В статье автор изучает проблему истощения актуальных земных ресурсов с целью создания модели космической робостанции, способной выполнять поиск кобальтовой и малахитовой руды на космических недрах.
Ключевые слова: космическая робостанция, полезные ископаемые, «зеленые» технологии, космические недра, Lego Mindstorms.
Рынок полезных ископаемых, которые помогают питать электромобили, ветряные турбины, солнечные батареи и другие технологии, имеющие ключевое значение для перехода к чистой энергии, удвоился за последние пять лет. Внедрение «зеленых» технологий спровоцировало огромный спрос на такие металлы, как кобальт и медь. [2] В качестве сырья для их получения могут использоваться кобальтовые и малахитовые руды.
Запас полезных ископаемых на нашей планете постепенно истощается. Для растущего населения Земли это представляет серьезную угрозу в будущем. Решением данной проблемы может стать освоение космических недр. Для выполнения такой задачи потребуются роботизированные станции и космическая инфраструктура. [3]
Поэтому уже сегодня я задумался о создании собственной модели космической робостанции, которая могла бы заниматься альтернативным поиском кобальтовой и малахитовой руды на астероидах, кометах и других небесных телах Солнечной системы.
В качестве платформы для создания робота использовалось третье поколение конструктора Lego Mindstorms EV3. Сначала необходимо было собрать каркас станции из балок и пинов, а затем установить моторы (рис.1). Для наилучшего прохождения космического робота по внеземному грунту применялись гусеницы со специальными зацепами.

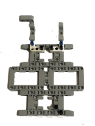

Рис. 1. Сборка каркаса и присоединение моторов
На каркас робота устанавливаем модуль EV3, который является самой главной частью космостанции. Он представляет собой программируемый блок, управляющий датчиками и моторами (рис.2).


Рис.2. Установка программируемого блока EV3
Для обнаружения объекта исследования подключаем к роботу датчик ультразвука с диаметром «зоны видимости» на расстоянии 35 см. Для идентификации малахитовой и кобальтовой руды на космических недрах был задействован датчик цвета, настроенный на распознавание зеленого и синего цвета (рис.3).



Рис. 3. Присоединение датчиков
Теперь необходимо соединить все датчики и моторы к основному блоку управления с помощью специальных кабелей. Работать такая космическая робостанция будет от аккумулятора с зарядным устройством. Готовый робот представлен на рис.4. [4]

Рис. 4. Готовая модель космической робостанции
Для автономной работы станции была разработана специальная программа в приложении LEGO MINDSTORMS Education EV3. Схема алгоритма состоит из последовательных блоков, позволяющих осуществлять конструирование поэтапно с наглядным исполнением каждого фрагмента и программы целиком (рис.5). [1, с.8]

Рис. 5. Пример записи линейного алгоритма на языке программирования EV3
Для того чтобы программист и робот понимали друг друга, роботу необходимо уметь подавать некоторые сигналы. В EV3 такими сигналами служат звуковые сообщения, которые может воспроизводить встроенный динамик микроконтроллера [1, с. 9]. Смоделированная космическая робостанция в процессе работы подает три звуковых сигнала: «Выполняется сканирование», «Объект обнаружен», «Возвращаюсь на базу».
Следующим этапом для исследований стал запуск робота, во время которого космическая станция успешно осуществляет захват кобальтовой и малахитовой руды с помощью удерживающего устройства, а потом транспортирует ее на базу (рис.6).
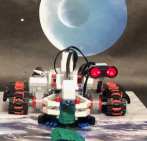

Рис. 6. Обнаружение малахитовой руды и транспортировка на базу
Для того, чтобы убедиться в чистоте работы космической робостанции, была выбрала руда, которая не содержит кобальт и малахит. Робот не смог ее идентифицировать как объект для исследований и проехал мимо (рис.7). Это ещё раз подтверждает успешность собранной модели и четкость работы датчиков, использованных в ней.

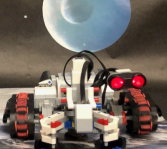
Рис. 7. Руда без содержания кобальта и малахита
Таким образом, в результате проведенных экспериментальных запусков становится совершенно очевидным, что создание космической робостанции может стать в будущем альтернативным способом добычи актуальных полезных ископаемых на космических пространствах.
Литература:
- Шадрин И. В. Учебное пособие по программированию в среде Lego Mindstorms EV3, г. Колпашево, 2017, 40 с.
- Интернет источник: https://www.finam.ru/publications/item/spros-na-litiy-kobalt-i-nikel-podskochil-iz-za-razvitiya-chistykh-tekhnologiy-20230712–1228/
- Интернет источник: Картотека: добыча ископаемых в космосе — Новости — Научно-образовательный портал IQ — Национальный исследовательский университет «Высшая школа экономики» (hse.ru)
- Интернет источник: https://educube.ru/

