В статье авторы описывают создание своего проекта — действующего макета поезда-магнитоплана. Ребята изучили физические принципы и законы, лежащие в основе устройства магнитного транспорта, разобрались в типах конструкций как настоящих маглевов, так и их макетов. Авторы разработали свою концепцию подвеса магнитного поезда и после приобретения разнообразных магнитных материалов и электронных компонентов провели множество серий испытаний для подбора оптимальных параметров и компонентов макета. В результате создан самостоятельно передвигающийся левитирующий поезд, обладающий бесконтактным, полностью магнитным приводом и не имеющим в конструкции мотора с вращающимися частями. Изготовленный макет может быть очень интересен и полезен школьникам при изучении соответствующих разделов физики.
Ключевые слова: магнитное взаимодействие, магнитная левитация, макет.
Использование магнитной левитации — новейшее направление развития железнодорожного транспорта. Такие поезда часто называют просто «маглевы» — от слов «магнитная левитация» или магнитопланами. Поезд или трамвай, использующий данную технологию, удерживается над полотном дороги, следует вдоль него и приводится в движение силой магнитного поля. Первыми в мире эту идею начали развивать в России в начале XX века. В 1910 г. Борис Петрович Вейнберг разработал концепцию и создал макет «магнитного поезда», перемещающегося в вакууме, а в 1914 г. он активно ездил по стране с публичными лекциями, посвященными данному проекту, стараясь сделать идею о сверхбыстром транспорте популярной.
На данный момент в мире действуют несколько маршрутов левитирующих поездов: в Китае, Японии, Южной Корее. Самым современным вариантом реализации маглева является китайский поезд корпорации CASIC, поставивший на испытаниях рекорд скорости: 623 км/ч.
По сравнению с рельсовым скоростным железнодорожным транспортом технология магнитной левитации обладает рядом преимуществ:
– феноменальная скорость — свыше 600 км/ч;
– высокая экономичность перемещения и низкая стоимость эксплуатации, обусловленные отсутствием трансмиссионных потерь и значительно меньшим износом пути вследствие отсутствия контакта с колёсами;
– экологичность, вызванная работой на электричестве, отсутствием вредных смазочных материалов, низким уровнем шумового загрязнения.
Помимо преимуществ, у скоростного магнитного транспорта есть ряд недостатков:
– создание линий маглева сложнее и дороже традиционных путей;
– высокоскоростное парение над полотном требует очень ровной поверхности без перепадов, кочек, изгибов, а также накладывает более сильные ограничения на радиусы поворотов, углы подъемов, профиль пути;
– путевая, станционная, обслуживающая инфраструктуры линий маглева несовместима с действующей железнодорожной инфраструктурой, поэтому требуются дополнительные вложения для дублирования всех необходимых элементов.
Эти особенности делают создание скоростного магнитного сообщения более трудоемким и значительно более дорогим. Поэтому окупаемость подобных транспортных проектов будет достигаться спустя десятилетия бесперебойной непрерывной работы, то есть можно назвать строительство линий магнитоплана стратегическими проектами, реализуемыми, прежде всего, на государственном уровне.
Разобраться с технологией использования электромагнитной левитации в транспорте, оценить ее перспективы нам поможет собственная модель поезда маглев, которую мы создадим самостоятельно. Тема взаимодействия магнитных полей очень интересна для нас, опыты по левитации выглядят фантастически, и поэтому хочется изучить это явление как можно подробнее, чему очень поспособствует создание действующего макета поезда-магнитоплана. Нам, как и многим другим ребятам, изучающим физику, очень бы пригодилась такая наглядная иллюстрация возможностей магнитного взаимодействия.
Объектом нашей проектной работы стало явление магнитной левитации, а предметом — макет поезда-магнитоплана.
Целью данного проекта является проектирование и постройка действующего макета поезда, удерживающегося над полотном дороги, приводимого в движение и управляемого силой электромагнитного поля.
Для достижения цели проектной работы нам предстоитрешить следующие задачи :
- изучение понятий и принципов, используемых при построении системы магнитной левитации на транспорте;
- изучение разных типов конструкции маглев и выбор конструкции для создания проекта исходя из технической сложности реализации и стоимости;
- проектирование, подбор компонентов для проекта;
- сборка макета поезда;
- тестирование макета, исправление ошибок и внесение доработок;
- проведение запусков, наблюдение и формулирование выводов.
Актуальность данного проекта заключается в том, что он отражает ближайшее будущее транспорта: магнитопланов будет становиться всё больше. Готовый макет может принимать участие в конкурсах технического моделирования для иллюстрации перспектив развития высокоскоростного сообщения. Также он может использоваться в процессе обучения физике для наглядного представления о взаимодействии магнитных полей.
В ходе реализации проекта мы использовали теоретические и эмпирические методы : поиск и анализ специальной литературы, статей в сети Интернет, 3D-моделирование, проектирование, конструирование, электротехнические расчеты, а также тестирование и наблюдение за полученными результатами.
1. Теоретическое описание
1.1. Типы магнитного подвеса
В конструкции нашего макета, как и у настоящего магнитоплана, самое главное — реализация магнитного подвеса. Магнитным подвесом в данной работе мы будем называть совокупность технических решений, которые с помощью взаимодействия магнитных полей поезда и пути обеспечивают три процесса: левитацию (зависание над полотном пути), курсовое следование (стабилизацию при движении по пути) и продольное движение (привод) состава.
Что касается настоящих левитирующих поездов, в литературных и интернет-источниках основным разделением типов магнитных подвесов является разделение по способу создания левитации [1]:
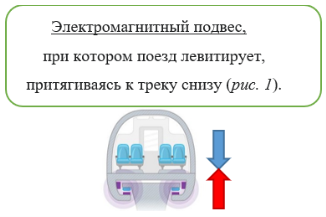
Рис.1. Схематичное изображение электромагнитного подвеса
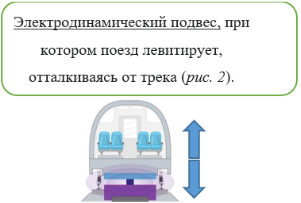
Рис. 2. Схематичное изображение электродинамического подвеса
Некоторые источники также выделяют отдельной категорией подвес на постоянных магнитах на поезде и пути, но он пока лишь тестируется и не скоро найдёт широкое применение в транспорте из-за очень высокой стоимости пути.
1.2. Электромагнитный подвес

Рис. 3. Притяжение электромагнита к рельсу
Электромагнитный подвес — такой способ создания магнитной левитации, при котором используется притяжение электромагнитов к пути. Для удобства будем называть его «П»-подвес . Это первое направление в разработке магнитных левитирующих поездов. В такой конструкции под поездом в специальных «крыльях», огибающих Т-образный рельс снизу, установлены электромагниты, которые притягиваются к рельсу из ферромагнитного материала, обычно стали ( рис. 3 ) [2].
Для стабильной левитации на одном уровне необходимо постоянно отслеживать положение магнита относительно рельса и очень точно корректировать питание. Существуют два подхода к обеспечению поперечной стабилизации в «П»-подвесе:
– использование разных наборов магнитов для левитации и стабилизации ( рис. 4 ).
– использование единого набора магнитов одновременно для левитации и стабилизации в сочетании с U-образным рельсом. Такой профиль обеспечивает поперечную стабилизацию ( рис. 5 ).

Рис. 4. Разные наборы магнитов для левитации и стабилизации
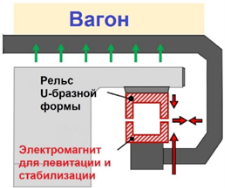
Рис. 5. Единый набор магнитов для левитации и стабилизации
На основе «П»-подвеса и его разновидностей построены линии Transrapid в Германии, в Китае. Из них на данный момент действующей является только линия в Китае длиной 30,5 км, соединяющая Шанхай с аэропортом. Кроме Transrapid существуют другие варианты линий с «П»-подвесом в Японии (Linimo), Южной Корее (EcoBee).
Несмотря на необходимость постоянного и точного контроля и корректировки работы электромагнитов, «П»-подвес в целом является конструктивно не сложным, лёгким в обслуживании, кроме того, при организации «П»-подвеса возможно полностью бесконтактное функционирование, так как левитация возможна на любой скорости.
Главным недостатком «П»-подвеса являются крайне высокие потери энергии при эксплуатации от преобразования тока, работы множества электромагнитов.
1.3. Электродинамический подвес
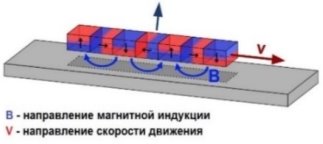
Ри. 6. Отталкивание магнитной сборки Хальбаха от пути в движении
В электродинамическом подвесе для левитации используются магнитные поля вихревых токов, индуцированных изменяющимся магнитным полем. Проводник в пути находится под действием переменного магнитного поля от магнитов на движущемся поезде. Из-за такого воздействия в проводнике, состоящем из проводящих полос или замкнутых контуров, возникают вихревые токи, или токи Фуко, которые создают магнитное поле, противостоящее первичному [3]. При движении поезда это поле отталкивает состав, он левитирует и движется за счет взаимодействия магнитных полей контуров пути и полей магнитов поезда ( рис.6 ) [4]. Такой подвес будем называть «О»-подвес . Сам путь представляет собой канал, где в стенках установлены проводники, по форме напоминающие цифру «8». Такая форма обеспечивает формирование разноименных магнитных полюсов в верхнем и нижнем витках. Это обеспечивает левитацию, отрывающую состав на скорости от полотна ( рис. 7, 8 ).
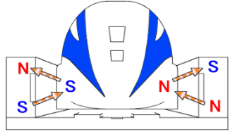
Рис. 7. Левитация поезда при движении
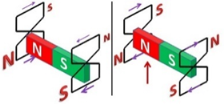
Рис. 8. Взаимодействие полей магнитов поезда и проводников при левитации
«О»-подвес обеспечивает самостабилизацию поезда. При уменьшении расстояния от поезда до пути или стены поле естественным образом усиливается, в результате чего поезд всё время стремится удерживаться посередине между стенками пути и на одном расстоянии от поверхности — около 10 см ( рис. 9, 10 ).
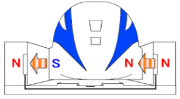
Рис. 9. Стабилизация поезда при движении
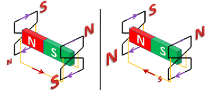
Рис. 10. Взаимодействие полей магнитов поезда и проводников при стабилизации
В системах с «О»-подвесом на поезде устанавливаются сверхпроводящие магниты. Эти мощные эффективные магниты охлаждаются до -273°C (0° по Кельвину) жидким гелием. Технология «О»-подвеса впервые применена в Японии при создании транспортной системы JRMaglev [5].

Рис. 11. Сборка Хальбаха
Кроме того, в «О»-подвесе могут использоваться постоянные магниты в виде «сборок Хальбаха» [2]. Это особая конфигурация постоянных магнитов, в которой магнитное поле с одной стороны сборки значительно сильнее поля с другой стороны, где оно практически полностью отсутствует ( рис. 11 ). Подобное решение получило название Inductrack, что можно перевести как «индукционный путь». «Inductrack» лежит в основе скоростных перспективных проектов систем Hyperloop от компаний SpaceX, Virgin и других разработчиков [8].
На всех поездах с «О»-подвесом используются выдвижные колёса для опоры поезда на стоянках, а также при езде до достижения скорости начала левитации. Это примерно 150–200 км/ч. При небольшой скорости магнитов индуцируемый в контурах ток недостаточно сильный для создания отталкивающего магнитного поля, способного удержать вес поезда.
1.4. Привод и питание левитирующих поездов
Левитирующие поезда движутся за счет линейных двигателей. Это такой электродвигатель, у которого один элемент магнитной системы имеет обмотки, создающие магнитное поле — статор , а другой взаимодействует с ним и может перемещаться продольно — ротор ( рис. 12 ) [4].

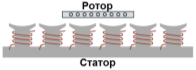
Рис. 12. Упрощенное строение линейного двигателя
В большинстве подвесов статор располагается на пути, ротор — на поезде. В роторе при этом размещены магниты. Такой привод называется линейным синхронным мотором. Магниты в роторе могут быть как постоянные (в «О»-подвесе), так и электромагниты (в «П»-подвесе) [5].
Питание подаётся на путь на катушки статора. Сам поезд для работы внутренних систем также содержит аккумуляторы. Отличие в том, что в «П»-подвесе необходимо питать электромагниты поезда. Для этого электромагниты конструктивно совмещены с линейными генераторами, которые бесконтактно получают питание от пути и подают его на магниты [4]. В «О»-подвесе необходимости получать питание от пути для движения нет.
1.5. Обзор видов конструкций макетов левитирующих поездов
Конструкции макетов левитирующих поездов широко представлены в сети Интернет. Почти во всех подвес обычно реализован размещением постоянных магнитов на поезде и на пути. В реальных магнитопланах использование такого подвеса — новейшее направление разработок, он используется только на испытательных участках из-за крайне высокой стоимости подобного пути из магнитов, но такой подвес хорошо применим для макетов. В основном, в макетах замкнутый трек отсутствует и представлен прямой фрагмент пути. Курсовая устойчивость обеспечена наличием боковых стенок. Привода может не быть ( рис. 13, 14 ), а может быть использован толкающий пропеллер, например, как на рис. 15 .
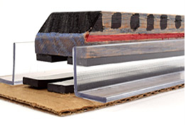
Рис. 13. Макет маглева без привода

Рис. 14. Макет маглева без привода

Рис.15. Макет маглева с приводом-пропеллером
Существуют более сложные реализации с линейным мотором для привода ( рис. 16 ) или с использованием сверхпроводимости, достигаемой охлаждением сухим льдом или жидким азотом ( рис. 17 ).

Рис. 16. Макет маглева с линейным мотором

Рис. 17. Макет маглева с охлаждением для сверхпроводимого магнита
Также существует проект, в котором команда студентов создавала макет на основе «П»-подвеса на прямом участке пути. Трек и магниты они изготавливали самостоятельно в инженерной лаборатории с использованием высокоточных фрезерных станков, 3D-принтера ( рис. 18, 19, 20 ).

Рис. 18. Самостоятельно созданный электромагнит

Рис.19. Испытание распечатанного на 3D-принтере корпуса

Рис. 20. Испытание всего макета
Изучив вышеизложенные конструкции настоящих левитирующих поездов и макетов, мы сформировали своё видение макета магнитоплана и приступили к его созданию.
2. Практическое описание проекта
2.1. Этапы создания макета
Мы сформулировали видение нашего проекта следующим образом: макет представляет собой замкнутый трек, на котором будет самостоятельно непрерывно двигаться левитирующий поезд. Для левитации в приводе будет использоваться только взаимодействие магнитных полей без механической составляющей, то есть будут отсутствовать подвижные элементы. Обеспечить курсовую устойчивость только взаимодействием магнитных полей представлялось крайне сложным, поэтому возможно использование опоры на одну или две вертикальных поверхности с помощью роликов. Трек будет овальной формы и общей длинной не более 100 см для удобного размещения на столе для демонстрации. Несущие магниты (они же опорные) на пути и на поезде будут постоянные. Привод будет основан на взаимодействии электромагнита и постоянных магнитов.
Создание макета включает в себя следующие этапы: проектирование, конструирование, испытания и анализ.
Проектирование:
– — определение габаритных параметров проекта (габаритов поезда, трека, магнитов), выбор магнитных материалов;
– проектирование левитации;
– проектирование стабилизации;
– проектирование привода;
– определение мест размещения магнитов поезда, выбор материалов для трека и поезда, приобретение материалов.
Конструирование:
– изготовление и сборка трека, корпуса поезда;
– промежуточное тестирование макета;
– декорирование макета;
– доработка при необходимости;
Испытания и анализ: финальные испытания макета, формулирование выводов.
Второй, третий, четвертый пункты проектирования — самые важные и самые сложные. Важные потому, что левитация, стабилизация и привод — это основа нашего макета, его сердце, и без их реализации проект создать невозможно. Сложные они потому, что действовать приходилось «вслепую», без ясных ориентиров по готовым макетам, без четкого представления о взаимном расположении магнитов для стабильного взаимодействия. Но эти задачи были решены.
2.2. Определение габаритных параметров проекта, выбор магнитных материалов
Подбор материалов и вообще какие-либо работы по проекту невозможно было начать без понимания будущих размеров его элементов. Ориентиром нам послужила плата E139814, которую мы использовали для создания электромагнитного привода. Ее физические размеры продиктовали габариты будущего поезда и ширину пути. Для создания поезда и трека были подобраны и заказаны различные соразмерные ферритовые магниты. Неодимовые магниты намного сильнее, но их стоимость оказалась бы слишком большой для нашей предполагаемой длины пути. Подробнее о компонентах макета мы расскажем ниже в соответствующих разделах. Имея различные магнитные материалы на руках, мы приступили к проектированию. Для проектирования мы не использовали программное обеспечение, действовали интуитивно, основываясь на знаниях и опыте, полученных при работе над теоретической частью данного проекта и работой над другими проектами.
2.3. Левитация
Левитацию мы решили организовать с помощью отталкивания одноименных полюсов постоянных магнитов на пути и поезде. В большинстве макетов используется именно такой способ левитации — он надежный и относительно недорогой. Выбор пал на ферритовые магниты в виде полос. Они намагничены по толщине, т. е. одна сторона у них имеет полюс N, другая — S. Установить их предполагалось по всему пути в два ряда подобно рельсам. Были закуплены несколько вариантов магнитных полос, прямоугольных магнитов. Они будут установлены на различные тестовые участки пути для испытаний. Забегая вперед, отметим, что магнитные полосы показали хорошую несущую способность, которой достаточно для уверенного удержания над полотном трека платформы с грузом. Решение по использованию данных магнитов в проекте для левитации было принято.
2.4. Стабилизация
Реализация стабилизации только магнитными полями — очень непростая задача. Если достигнуть определенным расположением магнитов устойчивого зависания на месте и удастся, то добиться стабильного движения, особенно в повороте, только взаимодействием магнитных полей крайне трудно. Установка опорных стенок с двух сторон решила бы проблему, но была нежелательной, так как мешала бы наблюдению за поездом и портила бы вид, поэтому мы приняли решение создать «магнитную» яму, то есть стремление поезда переместиться внутрь трека, и опору на одну внутреннюю стену через ролики. Это не так сильно бы закрывало обзор и обеспечивало стабильное передвижение вдоль пути, включая повороты. Будущую систему стабилизации можно представить как показано на рис. 21 .

Рис. 21. Поезд на треке с опорой на стену через ролики
2.5. Привод
Так как магнитный подвес нашего поезда должен обеспечивать движение без использования подвижных частей, для привода необходимо использовать линейный мотор. Статор мотора — «дорожка» из чередующихся постоянных магнитов разной полярности, а ротор — электромагнит, переключающий полярность при движении таким образом, что поля статора и поля ротора взаимодействуют, создавая движение. Мы решили не располагать статор в одной плоскости с несущими магнитами трека, так как было опасение, что будет «смешение» полей двух систем магнитов. Очевидное решение — расположение статора на опорной стене.
Поиск в Интернете, запросы на тематических форумах позволили найти нам возможное готовое решение для ротора — плата E139814 производства CHING YU ELECTRIC ENTERPRISE от некоего лабораторного аппарата, в котором она использовалась как раз в линейном приводе ( рис. 22 ). Основные элементы платы: электромагнит с 3 полюсами (S-N-S или N-S-N), два датчика Холла (они определяют расстояния от магнитов и их полярности) для переключения полярности электромагнита, чип с программой, контакты для подключения питания ( рис. 23 ). Были приобретены 2 платы.
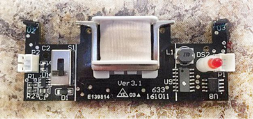
Рисунок 22. Плата с электромагнитом и датчиками Холла
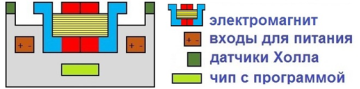
Рисунок 23. Схематичное изображение устройства платы привода
Далее необходимо было создать «магнитную дорожку» из следующих попеременно секций N и S нужной длины. Такие готовые ленты мы не нашли, поэтому приобрели несколько разных листов магнитного винила. Это такой плоский гибкий лист, намагниченный таким образом, что состоит из чередующихся полос N и S. С помощью магнитного индикатора магнитные поля визуализировались и подбирались варианты с секциями нужной длины ( рис. 24 ).

Рис. 24. Использование магнитного индикатора
В результате подходящий лист был найден и разделен на полосы. Полученные полосы соединяются в одну дорожку и крепятся к опорной стене. Работу привода можно описать следующим образом: в магните переключается полярность таким образом, чтобы взаимодействие отталкивающих и притягивающих сил магнитных полей электромагнита и трека создавало движение электромагнита. Момент переключения определяется на основе сигналов с датчиков Холла ( рис. 25 ).

Рис. 25. Взаимодействие полей магнита и пути в двух режимах работы магнита
2.6. Определение способа размещения несущих магнитов поезда, эскиз будущего макета, выбор материалов
Как мы указали выше, несущие магниты должны быть расположены таким образом, чтобы поезд прижимался к внутренней части трека и упирался в стену через ролики. Для большей стабильности магниты лучше разместить на углах вагона. Движение прямо и повороты для магнитов на наружной части трека не представляют трудностей. Проблема возникает у магнитов на внутренней части поворота: при прохождении кривой магниты на углах поезда находились бы над магнитами пути лишь частично, уменьшая отталкивание. Отсюда решение: смещение в центр магнитов, которые движутся по внутреннему радиусу ( рис. 26 ). В упрощенном виде наш проект выглядит как показано на рис. 27 .
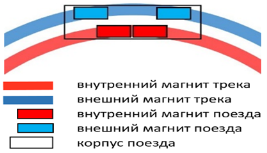
Рис. 26. Размещение несущих магнитов на поезде
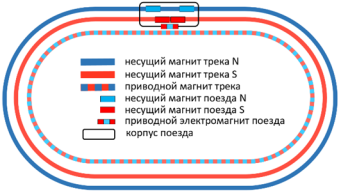
Рис.27. Эскиз будущего макета
Трек и опорную стену мы решили делать из листов оргалита. Он хорошо обрабатывается, прочный, недорогой. Недостаток оргалита для нас в том, что он не переносит влагу, коробится, поэтому наш макет должен эксплуатироваться в сухих закрытых помещениях. Корпус поезда, основание, лоток для батарей будут распечатаны на 3D-принтере. На нижней части корпуса будут располагаться углубления для крепления магнитов, во внутренней части будет установлена плата с электромагнитом и 2 элемента питания типа ААА по 1,5В. Также на внутренней стороне вагона будут установлены оси для крепления пар опорных роликов.
2.7. Изготовление трека, корпуса поезда и сборка
Порядок выполнения работ по конструированию нашего проекта был следующий:
- Создание трека, опорной стены. Ширина полотна пути диктуются размерами поезда, который, в свою очередь, определился размерами платы. Это были первые параметры будущего макета, которые удалось определить. Радиус поворотов, определяющий также ширину будущего макета, формировался шаблонами, используемыми для изгиба полос из оргалита, в качестве шаблонов выступали круглые табуреты разного диаметра и другие элементы мебели, вокруг которых изгибали полосы. Радиус поворота подбирался экспериментально таким образом, чтобы было возможно без складок уложить несущие магниты, и чтобы поезд не слетал с пути при повороте.

Рис. 28. Вырезанная основа трека
Треки мы вырезали из листа оргалита, предварительно разметив внешний контур ( рис. 28 ). Также из оргалита была изготовлены полосы для опорных стен. Перед изгибом мы держали полосу оргалита над паром, чтобы смягчить и избежать заломов. Стену закрепляли с помощью столярного клея. В итоге два подходящих для постройки поворота нужного радиуса табурета мы поставили рядом вверх ногами вплотную и обвели вокруг них овал — так сформировался внутренний контур будущего полотна пути.
- Создание тестовых вариантов поезда для проведения испытаний . Были смоделированы в программе Siemens NX и напечатаны на 3D-принтере разные варианты оснований, корпусов для тестирования будущего поезда. Форма и размеры основания выбирались таким образом, чтобы разместить и закрепить в направляющих приводную плату, ролики на осях. Снизу на основании предусмотрены углубления для удобной установки несущих магнитов поезда ( рис. 29 ). Также были изготовлены несколько корпусов ( рис. 30, 31 ).
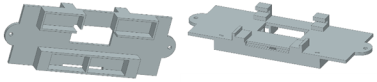
Рис. 29. Одна из 3D-моделей основания поезда
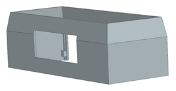
Рис. 30. Одна из 3D-моделей корпуса поезда
Корпус должен быть одновременно легким, открытым для доступа сверху и не иметь стенку с внутренней стороны. Корпуса и основания подгонялись, дорабатывались в домашних условиях ( рис. 32 ). Длина основания составила 92 мм, ширина 32 мм.
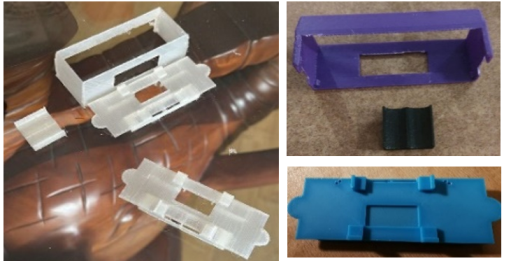
Рис. 31. Напечатанные корпуса, основания, лотки для батарей
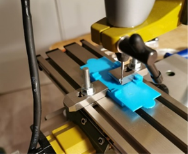
Рис. 32. Доработка основания поезда
- Проведение испытаний на тестовых поездах для определения оптимального положения несущих и приводного магнитов, выявления недостатков конструкции основания и корпуса, трека. На фрагментах пути и стены мы расположили разного размера несущие и приводные магниты в различных вариантах для поиска стабильной левитации и опоры, для определения высоты закрепления роликов ( рис. 33 ).
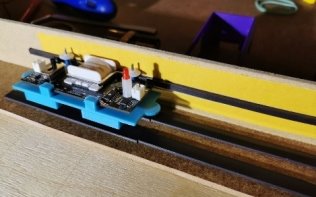
Рис. 33. Тестовая тележка без батарей на фрагменте пути
На прямом участке трека испытания различных вариантов расположения прошли быстро, оптимальное положение и высота привода были найдены. После прямых мы продолжили испытания на поворотах разного радиуса для поиска подходящего. Тесты на кривых выявили проблемы при движении: при прохождении поворота опорные ролики не доставали до стены и поезд «прилипал» к приводному магниту, внутренние нижние углы всех корпусов слишком выступали и мешали движению. Для решения проблемы с опорой на ролики была доработана стена — ей добавили толщины опорной зоны над и под приводным магнитом в повороте путём наклейки полос, вырезанных из ПЭТ-листа. Отверстия для осей роликов в основании поезда были перенесены ближе к краю. Для решения проблемы с корпусом были немного срезаны его углы. Кроме того, увеличившаяся толщина стены в повороте повлекла за собой необходимость перекладки несущих магнитов дальше от стены в зоне поворота. Также было принято решение использовать более толстые и сильные внутренние магниты трека. Внутренние магниты поезда и трека смещены друг относительно друга, и именно этот сдвиг пары внутренних магнитов обеспечивает «сваливание» поезда внутрь трека и опору роликами на стену, тем самым стабилизируя поезд поперечно. Увеличение толщины внутренних несущих магнитов трека придает составу большую устойчивость.
Также тесты выявили значимость места и способа крепления батарей, так как их положение существенно оказывало влияние на развесовку поезда.
- Покраска трека и установка несущих и приводных магнитов. После проведения испытаний и устранения недостатков можно было устанавливать несущие и приводные магниты по всему пути согласно найденному в тестах оптимальному расположению. Но перед этим мы покрасили трек серебристой краской ( рис. 34 ). После высыхания краски мы начали устанавливать магниты.

Рис. 34. Покраска трека
Рис. 35. Изготовленные шаблоны для установки магнитов
Для более точной установки магнитов мы изготовили из листа ПВХ ряд шаблонов на 9 мм, 8 мм для укладки магнитов на пути. Толщина 9 мм использовалась для промежутка между несущими магнитами пути, шаблон 8 мм — для укладки магнита внутреннего радиуса (см. рис. 35 ). Для прямого участка мы сделали длинный шаблон, для кривых мы изготовили шаблоны в виде столбиков. Также мы сделали шаблон 12 мм для установки приводного магнита.
2.8. Проведение первичных испытаний собранного макета
Пришло время запустить поезд на полностью собранном треке с целью выявления и устранения возможных дефектов. Запуски показали, что поезд ведет себя стабильно на всем пути, размеры и положение всех магнитов были выбраны правильно.
2.9. Декорирование макета
Чтобы придать жизнь макету, сделать его законченным, мы решили украсить центральную его часть миниатюрной ландшафтной композицией. Своё место нашли трава, деревья, кустарники, пруд, мостик, забор, колодец и несколько животных. Кроме того, мы решили изготовить новый современный красивый обтекаемый корпус поезда. Запас отталкивающей силы нашего подвеса позволял использовать более массивный корпус. Были смоделированы и распечатаны пара новых оснований и корпусов ( рис. 36 ).

Рис. 36. Новые обтекаемые корпуса поезда
2.10. Доработка трека
Через день после украшения макета мы обнаружили, что многие приводные магниты и некоторые несущие магниты отклеились. Мы переклеили все магниты трека более сильным клеем, чтобы не сталкиваться с этой проблемой в будущем ( рис. 37 ). Для повторной поклейки мы также использовали наши изготовленные шаблоны ( рис. 38 ).

Рис. 37. Повторная установка несущих магнитов
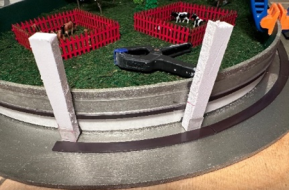
Рис. 38. Использование шаблона для установки магнита
2.11. Проведение финальных испытаний и формулирование выводов
Спустя время после завершения украшения и доработки трека мы осмотрели его, убедились, что все магниты и другие элементы трека крепко держатся на своих местах, и приступили к заключительным испытаниям.
Мы включили поезд, поставили его на трек, подтолкнули для начала движения, и поезд постепенно стал набирать скорость. И прямые участки, и повороты поезд проходил, левитируя, опираясь на стену, без провалов, схождений с пути. Для остановки поезд надо поймать рукой. Направление движения поезда может быть любым и задается направлением первоначального подталкивания рукой. Мы сделали несколько серий «старт — движение — остановка» в разные стороны, в течение которых поезд вел себя стабильно без каких-либо проблем. Испытания прошли успешно! Мы завершили работы над макетом, протестировали его и можем сформулировать выводы:
– подвес на постоянных магнитах подходит для макета поезда-магнитоплана. Он позволяет создать стабильную левитацию на разного размера треках и поездах после подбора подходящих магнитов:
– поперечную стабилизацию поезда создать только взаимодействием магнитов трудно. Приходится использовать одну или две стены для опоры;
– электромагнитный привод с датчиками Холла хорошо подходит для макетов. Его создание осложняется отсутствием в свободной продаже готовых решений. Приходится или использовать платы от линейных приводов других устройств, или пытаться создавать самостоятельно;
– при создании макетов левитирующего транспорта настоятельно рекомендуем использовать магнитный индикатор. Он позволяет намного эффективней подбирать магнитные компоненты.
На рис. 39 можно увидеть, как выглядит наш готовый макет.

Рис. 39. Готовый макет поезда-магнитоплана
2.12. Альтернативная реализация проекта
Параллельно с началом работы над макетом, описанным выше, начались попытки создания такого подвеса, в котором не нужны были бы постоянные магниты. Левитация такой системы создаётся за счёт взаимодействия двух переменных магнитных полей, одно из которых создаётся обычной катушкой индуктивности, а второе (со стороны пути) создаётся из-за токов Фуко, которые создают встречное магнитное поле. Для этой цели мы намотали катушку индуктивности из медной проволоки диаметром 0,35 мм и с помощью автотрансформатора подали на неё переменный ток из бытовой розетки частотой 50 Гц, но пониженного напряжения (около 30 Вольт). При помощи родителей мы намотали почти два десятка катушек разного диаметра, сечения, с разным количеством витков, одинарных, двойных и тройных, опираясь на расчеты калькулятора индуктивности. Качество катушек мы проверяли как индикатором индуктивности, так и экспериментально. В результате одна из катушек может уверенно левитировать несколько секунд, но так быстро и сильно нагревается, что её необходимо отключать и долго остужать. Несмотря на успешную короткую левитацию, дальнейшее развитие идеи подобного подвеса не представляется возможным в домашних условиях. Возникшие трудности с преобразованием питания, охлаждением и другие требуют использования лабораторного оборудования и довольно затратны. На фото ниже ( рис. 40 ) представлена одна из катушек в момент левитации. Мы можем отчетливо наблюдать тень на алюминиевом профиле, т. к. катушка левитирует.
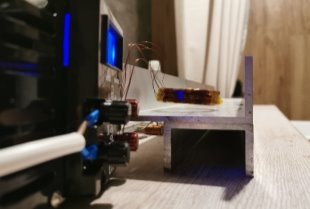
Рис. 40. Левитация катушки индуктивности
Перспективы развития проекта
В дальнейшем мы попытаемся усовершенствовать наш проект по следующим направлениям:
– изготовление трека из пластика для лучшего сопротивления влажности воздуха;
– создание поездов с двумя и более вагонами;
– оснащение поездов системой ограничения скорости, дистанционным управлением с пульта;
– реализация иной схемы установки несущих магнитов поезда, позволяющей проходить повороты в обе стороны;
– переработка устройства пути, системы стабилизации и привода таким образом, чтобы можно было обойтись без опорных стен.
Заключение
Итак, в рамках проектной работы поставленная нами цель достигнута: мы создали действующий макета левитирующего поезда. Главная сложность реализации проекта состояла в том, что приходилось действовать «вслепую», без готовых схем, расчетов, без подобранных компонентов. Для определения расположения элементов, как и для выбора самих элементов, пришлось выполнить множество тестов. Подбор компонентов сильно затрудняло отсутствие в продаже в России нужных магнитов — широкая номенклатура листовых магнитов, магнитных полос, намагниченных подходящим нам для постройки макета способом, была закуплена на зарубежных торговых площадках. Также долгим оказался поиск и заказ плат с электромагнитом для линейного привода.
В процессе реализации мы столкнулись с многими проблемами и успешно с ними справились. А еще мы использовали много ручного и электроинструмента для формирования трека, для доработки элементов корпуса.
Главной особенностью нашего макета является то, что нам удалось создать бесконтактный, полностью магнитный привод. Таким образом, наш поезд передвигается самостоятельно, не имея в конструкции мотора с вращающимися частями.
Важными и очень полезными для нас были полученные в процессе работы знания. Тема магнитного взаимодействия неразрывно связана с электричеством, это непросто для понимания, но мы старались во всем разобраться. Данный макет может быть очень интересен и полезен школьникам при изучении соответствующих разделов физики.
Мы с удовольствием работали над проектом, он актуальный и футуристичный. Мы отчасти почувствовали себя учеными-инженерами, как Борис Петрович Вейнберг 110 лет назад, когда он заглянул в будущее и увлеченно, с удовольствием, делился этим будущим с людьми.
Литература:
- Антонов Ю. Ф. Магнитолевитационная транспортная технология / Ю. Ф. Антонов, А. А. Зайцев; под редакцией В. А. Гапановича // Москва: ФИЗМАТЛИТ, 2014. — 476 с.
- Опарина Е. В. Основные типы магнитолевитационной транспортной технологии / Актуальные направления фундаментальных и прикладных исследований / Е. В. Опарина // Тип: статья в сборнике трудов конференции, 2022. — Страницы: 105–109.
- Перышкин А. В. Физика. 8 класс / Учебник. ФГОС / Под ред. Лонцовой Г. А. // Издательство: Экзамен, 2022 г. — 272 с.
- Йонас Кристиансен Ноланд / Перспективы и проблемы транспортной системы Hyperloop: систематический обзор технологий. — URL: https://ieeexplore.ieee.org/document/9350309.
- Cassat A, Jufer M — MAGLEV projects technology aspects and choices. IEEE Trans Appl Supercond 12(1): 915–925, 2002.
- Han HS, Kim DS — Magnetic levitation: Maglev technology and applications. Springer, Berlin, 2016.
- He, J.L.; Rote, D.M.; Coffey, H.T. — Study of Japanese Electrodynamic-Suspension Maglev Systems. — NASA Sti/Recon Technical Report N. Argonne National Laboratory, 1994.
- Track To The Future: Maglev Trains On Permanent Magnets Archived 27 March 2014 at the Wayback Machine. — Scott R. Gourley. — Popular Mechanics.

