика, она по-прежнему отнимает много сил и времени. Для сокращения времени работы и трудоемкости был спроектирован робот-помощник, который позволил бы переложить выполнение на него некоторых операций, тем самым упрощая процесс ремонта и обслуживания автомобиля.
Робот-помощник представляет собой колесную платформу со следующим оснащением: манипулятор, емкости для инструмента, микрофон, видеокамера, синтезатор речи, монитор, а также емкость для некоторых запасных частей. Управление роботом осуществляется голосовыми командами, в течение нескольких секунд команда обрабатывается, а затем робот-помощник начинает выполнять поставленные задачи.
Функциональные возможности робота на основе восприятия голосовой команды:
- Подача необходимого инструмента
- Получение запасных частей со склада
- Поиск и выведение на экран монитора, необходимой для механика, информации по ремонту или обслуживанию автомобилей
Действия манипулятора должны быть точно рассчитаны, иначе точность позиционирования будет существенно снижена, и возможность выполнения манипулятором своих задач уменьшится. Количество сегментов манипулятора и степень свободы самого манипулятора, как и схвата, ограничено его подвижностью. Манипулятор будет иметь три сегмента, а схват сможет вращаться вдоль продольной оси и поворачиваться в вертикальной плоскости. Также выходное звено будет иметь дополнительное движение для зажима детали. Кроме того, манипулятор должен поворачиваться вокруг своей оси. В качестве движущей силы манипулятора мы решили использовать серводвигатели по следующим причинам: точность двигателей весьма высока; робот точно «знает», в какое положение необходимо определить каждое звено манипулятора; аккумулятор сможет обеспечить достаточное количество циклов работы серводвигателей; усилия, создаваемого серводвигателями, будет достаточно для решения повседневных задач робота.
Определение абсолютного положения схвата манипулятора в пространстве решается математическим методом.
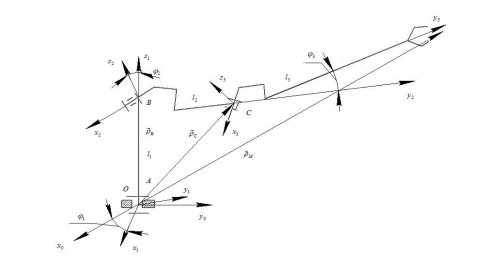
Рис. 1. Схема манипулятора
Первый поворот в шарнире A на угол ![]() вокруг единичного вектора
вокруг единичного вектора ![]() . При этом векторы изменят свое положение и перейдут в векторы
. При этом векторы изменят свое положение и перейдут в векторы ![]() . Эти векторы могут быть найдены по формуле Родриго:
. Эти векторы могут быть найдены по формуле Родриго: ![]() , где
, где ![]() ˗ единичные векторы (орты) декартовой системы координат; s = 2; 3(число осей единичного вектора).
˗ единичные векторы (орты) декартовой системы координат; s = 2; 3(число осей единичного вектора).
Произведение трех векторов последнего слагаемого выше приведенного уравнения равно 0, так как векторы коллинеарны между собой и ортогональны вектору ![]() ; следовательно, получим:
; следовательно, получим:
![]() (1)
(1)
Второй поворот в шарнире B на угол ![]() вокруг вектора
вокруг вектора ![]() :
:![]() , (2)
, (2)
где ![]() ˗ единичный вектор декартовой системы координат; s = 2; 3. Подставляем в формулу (2) выражение (1), получим:
˗ единичный вектор декартовой системы координат; s = 2; 3. Подставляем в формулу (2) выражение (1), получим:

Третий поворот осуществим в шарнире C на угол ![]() вокруг вектора
вокруг вектора ![]() .
.
Следует иметь в виду, что два поворота на углы ![]() и
и ![]() вокруг параллельных осей эквиваленты одному повороту на угол
вокруг параллельных осей эквиваленты одному повороту на угол ![]() , поэтому:
, поэтому:
![]() (4)
(4)
После определения векторов, задающих положения векторов и звеньев, легко находятся радиус-векторы точек механизма:
![]() (5)
(5)
Найденные векторы полностью определяют абсолютное положение схвата манипулятора в пространстве.
В заключение можно отметить, робот-помощник существенно сократит время ремонта или технического обслуживания за счет того, что возьмет на себя часть несложных работ. Используя этого робота, механик сможет, не отвлекаясь на вспомогательные операции, качественно выполнить ремонт и техническое обслуживание автомобиля.
Литература:
- Поезжаева Е. В. Промышленные роботы: учеб.пособие: в 3ч. / Е. В. Поезжаева. — Пермь: Изд-во Перм. гос. тех. ун-та,2009. — Ч.2. — 185 с.
- Проблемы механики современных машин: Материалы V международной конференции. — Улан-Удэ: Изд-во ВСГУТУ, 2012. — Т. 3. — 276с., ил. — Поезжаева Е. В., «Шагающий робот с контурной системой управления», с.227.
- Поезжаева Е. В., Васенин А. С., Шумков А. Г. Роботизация фермерских хозяйств по обработке растений // Вестник Восточно-Сибирского государственного университета технологий и управления. 2014. № 3. С. 59–62.
