В статье автор исследует свой проект агродрона «Нектарик» для искусственного опыления растений.
Ключевые слова: беспилотные авиационные системы, дрон, экология, пчела, искусственное опыление.
В прошлом году я занималась исследовательской работой «Насекомые-опылители Ленинградской области» в сфере экологии. В свете значительного сокращения популяции пчёл на планете, вопрос опыления с помощью беспилотных авиационных систем (БАС) пробуждает всё больше внимания. Пчёлы постоянно подвергаются заболеваниям, влиянию пестицидов и климатическим изменениям, и их вымирание на настоящий момент угрожает 40 % насекомым-опылителям. Тем не менее, именно эти насекомые ответственны за 80 % всего объёма опыления растений. В использовании беспилотных летающих и наземных устройств видится потенциальное решение данной проблемы. Если людям не удастся снизить темпы гибели пчёл, то уже к 2035 году медоносная пчела может исчезнуть из списка опылителей.
Разработан макет дрона-пчелы «Нектарик» (рисунок 1). Задача данного проекта заключается в разработке автоматизированного метода опыления сельскохозяйственных полей. Он будет способен осуществлять опыление посевов с воздуха.
Развитие технологий влияет на все сферы человеческой жизни. Например, цифровизация и роботизация привели к изменениям в авиационной технике. Стали создаваться различные беспилотные летательные аппараты, выполняющие самые разные задачи. В моей творческой работе задуман проект агродрона «Нектарик», который при успешной реализации и проведения полевых испытаний позволит осуществлять искусственное опыление растений.
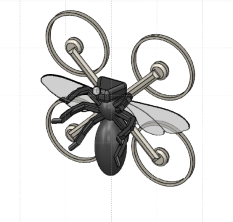
Рис. 1. Макет дрона-пчелы «Нектарик»
Ещё летом 2023 года правительство утвердило стратегию развития беспилотных авиационных систем до 2030 года и на перспективу до 2035 года. За это время в стране должна появиться новая отрасль, связанная с созданием и использованием гражданских беспилотников. Девять процентов объёма всех заказанных услуг с применением беспилотных авиационных систем в мире приходится именно на сельское хозяйство. По данным стратегии: «Анализ российской практики внедрения беспилотной авиации в производственные и операционные процессы обеспечил следующие эффекты на предприятиях и в хозяйствах, являющихся передовыми с точки зрения внедрения беспилотных авиационных систем: в области сельского хозяйства — в 2 раза выросла производительность труда, на 12,8 % сократились расходы на средства защиты растений, удельный рост сбора урожая по отдельным культурам увеличился на 10–30 % при росте издержек, связанных с высокотехнологичными обработками, лишь на 2–4 % пункта в общей структуре затрат» [1].
В мире существуют разработки дронов-пчёл для опыления:
– Прототип дрона-пчелы уже смог поучаствовать в эксперименте с японскими лилиями (Lilium japonicum). Основной компонент роботизированной пчелы — ионный жидкий гель (ILG) — изобрели случайно. Один из авторов исследования, химик Эйджиро Мияко (2007 г.).
– В 2012 г. американской компанией «Walmart» представлены автономно работающие пчёлы-роботы. На этих пчёлах установлены камеры и датчики, помогающие роботам отыскивать и опылять посевы. Теперь, доработанные модели, отличают культуры, требующие опыления, и совершают посадку только среди нужных посевов. Ещё, эти пчёлы-роботы, способны работать в дождь и сильный ветер, когда живые насекомые «сидят по домам».
– 2014 год — год рождения искусственных пчёл, которых создали учёные Варшавского политехнического института. Эти пчёлки, перенося пыльцу, двигались с помощью 4-х колёс, но результат получился положительным.
– Новое изобретение сделали учёные Делфтского технического университета, Голландия. Их робот, весом 29 г, при развёрнутых крыльях составляет 33 см и держится в воздухе 6 мин., пролетая 1 км, делая 17 взмахов крыльями за секунду. Эти «пчёлки» научились останавливаться, замирая на одном месте, лететь по выбранному направлению, и даже делать 360-градусные обороты. Летают пчёлы-дроны со скоростью 24 км в час.
– 2018 год — стартап из города Сиракузы (штат Нью-Йорк), под названием «Dropcopter», успешно использовал гексакоптеры на нескольких культурах, включая миндаль, яблоню, вишню и грушу. За три года испытаний использование опыления с помощью дронов увеличило урожайность на 25–50 %» [2].
Пчёлы постоянно подвергаются заболеваниям, влиянию пестицидов и климатическим изменениям, и их вымирание на настоящий момент угрожает 40 % насекомым-опылителям. Тем не менее, именно эти насекомые ответственны за 80 % всего объёма опыления растений. В использовании беспилотных летающих и наземных устройств видится потенциальное решение данной проблемы. Если людям не удастся снизить темпы гибели пчёл, то уже к 2035 году медоносная пчела может исчезнуть из списка опылителей [3].
В моей работе новым аспектом является возможность искусственного опыления с помощью выдвигаемого мини-манипулятора (хоботка) из головы пчелы для переноса и распыления пыльцы.
Мой дрон-пчела состоит из формы экзоскелета пчелы и прототипа квадрокоптера (четыре пропеллера). Искусственное насекомое сделано из пластика, а также имеет секции для хранения и распыления пыльцы. Для распыления пыльцы есть выдвигаемый мини-манипулятор (хоботок) из головы пчелы для переноса и распыления пыльцы. «Нектарик» касается цветка манипулятором, затем перемещается на другой цветок и несколько раз касается его своим манипулятором.
Пока в начальном варианте планируется, что «Некатриком» будет управлять не бортовой компьютер, а внешние камеры и компьютер «наземной станции». Дрон для опыления работает также, как и для получения изображений — он следует заранее заданному плану полета, имеет контроллер и т. д. Но вы можете настроить скорость, с которой дрон опыляет культуры, для достижения определенных параметров. Камеры позиционируют цветки, компьютер рассчитывает оптимальный маршрут, «Нектарик» взлетает и направляется к ближайшему цветку. После того, как он добирается до цветка и собирает пыльцу, он перелетает на другой, затем на следующий и так далее, пока не облетит все цветы (пока на это хватает батареи). Сама пыльца содержится в устройстве, которое может и рассеивать пыльцу из дрона. Крылья пчелы могут быть сделаны из углеродного волокна. Чертёж дрона-пчелы «Нектарик» в разных проекциях приведён на рисунке 2.
Нельзя не заметить, что дополнительную мощность придают два крыла. Еще одно преимущество их использования заключается в том, что они значительно упрощают управление роботом. Использование четырёх пропеллеров и двух крыльев позволяет управлять тремя осями вращения: рыскание, наклон и крен (yaw, pitch, roll). Для этого применяются различные комбинации скорости и амплитуды движений крыла. Частота движений крыла остаётся неизменной, около 160 Гц, а амплитуда означает, насколько далеко крыло движется вперед и назад за каждое движение. Изменение скорости движения крыла означает более медленный ход в одном направлении, за которым следует более быстрый ход в другом направлении, сохраняя при этом частоту движения на прежнем уровне, что позволяет осуществлять рыскание.
Тем не менее, даже с таким управлением по трём осям, стабильное управление роботом остаётся пока непростой задачей для данного проекта.
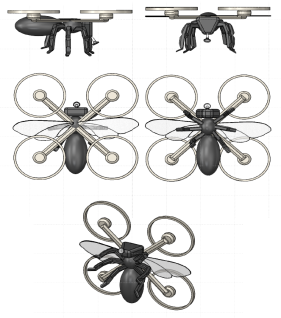
Рис. 2. Чертёж дрона-пчелы «Нетарик» в разных проекциях
Оценка дополнительных функций БАС
В перспективе после сборки и проведения полевых исследований возможно рассмотреть оснащение «Нектарика» набором датчиков (гироскоп, акселерометр, датчик оптического потока, лазерный дальномер), микроконтроллером, повышающим преобразователем и суперконденсаторами. Пьезоэлектрические приводы могут быть задействованы для питания БАС. Робот будет способен поднимать дополнительные 260 мг. Этого должно хватить для датчиков и батареи (или суперконденсатора) [4].
Полный комплект датчиков можно скомплектовать весом около 200 мг, а систему питания ещё около 260 мг.
Чтобы преодолеть это препятствие и ещё больше увеличить грузоподъёмность, можно будет попробовать изменить ориентацию исполнительных механизмов так, чтобы крылья могли использовать аэродинамику, аналогичную как у крупных жуков.
Если при полевых испытаниях искусственно опыление покажет свою низкую эффективность, то можно будет поставить программный контролер в который заложить принцип «танца пчёл»[1] (рисунок 3). Например, круговой танец означает, что пища близко. Если танец виляющий — то значительно дальше. Направление виляния — направление к источнику, частота — расстояние [5].
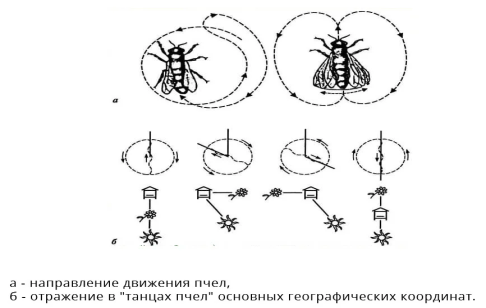
Рис. 3. Принцип «танца пчёл»
В итоге дрон «Нектарик» сможет не только опылять цветущие растения вместо исчезнувших пчёл, а своим танцем указывать насекомым места, в которых много нектара и пыльцы.
С последующим выбором материалов, коммерциализации результатов в школьном курсе «Беспилотные авиационные системы» на базе школьного Кванториума можно будет собрать макет дрона-пчелы «Нектарик».
По моему мнению преимущество данного продукта по сравнению с уже известными аналогами заключается в том, что использование четырёх пропеллеров и двух крыльев позволяет управлять тремя осями вращения: рыскание, наклон и крен (yaw, pitch, roll). Для этого применяются различные комбинации скорости и амплитуды движений крыльев пчелы.
В данном проекте я вижу себя, как проектировщик и частично создатель дрона-пчелы «Нектарик».
Разработан макет БАС дрона-пчелы «Нектарик» в форме экзоскелета пчелы и прототипа квадрокоптера (четыре пропеллера), который в последующем позволит проводить искусственное опыление перенос и распрыскивание пыльцы по заранее заданному плану полёта.
Оригинальным в проекте является выдвигаемый мини-манипулятор (хоботок) из головы пчелы для переноса и распыления пыльцы и использование четырёх пропеллеров и двух крыльев позволяет управлять тремя осями вращения: рыскание, наклон и крен.
Литература:
- https://www.svetich.info/publikacii/tochnoe-zemledelie/bespilotniki-v-selskom-hozjaistve-podder.html
- Материал на портале www.growingproduce.com
- https://hightech.plus/2018/07/05/droni-vozmut-na-sebya-rabotu-pchel
- https://habr.com/ru/articles/401491/
- https://pchelovod.com/novosti-pchelovodstva-v-mire/v-ssha-zapatentovali-robotov-pchyol-dlya-opyleniya-polej.html
[1] У пчёл существует свой особый язык, называемый танцем пчёл. Танцем пчёлы указывают другим пчёлам точное расположение место медосбора, направление, расстояние и количество нектара и пыльцы, опасности, отсутствии матки или места для нового жилища.

