





В системе транспортирования горной массы по горизонтальным выработкам рудничный электровозный транспорт занимает доминирующее положение. Он многофункционален, имеет наибольший коэффициент полезного действия, обладает высокой экологичностью. Однако опыт его эксплуатации выявил ряд существенных недостатков. К ним относятся: высокий травматизм, низкий срок службы электромеханического оборудования подвижного состава, что влияет на необоснованное увеличение эксплуатационных затрат.
Указанные обстоятельства определяли и определяют необходимость и целесообразность совершенствования технических средств рудничного электровозного транспорта. Создавались новые системы привода электровозов, системы дистанционного управления движением поездов в местах погрузочно-разгрузочных работ, системы задания и реализации маршрутов следования составов к местам погрузки и разгрузки горной массы. Но при их разработке не учитывались особенности работы систем тягового электроснабжения, светофорной сигнализации, показатели надежности погрузочных, разгрузочных пунктов, особенности работы смежных добычных и перерабатывающих комплексов. Поэтому совершенствование отдельных узлов рудничного электровозного транспорта не давало положительных результатов.
Эффективным направлением рудничного электровозного транспорта является автоматизация, направленная на обеспечение его работы без постоянного присутствия обслуживающего персонала, в том числе, машинистов электровозов.
Следует отметить, что первые работы по обоснованию и разработке систем автоматизации рудничного электровозного транспорта опубликованы в 50-тых годах прошлого столетия в работах профессора Ленинградского горного института (ныне Горный университет) Рысьева Анатолия Васильевича. В последующие годы на основе системного анализа предложены взаимосвязанные системы автоматического пуска поездов, исключения их столкновений, задания и реализации рациональных маршрутов следования составов.
Предложено рассматривать автоматический пуск поездов в два этапа:
- Трогание «собранного» поезда с места, характеризующееся повагонным началом движения состава и наличием значительных динамических усилий в сцепных устройствах, которые в несколько раз превышают допустимые по условию усталостной прочности.
В результате проведенных исследований разработана методика определения рационального закона изменения тягового усилия при трогании «собранного» состава с места. Его реализация с применением средств автоматики обеспечила равенство эквивалентных усилий в сцепных устройствах поездов на уровне величины, ограниченной заданным предприятием-изготовителем сроке службы.
- Разгон «растянутого» поезда до заданной скорости, характеризующейся отсутствием зазора в сцепных устройствах и наличием переменного сцепления колес электровоза с рельсами, что является специфической особенностью рельсового пути горных предприятий. Это определяет повышенное боксование колес электровоза, а следовательно, увеличенное потребление электроэнергии (до 40 % от общего потребления), частый выход из строя тяговых двигателей, повышенный износ бандажей колес электровозов.
Разработана и прошла промышленную апробацию автоматическая система пуска поездов (АСП), обеспечивающая назначенный срок службы сцепных устройств вагонетки поезда, реализацию силы тяги электровоза в зоне упругого скольжения. Срок службы тяговых двигателей увеличен в 4 раза. Уменьшилось потребление энергии на 30 %.
Одной из главных систем автоматизации рудничного электровозного транспорта является автоматическая система исключения столкновений поездов (АСИС) при их следовании по разветвленной транспортной сети откаточного горизонта. Действие АСИС основано на разбиении транспортной сети на контролируемые и управляемые блок-участки. На каждом блок участке может находиться только один поезд. При наличии аварийной ситуации останов поезда осуществляется автоматически путем подачи специального сигнала на электровоз или отключением напряжения на блок-участке. Протяженность блок-участка рассчитана на размещение поезда (длина поезда lп), наличие требуемого пути торможения (lт) и гарантированного расстояния, обеспечивающего безостановочное движение поездов по секционированной транспортной сети откаточного горизонта.
Разработана методика расчета параметров секционированной транспортной сети и предложены на уровне изобретений разнообразные схемы расположения точечных датчиков контроля местонахождения поездов. В настоящее время предложены три типа подсистем блокировки блок-участков, отличающиеся расположением датчиков, принципом работы устройств блокировки и функциями систем аварийного останова следующих друг за другом поездов.
Предлагается усовершенствованное устройство блокировки блок-участков секционированной контактной сети.
Известно устройство блокировки занятости блок-участков секционированной контактной сети [1], функционирование которого основано на применении релейной схемы управления. Данное устройство входит в систему автоматического управления движением поездов рудничной электровозной откатки.
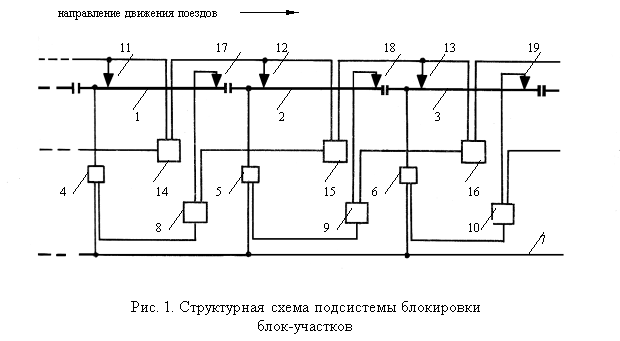
Структурная схема подсистемы блокировки блок-участков секционированной транспортной сети откаточного горизонта представлена на рис.1.
Принцип работы предлагаемого устройства заключается в следующем. Безопасность движения следующих друг за другом поездов по секционированной транспортной сети осуществляется за счет создания между ними безопасного расстояния
![]() , (1)
, (1)
где ![]() – минимальное безопасное расстояние между поездами П1 и П2, движущимися по смежным блок-участкам, м; lп– длина состава поезда, м; lг– гарантированное расстояние блок-участка, обеспечивающее безостановочное движение поездов, м; lт — минимальное расстояние тормозного пути поезда, м.
– минимальное безопасное расстояние между поездами П1 и П2, движущимися по смежным блок-участкам, м; lп– длина состава поезда, м; lг– гарантированное расстояние блок-участка, обеспечивающее безостановочное движение поездов, м; lт — минимальное расстояние тормозного пути поезда, м.
Изначально все секции 1,2,3 контактной сети находятся под напряжение и подключены к общей сети электроснабжения 7. Выполнение условия (1) является нормальным режимом движения поездов, при котором каждая изолированная секция контактной сети подключена к общей сети электроснабжения через соответствующий управляемый выключатель (4,5,6). На каждом блок участке располагается по два путевых датчика: первый датчик (11,12,13) — путевой датчик движения, расположен от начала изолированной секции на расстоянии, равном длине состава поезда lп; второй датчик (17,18,19) расположен от конца секции на расстоянии, равном длине тормозного пути lт поезда.
В случае опасности возникновения аварийной ситуации, т. е. при невыполнении условия (1), а именно, при
![]() , (2)
, (2)
изолированная секция контактной сети, расположенная между движущимися друг за другом поездами, автоматически отключается с помощью управляемого выключателя. Вслед идущий поезд автоматически затормаживается, не выезжая на занятую предыдущим поездом секцию, чем обеспечивается исключение столкновения поездов. Каждый электровоз оснащен системой автоматического торможения поезда [2].
После освобождения предыдущим поездом занятой секции, и выезде его на последующую, а также при выполнении условия (1), вслед идущий поезд может выезжать на указанную секцию. При этом восстанавливается нормальный режим движения поездов по транспортным путям откаточного горизонта.
Циклограмма работы автоматического устройства в случае необходимости отключения изолированной секции контактной сети между поездами с помощью автоматического выключателя Вiпредставлена на рис.2.
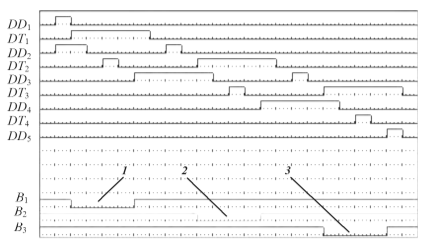
Рис. 2. Циклограмма работы автоматического устройства
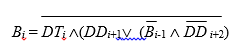
На основе использования метода циклограмм (рис.2) составлено логическое выражение для выходного сигнала управляемого выключателя Вiсоответствующей i-ой изолированной секции контактной сети с учетом сигналов от датчика движения DD и датчика торможения DТ.
 (3)
(3)
где Вi — управляемый выключатель соответствующей i-ой изолированной секции контактной сети;
DDi — датчик движения поезда на i-м блок-участке;
DТi — датчик торможения поезда на i-м блок-участке.
Автоматическое устройство обеспечения безопасности движения поездов рудничного электровозного транспорта было реализовано на базе программируемого логического контроллера Simatic S7–400 фирмы Siemens с использованием программного обеспечения Simatic Step 7.
Применение программируемого логического контроллера взамен релейной схемы позволяет снизить время реакции автоматической системы безопасности движения на возникшую транспортную ситуацию, повысить пропускную способность и безопасность движения поездов рудничного электровозного транспорта.
Литература:
- А.с.1172803.Устройство блокировки занятости блок-участков контактной сети / В. Н. Кордаков, О. Б. Лакота. — Опубл. в Б. И., 1986, № 30.
- Б. Г. Анискин, В. Н. Кордаков, О. Б. Лакота.Электровозный транспорт на горных предприятиях, проблемы и решения. Журнал «Горные машины и автоматика». Москва, 2003г. № 15, с.13.
- А.с. 935330. Устройство для торможения электровоза / В. Н. Кордаков, О. Б. Лакота — Опубл. в БИ., 1982, № 22.
