




В современном мире автомобиль считается скорее средством передвижения, чем предметом роскоши, которым он считался в начале прошлого столетия. Несмотря на этот факт, каждый автовладелец уделяет пристальное внимание внешнему виду своего автомобиля. Помимо обычной мойки достаточно популярна услуга по полировке кузова автомобиля. В нижеприведенной статье рассмотрена роботизированная система, которая позволит качественно произвести обслуживание лакокрасочного покрытия.
Ключевые слова: автоматизированная система, лакокрасочное покрытие, обслуживание кузова автомобиля.
Без исключения каждый автовладелец хочет, чтобы его автомобиль был технически исправным и выделялся из потока аккуратностью своего экстерьера. Но для того, чтобы кузов автомобиля выглядел хорошо, порой недостаточно его мойки, необходимо систематически обслуживать лакокрасочное покрытие (ЛКП), следить за его состоянием. Этот процесс достаточно трудоемкий и на тщательную диагностику кузова может уйти немало времени и средств.
С целью уменьшения временных затрат на выявление неисправностей, повышения качества оценки ЛКП, автоматизации процесса обработки лакокрасочного покрытия была создана роботизированная система [1]. Она позволяет выявлять следующие недостатки:
Царапины и вмятины
Сколы и вздутия ЛКП
Микротрещины и микро царапины
Неоднородность финишного слоя краски
Потеки, очаги коррозии
В данной роботизированной системе применены неразрушающие методы контроля: для определения толщины лакокрасочного покрытия использован датчик, применяемый в ультразвуковом толщиномере [1]. Наибольший же интерес вызывает организация управления данной робототехнической системой. Рассмотрим ее подробнее.
Прежде всего, работа двух манипуляторов должна координироваться сенсорной системой, в которую входят система технического зрения, система программирования, иерархическая вычислительная система [2]. Оператор взаимодействует с системой путем подачи команд через модуль управления. Вместе с тем в зоне работы робототехнической системы необходимо осуществлять навигацию манипуляторов, координировать работу всей системы, следить за появлением, распознаванием и разрешением возникающих конфликтов, распознавать препятствия в зоне работы и изменять курс движения манипуляторов при работе [2]. Концепция системы проблемно-ориентированного программирования может выглядеть следующим образом (рис. 1).
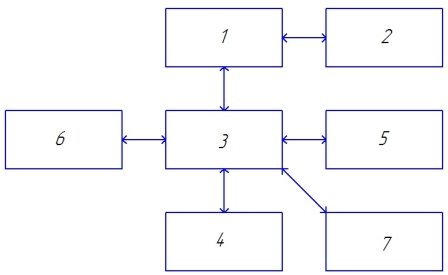
Рис. 1. Схема системы: 1 — модуль САПР; 2 — модель мира; 3 — модуль планирования; 4 — программный интерфейс; 5 — монитор; 6 — модуль языка программирования; 7 — манипулятор
Модуль САПР — в нем содержится графическая информация о форме обслуживаемых автомобилей. Эта информация используется модулем планирования при идентификации автомобиля.
Модель мира — структурное описание совершаемых манипуляторами операций, которая может содержать информацию о соотношениях между манипуляторами и объектов (автомобилем), использовании сенсоров для различных операций, стандартных процедурах обслуживания автомобилей.
Модуль планирования — модуль служит для описания среды работы манипуляторов и описания стоящей перед робототехнической системой задачи.
Программный интерфейс — служит для постановки стоящей перед роботом задачи и ее оперативного ввода пользователем.
Монитор — часть системы, контролирующая работу схватов в процессе работы и сопоставляющая их траектории с реальностью посредством системы технического зрения
Модуль языка программирования — модуль отвечает за задание программы робототехнической системе.
Манипулятор — устройство, которое обслуживает и диагностирует лакокрасочное покрытие (рис. 2). Он оборудован датчиками близости, датчиком неразрушающего контроля лакокрасочного покрытия; камерой, которая предоставляет информацию системе технического зрения [3].

Рис. 2. Манипуляторы для обслуживания кузова
В данной статье рассмотрен подход организации функционирования робототехнической системы для обслуживания лакокрасочного покрытия автомобиля, а также приведена схема организации управления системой.
Литература:
- Поезжаева Е. В. Промышленные роботы: учеб.пособие: в 3ч. / Е. В. Поезжаева. — Пермь: Изд-во Перм. гос. тех. ун-та,2009. — Ч.2. — 185 с.
- Проблемы механики современных машин: Материалы V международной конференции. — Улан-Удэ: Изд-во ВСГУТУ, 2012. — Т. 3. — 276с., ил. — Поезжаева Е. В., «Шагающий робот с контурной системой управления», с. 227.
- Поезжаева Е. В., Васенин А. С., Шумков А. Г. Роботизация фермерских хозяйств по обработке растений // Вестник Восточно-Сибирского государственного университета технологий и управления. 2014. № 3, с. 59–62.
