На сегодняшний день много внимания уделяется изучению системы для обмена информацией между мозгом человека и электронным устройством. Это технология, которая позволяет человеку взаимодействовать с внешним миром на основе регистрации электрической активности мозга — электроэнцефалограммы (ЭЭГ). Желание человека совершить какое-то действие отображается в изменениях ЭЭГ, что, в свою очередь, расшифровывает компьютер. Эта система называется нейроинтерфейс — он же — «мозг-компьютер».
Ключевые слова: робототехника, Arduino, нейроинтерфейс, нефтегазовая промышленность.
Общие принципы нейрофизиологических систем
История нейроинтерфейса началась в 1875 году, когда английский доктор Ричард Катон обнаружил, что может зарегистрировать электрическое поле на поверхности мозга кроликов и обезьян. Первый нейроинтерфейс появился в 1950-е годы: профессор физиологии Йельского университета Хосе Мануэль Родригес Дельгадо изобрел устройство «Стимосивер», управляемое с помощью радиосигналов, а в 1963 году вживил его в мозг быков и управлял ими через портативный передатчик. В 1973 году впервые был употреблен термин «brain-computer interface» — нейроинтерфейс. В 1998 году ученый Филипп Кеннеди имплантировал первый нейроинтерфейс в пациента, парализованного после инсульта, — музыканта Джонни Рэя.
В России несколько лабораторий занимаются изучением нейроинтерфейсов. Так в лаборатории МГУ им. М.В Ломоносова была создана технология «Нейрочат», позволяющая людям с ограниченными возможностями общаться: гарнитура преображает мысленные усилия в команды для клавиатуры компьютера или других исполнительных устройств.
Нейроинтерфейсы также используются в области охраны труда при выполнении опасных работ, например, в газовой промышленности. К технологии начинает проявлять интерес бизнес, отдавая предпочтение различным игрушкам, управляемым «силой мысли». Однако в данной области существует ряд проблем. Специалисты отмечают, что для того, чтобы внедрять в здорового человека электроды, нет пока ни юридической, ни этической базы. Также нейроинтерфейс может сделать мозг человека объектом, в который захотят проникнуть правительства, рекламодатели, и др.
Мозг человека как центр управления роботом
Минимальной структурной единицей нервной системы является нейрон — клетка, которая самостоятельно или в ответ на приходящие нервные импульсы способна генерировать электрический ток. От тела клетки отходит длинный отросток-аксон, по которому нейрон посылает сигнал, а древовидные отростки-дендриты служат для приёма импульсов извне. Таким образом нейроны общаются друг с другом и воздействуют на другие клетки. Особенность нейронов — зависимость силы воздействия не от величины импульса, а от частоты, с которой нервные клетки генерируют их: чем выше частота, тем сильнее будет воздействие от этого нейрона.
Главным органом, осуществляющим управление всем организмом, является головной мозг. Он регулирует деятельность всех систем, ответственен за сознание, мышление, речь и другие функции, и является основным органом нервной системы, которая позволяет организму адекватно реагировать на различные события, получать и обрабатывать информацию. Сложность устройства головного мозга и широкий спектр решаемых им задач обусловлены огромным числом как самих нейронов, так связей между ними. Клетки мозга общаются между собой с помощью электрических токов. Зарегистрировать электрическую активность мозга можно с помощью специальных приборов — электроэнцефалографов. Для этого на поверхности головы располагают парные сигнальные электроды, а за ухом закрепляют опорный электрод, служащий для согласования электрической цепи прибора и тела человека. На практике используют систему из 20 электродов, одновременно регистрируя 10 сигналов из разных отделов мозга. Они усиливаются, фильтруются от помех и шумов и в итоге записываются на компьютере. Элекроэнцефалограмма (ЭЭГ) имеет сложную структуру, т. к. получается от суммарного воздействия миллионов нейронов и искажается из-за прохождения через мягкие ткани головы и череп. Однако существуют математические методы, которые позволяют анализировать такой сигнал.
Электрическую активность мозга можно представить в виде сумм волн определённой формы — ритмов ЭЭГ. Каждый ритм связывают с определённым видом деятельности или состоянием человека. В норме у бодрствующего человека можно наблюдать два ритма.
— α -ритм ЭЭГ выражен в затылочных отделах мозга и имеет наибольшую амплитуду в состоянии спокойного бодрствования. Если повышается внимание или мысленная активность, то амплитуда уменьшается. Характерно возникновение спонтанных изменений, выражающихся в чередующемся нарастании и снижении амплитуды волн.
— β -ритм представляет собой более частые колебания и присущ состоянию активного бодрствования. Выражен в лобной доле, но при различных видах деятельности усиливается и распространяется на другие области. Интенсивность возрастает при предъявлении неожиданного стимула, концентрации внимания, умственном или эмоциональном напряжении.
ЭЭГ и похожий метод электрокортикографии, при котором электроды накладываются в ходе операции на поверхность головного мозга, применяются в интерфейсах «мозг-компьютер», позволяя управлять внешними устройствами силой мысли. Например, парализованные люди могут заново научиться управлять манипулятором или экзоскелетом.
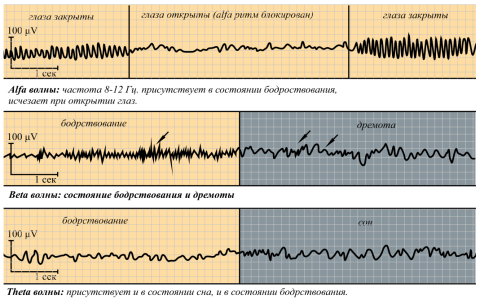
Рис. 1. Зависимость элекроэнцефалограммы от различных состояний человека
Электромиография. Управление роботом силой мышц
Сокращение мышцы обеспечивают миоциты — мышечные клетки. Их «двигателем» является актин-миозиновый комплекс, который состоит из двух белков. Актин формирует тонкие нити, которые прикрепляются к противоположным концам клетки. Когда в цитоплазме клетки повышается содержание ионов кальция, миозин прикрепляется к нити актина и делает «гребок». Таким образом миозин «шагает» по актину. Благодаря этому миозин сближает актиновые нити противоположных концов клетки и миоцит сокращается. Такой комплекс развивает небольшое усилие, но в мышце их очень много, поэтому она способна развивать большую силу. Миоциты — сократительные мышечные клетки, которые изменяют свою длину и развивают усилие. Миоцитам необходимо сообщить, что они должны сократиться. Для этого нейроны посылают электрические сигналы мышцам, а те в ответ сокращаются. Когда мы задумываем какое-то движение, в головном мозге активируются нейроны двигательной коры. Они передают сигналы в спиной мозг, где располагаются мотонейроны. В спинном мозге сигналы о сложном движении переводятся на понятный мышцам язык: когда и насколько нужно сократиться. Эти сигналы к мышцам поступают через мотонейроны, которые электрическими импульсами управляют мышцами.
Когда к миоциту приходит электрический импульс, внутри него начинает работать актин-миозиновый моторчик — мышечная клетка сокращается. При этом клетки становятся генераторами электрического тока. Сила сокращения определяется не величиной, а частотой приходящего сигнала. Чем чаще к миоциту приходят нервные импульсы, т. е. чем меньше промежуток времени между ними, тем большую силу он развивает, т. к. он просто не успевает расслабиться и остаётся в напряжённом состоянии.
Электромиография — метод, позволяющий измерить электрическую активность мышц во время их сокращения и после обработки сигнала сделать вывод о различных параметрах их работы. Внутри мышцы при её сокращении протекают малые токи — это проявление электрической активности мышечных клеток. Чтобы такую активность можно было измерить, используют специальные приборы — электромиографы. Они представляют собой сложные устройства, которые фильтруют электрический сигнал мышцы, очищая его от помех и шумов, а затем усиливают в десятки тысяч раз. Такой сигнал уже можно регистрировать и обрабатывать.
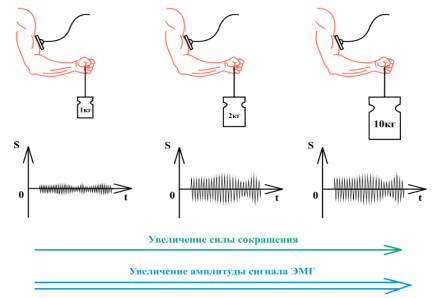
Рис. 2. Зависимость амплитуды ЭМГ-сигнала от силы сокращения мышцы
Электромиограмма представляет собой запись электрической активности мышечных клеток, а такой метод исследования мышц называется электромиографией (ЭМГ). Поверхностная ЭМГ объединяет электрические сигналы от тысяч клеток. При этом используют три электрода, которые прикрепляют на тело человека. Два из них (сигнальные электроды) передают электрический сигнал в электромиограф , а третий (опорный) служит для согласования электрической цепи прибора с телом человека, в том числе, чтобы обеспечить точность измерений и минимальные помехи. Зависимость измеренного напряжения между сигнальными электродами, служащего количественной мерой электрической активности миоцитов, от времени является сложной структурой, т. к. клетки сокращаются не одновременно, а сигнал, проходя сквозь ткани, искажается. Однако математические методы позволяют преобразовать его и извлечь информацию.
Разработка базовой модели робота
Разрабатываемый в рамках данного исследования робот представляет собой мобильную платформу, управляемую с помощью мышц или ЭЭГ-сигнала (альфа-ритм). Датчики подключаются к пульту управления, который связан с основным роботом с помощью bluetooth-соединения. Для сборки робота использованы следующие основные элементы: два блока EV3: один — для платформы, другой — для пульта управления; два больших мотора; один центральный модуль BiTronics Neurolab; один датчик ЭЭГ BiTronics Neurolab и два датчика ЭМГ BiTronics Neurolab.
Алгоритм сборки робота:
— собрать опору для установки двух больших моторов;
— собрать корпус платформы;
— установить на опору с моторами на основной корпус;
— собрать гусеничный механизм для передвижения робота;
— собрать опору для установки блока EV3 на работа;
— установить блок EV3, подключить моторы к блоку.
Ниже представлены фотографии основных этапов сборки.
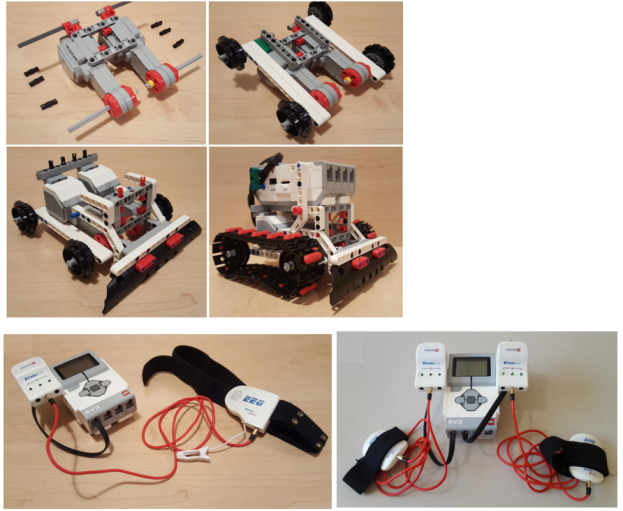
Рисунок 3. Фотографии основных этапов сборки робота, пультов управления ЭЭГ и ЭМГ-систем
Проектирование и программирование ЭЭГ и ЭМГ-системы
Для созданного робота были разработаны две системы управления — на основе ЭЭГ и ЭМГ-датчиков.
ЭЭГ-система управления роботом
— Программа для основного робота. Блок получает данные ЭМГ-датчика с пульта управления, сравнивает их с пороговым значением и запускает или останавливает моторы.
— Программа для блока управления. По бесконечному циклу считываются данные ЭЭГ-датчика, выводятся на дисплей и передаются по bluetooth-соединению на блок основного робота.
— ЭМГ-система управления роботом
— Программа для основного робота. По бесконечному циклу блок получает Bluetooth сообщения от пульта управления, заносит значения в переменные, сравнивает значения с пороговым значением для включения мотора (если значение, получаемое в сообщение меньше порогового, то записывается в переменную speed — 0, то есть останавливается платформа). Далее снова сравнивается значения переменных с пороговым значением и, если разность по модулю значений speed и speed2 попадает в заданный диапазон, то с заданной скоростью начинают работать оба двигателя (робот едет прямо); в противном случае — происходит непосредственное управление каждым мотором.
— Программа для блока управления. В программе одновременно выполняются две параллельные ветки. В первой — считывается значение первого датчика ЭМГ (переменная speed) и выводим на экран значение переменной speed2. Затем выводится на экран значение переменной speed и отправляется Bluetooth сообщение на мобильную платформу. Во второй — считывается ЭМГ сигнал со второго датчика (переменная speed2), отправляется Bluetooth сообщение на мобильную платформу.
Анализ влияния «качества» воздуха на здоровье человека
Практическая часть исследования связана с разработкой устройства для изучения состава воздуха. Для составления алгоритма работы необходимо установить допустимые значения концентрации газов в помещении (ПДК), температуры и влажности, а также изучить их влияние на здоровье человека.
1) Угарный газ (монооксид углерода, CO ) способен оказывать серьезный вред здоровью человека. Соединяясь с кровью человека, угарный газ образует карбоксигемоглобина (HbCO), концентрация которого также влияет на состояние человека. Так при содержании CO (мг/м 3 ) <100, HbCO 2.5–10 % у человека снижается скорость психомоторных реакций, возникает боль в груди, одышка. При содержании CO (мг/м 3 ) 600–800, HbCO 30–40 % человек становится раздражительным и эмоционально нестабильным, появляется головная боль, нарушается координация движений рук. Кома, конвульсии, обмороки, угнетение дыхания и летальный исход может возникнуть при концентрации CO (мг/м 3 ) от 1250, HbCO от 50 %.
2) Метан (СН 4 ). ПДК метана в воздухе рабочей зоны — 7000мг/м 3 . Метан относится к токсическим веществам, действующих на центральную нервную систему. При содержании в воздухе 25–30 % появляются признаки асфиксии, вызывают головную боль. Накапливаясь в закрытом помещении, метан взрывоопасен.
3) Сжиженные углеводородные газы ( LPG : бутан C 4 H 10 , пропан C 3 H 8 ). ПДК в воздухе — 300 мг/м 3 . При атмосферном давлении не обладает отравляющим воздействием, но попадая в воздух, вытесняет и уменьшает содержание кислорода. Человек, находящийся в такой атмосфере, будет испытывать кислородное голодание, а при значительных концентрациях газа в воздухе может погибнуть от удушья. Образуют с воздухом взрывоопасные смеси при концентрации пропана от 2,3 до 9,5 %, бутана от 1,8 до 9,1 %, при давлении 0,1 МПа и температуре 15–20°C.
4) Водород ( H 2 ). При смеси с воздухом образует взрывоопасную смесь — «гремучий газ». Наибольшую взрывоопасность имеет при объёмном отношении водорода и кислорода 2:1, или водорода и воздуха приближённо 2:5, так как в воздухе кислорода содержится примерно 21 %. В больших объёмах взрывоопасен и при меньшей концентрации.
5) Температура и влажность воздуха. Несоблюдение режима, указанного в санитарно-эпидемиологических требованиях, оказывает отрицательное воздействие на здоровье. Работа в таких условиях сопровождается интенсивным потоотделением, что приводит к обезвоживанию, вызывает стойкие изменения в деятельности сердечно-сосудистой системы, оказывает влияние на функционирование других органов — ослабляется внимание, ухудшается координация, замедляются реакции.
Проектирование анализатора воздуха. Алгоритм работы
Модуль «Газовый анализатор» выполнен на платформе Arduino Uno с использованием плат расширение и специализированных датчиков. Плата выполнена на базе процессора ATmega с тактовой частотой 16 МГц, обладает памятью 32кБ. Отличительной особенностью плат семейства Arduino является наличие «шилдов» (shields), т. е. плат расширения . Они позволяют использовать в проекте датчики, моторы и сервоприводы, локальную сеть или мобильную связь. В данном проекте для подключения датчиков к анализатору используется Troyka Shield. Для расширения возможностей устройства может быть использован GPRS Shield или Bluetooth HC-05 (информация о текущих показаниях датчиков; передача управляющих сообщений).
Для исследования состава воздуха использованы следующие датчики:
— Датчик широкого спектра газов MQ-2 способен определить концентрацию углеводородных газов (пропан, метан, н-бутан), дыма (взвешенных частиц, как результата горения) и водорода. MQ-2 относится к полупроводниковым приборам.
— Датчик угарного газа MQ-7 необходим для определения наличия и концентрации угарного газа (CO) в окружающей среде. Принцип работы этих двух сенсоров основан на изменении сопротивления слоя диоксида олова SnO 2 при контакте с молекулами газа. Чувствительный элемент — керамическая трубка с покрытием Al 2 O 3 и чувствительным слоем SnO 2 . Внутри трубки проходит элемент, нагревающий чувствительный слой до температуры, при которой он начинает реагировать на газ.
— Цифровой датчик температуры и влажности DHT 11 . Сенсор включает в себя резистивный компонент измерения влажности и компонент измерения температуры. DHT11 общается платой по собственному протоколу. Сенсор делает измерения только по запросу управляющей платы, благодаря чему достигается энергоэффективность.
— Troyka -модули зуммер и светодиоды. Используются для подачи сигнала в случае превышения ПДК одной из исследуемых величин.

Рис. 4. Arduino Uno, Troyka и GPRS Shield, MQ-2, MQ-7, DHT11
Процесс сборки устройства можно разбить на несколько этапов:
- Установка Troyka Shield на плату Arduino Uno.
- Подключение Troyka-модулей (датчиков, диодов, зуммера) с помощью 3-проводных шлейфов.
- Сборка корпуса. Для этого использовались пластины «Стурктора» — решётчатый конструктор из 5 мм вспененного ПВХ.
Программирование устройства. в среде Arduino IDE. Алгоритм:
— программно подключить датчики к платформе;
— настроить режим работы датчиков и их откалибровать;
— снимать показания с каждого датчика и выводить их в монитор порта;
— при превышении порогового значения какого-либо из измеряемых параметров включить красный диод и зуммер на время.
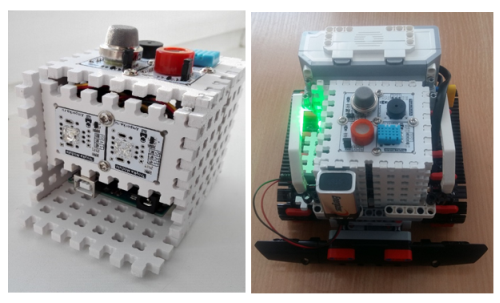
Рис. 5. Модуль «Газовый анализатор» и робот в сборке
Анализ результатов эксперимента
В ходе исследования был проведен ряд экспериментов в жилой комнате и закрытом помещении. На графиках ниже представлены фрагменты результатов проведенных экспериментов.
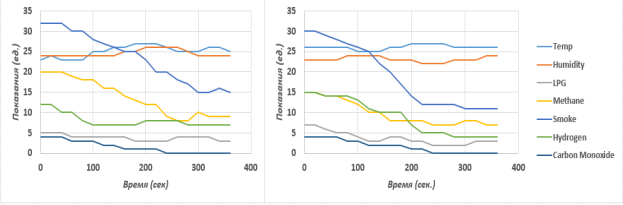
Рис. 6. Измерения параметров воздуха в жилом и в закрытом помещении
Используемые датчики MQ-2 и MQ-7 требуют начального прогрева. Это обусловлено их конструкцией и принципом работы, описанным выше. Из-за этого начальные данные являются зашумленными и не могут рассматриваться при анализе ситуации. Необходимо учитывать также этот факт при использовании робота на реальном производственном объекте.
Также были проведены измерения параметров среды в помещении, в ходе которых произошло искусственное загрязнение воздуха путем распыления смеси сжиженных пропана и бутана. Затем в место распыления было внесено пламя на короткий промежуток времени. После чего газ был распылен снова. Результаты эксперимента можно увидеть на графике ниже.
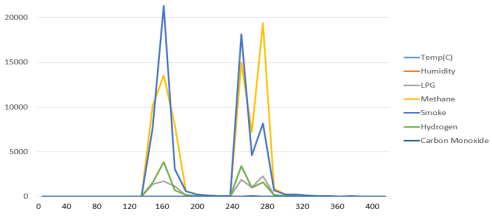
Рис. 7. Измерение параметров воздуха при искусственном загрязнении
Заключение
Разработанный в ходе исследования робот включает в себя специализированный модуль, используемый для измерения различных параметров воздуха. Для усовершенствования работы можно использовать более точные датчики и модули связи, которые будут иметь расширенный набор команд и позволять роботу выполнять их. Однако полная автоматизация также имеет противоречивые последствия: роботы не могут работать вне своей программы, например, в непредсказуемой ситуации — такие решения может принимать только человек. Поэтому требуется непосредственное участие человека в процессе выполнения роботом задач.
Использование роботов, основанных на работе нейроинтерфейсов, имеет множество плюсов. Во-первых, человек может управлять сразу несколькими механизмами, сокращая время работы на проектах, и используя более детальный подход к выполнению работ. Во-вторых, данные роботы могут стать незаменимыми помощниками для людей с нарушениями здоровья, помогать им совершать невозможные действия и вернуть полноценный образ жизни. Также внедрение роботов для работ в условиях, опасных для нахождения человека, позволит снизить риск угрозы для жизни.
Роботы подобного класса могут быть широко использованы в нефте- и газодобывающей отрасли. Например, в Сахалинской области эта отрасль является одной из ведущих . Проекты «Сахалин-1» и «Сахалин-2» обеспечивают основной объем добычи углеводородов — 89,2 % добычи нефти и конденсата и 85,7 % добычи газа. Обеспечение охраны труда, промышленной безопасности являются главными задачами при выполнении производственных работ. Несоблюдение требований может привести к происшествиям на производстве и представлять серьёзную угрозу для жизни и здоровья работника. При этом, работы в ограниченных и замкнутых пространствах относятся к производственным работам с повышенной опасностью. К данной категории относятся работы, проводимые на ограниченном объекте, не предназначенном для постоянного пребывания людей. Размер объекта достаточен для того, чтобы там поместился работник, но при этом может быть затруднен быстрый вход/выход и ограничен воздухообмен. В замкнутом пространстве существуют три вида опасности: недостаток или перенасыщение кислородом, воспламеняющиеся газы, токсичные вещества.
Нейроинтерфейсы могут прийти на замену людям, работающим в зонах риска и выполняющим опасные производственные операции в ограниченных и замкнутых пространствах. Разработанный в рамках данного исследования робот, оснащенный специализированными датчиками, может помочь обеспечить проведение исследования и измерений до начала работ в ограниченных замкнутых пространствах, а в процессе выполнения работ — постоянный мониторинг, следующих вредных и (или) опасных факторов производственной среды: недостаток кислорода; токсичные вещества — сероводород (H2S), углекислый газ (CO2), угарный газ (CO), метан; воспламеняющиеся газы (CH 4) , т.п.); температурный режим; влажность воздуха в рабочей зоне.
Литература:
- Банци М. Arduino для начинающих волшебников. — М.: Рид Групп, 2012.
- Блум Д. Изучаем Arduino. — СПб.: БХВ-Петербург, 2015.
- Добриборщ Д. Э. Основы робототехники на Lego Mindstorms EV3. Учебное пособие. — С-Пб.: Лань, 2019.
- Ковалева А. В. Нейрофизиология, физиология высшей нервной деятельности и сенсорных систем. — М.: ЮРАЙТ, 2016.
- Нейролаборатория BiTronics NeuroLab. Учебное пособие. — М.: изд-во МФТИ, 2017.
- Инженерный справочник DPVA.ru [Электронный ресурс]. URL: http://www.dpva.ru/Guide/GuideChemistry/Concentration/GasesConcentration/ (Дата обращения: 15.01.2020г.)

