Термины и определения
Мультикоптер — БПЛА, дрон с несколькими несущими винтами, от 3 и более.
Полётный контроллер — плата или модуль, контролирующий полёт БПЛА и непосредственно управляющий двигателями.
Дрон — обобщённое название беспилотных летательных аппаратов БПЛА.
Нейроинтерфейс (нейрокомпьютерный интерфейс (НКИ) — это связь между мозгом и компьютером, созданная для одностороннего или двустороннего обмена данными с помощью электрических сигналов.
Электрический двигатель — электрическая машина, в которой электрическая энергия преобразуется в механическую энергию
Используемые аббревиатуры
БПЛА — беспилотный летательный аппарат.
ВВП — вертикальная взлет и посадка.
ЛА — летательный аппарат.
МК — мультикоптер.
БК — бесколлекторные.
ЭД — электродвигатель.
ПК — полётный контроллер.
ПН — полезная нагрузка.
БКЭД — бесколлекторный электродвигатель.
ВМГ — винтомоторная группа.
РТК — робототехнический комплекс.
ИМК — интерфейс мозг-компьютер.
Введение
Главная тенденция в работах по совершенствованию систем технического оснащения и экипировки военнослужащих передовых стран мира в XXI веке связана с разработкой вооружения и военной техники нового поколения, оснащенных средствами интеллектуального управления, обладающих повышенной степенью автономности, надежности и качества функционирования в различных условиях боевой обстановки и воздействия внешней среды и являющихся одним из важнейших элементов в концепции ведения войн будущего.
Постановка проблемы: Успешное достижение главной цели любой военной операции обеспечивается рядом общих условий ее проведения. К ним помимо прочих относится максимальное использование разнообразных специальных и технических средств. Так как основное управление ими может осуществляться либо с помощью рук — посредством пульта и т. д.), мышц (датчики, вмонтированные в нижнюю одежду), речи (срабатывание на определенный голосовой вызов), либо с центрального пульта командующего спецоперацией, то боевая единица (военнослужащий) ограничена в выборе сопровождающих ее технических средств, что в условиях ведения боя или проведения спецопераций создает дополнительные риски. По состоянию на текущий момент техническое оснащение, которое могло бы применяться боевой единицей, имеет более высокий уровень развития (разнообразный диапазон применения) нежели возможность управления одновременно всем комплексом без привлечения помощи извне. Существует потребность в военнослужащих — операторах робототехнических средств, управляющих ими без привлечения имеющихся на данных момент механизмов управления.
Актуальность нашей работы состоит в том, чтобы на современном этапе развития технического оснащения военнослужащего (особенно военнослужащих спецподразделений Министерства Обороны Российской Федерации) разработать дополнительный ресурс, позволяющий осуществлять управление робототехническим комплексом (в нашем случае — беспилотным летательным аппаратом- БПЛА) с высокой степенью точности исполнения команд, посредством нейроинтерфейса — «силой мысли».
Элементом новизны работы является инновационный подход в создании дополнительного ресурса управления РТК, позволяющего решать поставленные боевые задачи на качественно новом уровне: посредством нейроинтерфейса.
Целью исследования является разработка оптимальной методики подготовки военнослужащего — оператора беспилотных летательных аппаратов к использованию интерфейса мозг-компьютер для управления ими для решения поставленных боевых задач;
Гипотеза: существование возможности натренировывать мозговую активность отдельной боевой единицы таким образом, чтобы команды, отдаваемые военнослужащим посредством нейроинтерфейса (силой мысли), высокоточно выполнялись внешним устройством, в нашем случае — беспилотным летательным аппаратом.
Практическая значимость — это выполнение военнослужащим боевой задачи во взаимодействии с беспилотным летательным аппаратом. При этом предполагается, что руки военнослужащего заняты оружием, а управление БПЛА он осуществляет посредством интерфейса мозг-компьютер (ИМК).
Поставленные задачи:
1. Изучение информационных источников.
2. Выбор тренировочной модели БПЛА и нейроинтерфейса и настройка системы их базовых параметров.
3. Проведение испытаний тренировочной модели посредством нейроинтерфейса.
4. Сборка собственной модели коптера, которая имеет качественные отличия от тренировочной модели. Предложения по усовершенствованию базовой модели коптера в целях выполнения боевых задач.
5. Основные этапы подготовки в нашей методике. Подбор основных этапов для создания методики обучения военнослужащих — операторов РТК посредством нейроинтерфейса.
6. Анализ результатов. Обзор перспектив.
Обьект исследования — интерфейс мозг-компьютер и его взаимодействие с беспилотным летательным аппаратом — дроном.
Предмет исследования — электрическая активность мозга и способы ее расшифровки, а также сама система интерфейс мозг-компьютер и взаимосвязь ее элементов.
Данная работа посвящена проектной проработке особенностей подготовки военнослужащих — операторов беспилотных летательных аппаратов с управлением посредством нейроинтерфейса мозг-компьютер путем создания алгоритма действий (методики).
Методы исследования:
− эмпирические (интуитивное (мысленное) моделирование, эксперимент);
− теоретические (анализ и синтез, обобщение результатов).
-
ТЕОРЕТИЧЕСКАЯ ЧАСТЬ
- Что такое нейроинтерфейс. Схема простого нейроинтерфейса. Его основные виды.
Проще понять, что такое нейроинтерфейс, когда сталкиваешься с другим его названием: интерфейс «мозг-компьютер» или нейрокомпьютерный интерфейс (НКИ). Это связь между мозгом и компьютером, созданная для одностороннего или двустороннего обмена данными с помощью электрических сигналов. Схема представлена в Приложении 1.
НКИ бывают трех видов, каждый из которых определяется способом передачи сигналов.
Инвазивные интерфейсы предполагают вживление электродов в мозг и обеспечивают прямую нейронную связь. Несмотря на высокую эффективность и чистоту сигнала, у этого вида есть серьезный недостаток — со временем нейроны теряют чувствительность, и для продолжения использования приходится устанавливать их вновь уже в другом месте.
В полуинвазивных нейроинтерфейсах электроды прикрепляются к поверхности серого вещества.
В неинвазивных — электроды устанавливаются на голове методом электроэнцефалограммы (ЭЭГ). Благодаря этому нет ограничений, связанных с потерей чувствительности, однако есть другие недостатки: продолжительность установки, смещение по мере использования, необходимость обновлять проводящий гель и невозможность прикрепить электрод к нужной группе нейронов. Из-за этих особенностей системам неинвазивных НКИ нужно обучаться определять сигналы каждого конкретного пользователя.
1.2 История и области применения нейроинтерфейсов
Если выбирать трех самых влиятельных исследователей в истории разработки нейроинтерфейсов, то это будут Филипп Кеннеди, Уильям Добелл и компания «Кибернетикс».
Невролог Филипп Кеннеди (PhilipKennedy) первым внедрил НКИ в мозг обезьяны в 1987 году, а в 1998 году — в мозг человека. После запрета ставить эксперименты над людьми, Кеннеди вживил электроды в собственный мозг, а затем удалил их после нескольких дней успешных тестов.
Врач и исследователь Уильям Добелл (WilliamDobell) в 2002 году частично вернул зрение пациенту с помощью нейроимпланта. Система НКИ Добелла включала в себя черно-белую камеру, дальномер и компьютер весом в пять килограмм, соединенный с электродами в коре головного мозга. Этого было достаточно, чтобы пациент проехал за рулем машины по парковке. После гибели Добелла в 2004 году пациент снова потерял зрение.
В 2005 году компания «Кибернетикс» (Cybernetics, США) добилась впечатляющих результатов по вживлению НКИ в человеческий мозг, который позволил пациенту управлять роботизированной рукой.
1.3 Сферы применения НКИ
Наука — Открытие сигналов мозга и их связь с деятельностью человека в свое время получило научный вес, сравнимый с исследованиями ДНК и расшифровкой генома человека. До сих пор научное сообщество познает работу мозга через его электропроводность, и каждый год происходят новые открытия.
Протезирование. Нейропротезы считаются стандартным методом решения проблемы потери слуха, используются для лечения некоторых заболеваний. На подходе управление экзоскелетами и роботизированными протезами рук и ног.
Медицина — Восстановление после повреждений мозга, позвоночника, инсультов, паралича — все это сферы, где успешно применяется НКИ.
1.4 Сложности применения нейроинтерфейсов
На данный момент уже существуют мультикоптеры управляемые при помощи НКИ. В 2014 году, российская компания Neurobotics представила первый дрон, управляемый при помощи электрических сигналов головного мозга, модель удерживала высоту при помощи барометра и ультразвукового датчика, а позицию за счет камеры направленной вниз, управление же осуществлялось двумя командами: движение вперед и поворот налево по собственной оси. Минусами коптера стали несколько факторов:
Задержка в управление (в среднем около двух секунд);
Трудное и долговременное обучение (чем больше команд требуется для управления дроном, тем больше навыков управления собственным мозгом придется освоить);
Максимальное количество команд, которое можно передать единовременно (далеко не всем удается совладать даже с двумя единовременными состояниями мозга);
Долгая подготовка неинвазивного нейроинтерфеса мокрого типа(калибровка, смачивание, правильное расположение датчиков);
Недолговременная работа без обслуживания (неинвазивный нейроинтерфейс мокрого типа требует регулярное смачивание специальным раствором);
Оператор должен быть полностью сконцентрирован на управлении дроном (любой внезапный внешний фактор может повлиять на команды отдаваемые дрону);
1.4. Моделируемые ситуации
Рассмотрим два примера, где может быть применен основной модельный сценарий:
1.4.1 Оказание первой медицинской помощи в боевых условиях
В боевых условиях первая медицинская помощь чаще всего оказывается неквалифицированными людьми, не имеющими никакого медицинского образования. Система передает показатели мониторинга физического состояния военнослужащего в режиме реального времени непосредственно самому военнослужащему и на центральный пункт начальнику медицинской службы посредством технических средств беспилотного летательного аппарата, также управляемого посредством нейрокомпьютерного интерфейса командира и/или оператора — военнослужащего спецподразделения. Теоретически аптечка лекарств может быть представлена разработанным стандартным набором ампул в шприцах, которые готовы к автоматическому впрыскиванию. В нашем проекте мы хотим подчеркнуть, что первая медицинская помощь раненым во время движения передового отряда к рубежу (району) его задачи оказывается в виде само- и взаимопомощи с участием передовых инновационных систем взаимодействия нейрокомпьютерных интерфейсов в отрыве от мест дислокации медсанчасти, что позволяет значительно удлинять время жизни военнослужащего.
1.4.2 Разведка территории и поиск раненых
Резко пересеченный рельеф местности, отсутствие возможности визуального наблюдения за полем боя, наличие множества ущелий, скал, крутых спусков и подъемов, завалов и т. д. крайне затрудняют разведку территории и розыск раненых. И здесь нам помогут БПЛА, находящиеся на вооружении военнослужащих спецподразделений, передающие данные местности непосредственно самому военнослужащему и на командный пункт.
Разведка местности непосредственно во время выполнения боевой операции: — военнослужащий бежит с автоматом, и тут по нему открывают огонь снайперы. Он бросается на землю и мыслями приказывает коптеру дать изображение с того направления, откуда ведется огонь. Изображение может передаваться на очки дополненной реальности. Военнослужащий при этом лежит, не двигаясь, оружие из рук не выпускает… Генерация команд, связана с использованием специальных психотехник: человек в нужные моменты представляет те действия, которые система может распознать и идентифицировать. Например, он может представить, как сжимает кисть правой руки трижды.
- ПРАКТИЧЕСКАЯ ЧАСТЬ.
2.1 Подбор оборудования.
Для практической проверки работы неинвазивного интерфейса воспользуемся системой — Puzzlebox Orbit: Brain-Controlled Helicopter — (Приложение 2 рис. 1):
— это интерактивная модель вертолета, которая взлетает от сигнала мозга — изделие, подходящее для презентаций, мероприятий и исследований. В комплекте кейс DIY проекта на KickStarter и хитрое техническое решение передачи управляющего сигнала через аудиовход мобильного устройства (Приложение 2 рис 2). Технические возможности Brain-Controlled Helicopter позволяют управлять им при помощи сигналов мозга — производить полет с изменением направления и высоты.
Это одноканальный ЭЭГ интерфейс. Гарнитура оснащена двумя датчиками. Один основной, рабочий датчик, который располагается в районе точки в левой лобной части головы, непосредственно над левым глазом. Второй датчик является индифферентным. Он выполнен в форме ушной клипсы и крепится к мочке левого уха. Эта точка рассматривается, как место отсутствия биоэлектрической активности. Таким образом, система получает ЭЭГ сигнал на разнице потенциалов между исходным сырым ЭЭГ сигналом и нулевой точкой. Таким образом, интерфейс, получая сигнал от головного мозга, передает его далее на смартфон. Передаются следующие данные: параметры концентрации (внимательности) и медитации (ментальной релаксации).
Установлены ворота трассы для гонок дронов — испытательный полигон для полетов Brain-Controlled Helicopter (Приложение 2 рис.3).
После проведения необходимых калибровок и настроек нейроинтерфейс готов к управлению полетом модели вертолета.
2.2 Основные этапы практической части
Для достижения требуемого нам результата — разработки методики подготовки военнослужащего-оператора БПЛА посредством нейроинтерфейса — мы определили основные этапы исследования:
2.2.1 Подготовительный этап — знакомство с навыками управления дроном с пульта на симуляторе управления полетом дрона.
Симулятор моделирует полет дрона таким образом, что будущий оператор видит, как на экране монитора в режиме реального времени дрон реагирует на его команды с пульта. Задачей этого этапа было наработать навыки управления дроном (для неподготовленного пользователя-военнослужащего) и наработать реакции головного мозга на нестандартные ситуации при полете дрона: каким образом можно его выровнять при падении, каковы особенности направленного полета при изменении скорости. После большого количества тренировок мозг каждого из нас привык к специфике движения виртуального дрона. Предполагаем, что одно только наблюдение этого действия будет модулировать активность нейронов головного мозга. То есть мы пытались сформировать образ движения. И, как потом показал третий и самый важный этап испытаний, нам это сделать удалось!
2.2.2. Учились с пульта управлять дроном (на улице), тренируя связку мозг-мышцы-рефлексы взаимодействовать таким образом, чтобы мозг запоминал это взаимодействие во время полета дрона. Исходили из того, что стадию обучения управлению мышцами (фактически — внешними по отношению к нему исполнительными механизмами) мозг в обязательном порядке проходит в младенчестве. Поэтому мы особо не задумываемся при выполнении привычного движения, например, сохраняя баланс при скольжении на коньках: генетически закрепленные схемы и благоприобретенные навыки автоматически решают задачу, не требуя нашего внимания. Наши мышцы достаточно точно расшифровывают намерения мозга. Но при обращении с нейроинтерфейсом уже сформировавшийся мозг должен будет адаптироваться к совершенно новым условиям. Мы наблюдали за полетом дрона и представляли, что эти действия совершал наш мозг.
2.2.3. Далее мы попробовали взять за основу то, что кодирующими намерения человека становятся внешние (или внутренние) стимульные объекты, а фокус внимания человека к тому или иному объекту лишь выдает его намерение. (Бюллетень сибирской медицины, 2013, том 12, № 2, с. 21–29). Что нужно представить или на чем нужно сосредоточиться, чтобы дрон начал движение? Шли методом подбора, причем для каждого из нашей команды этот подбор стал уникальным (индивидуальным).
Каждый из нас индивидуально нарабатывал навыки приведения дрона в движение. Активно «нарабатываем» образы. Фиксируем наиболее удачные значения в индивидуальном листе испытаний.
Испытуемый надевал гарнитуру и начинал активно думать (например, проговаривалась про себя теорема по геометрии, представлялись различные объемные фигуры), это психическое усилие (намерение) изменяло биопотенциалы, эти изменения регистрировались и отображались на компьютере, далее проводилась классификация этих биоизменений и давалась расшифровка намерений, а затем посредством формирования команд для коммуникации осуществлялось управление дроном. Программное обеспечение настраиваем на простейшие команды. На экране монитора (в нашем случае телефона) мы видим четыре шкалы: показатели 1-концентрации, 2-медитации, 3- степени прилегания датчиков гарнитуры и 4- работы дрона. Далее мы пробуем послать сигнал дрону и попробуем им управлять. В процессе испытаний мы натренировываем образ, представляя который испытуемый заставляет дрон двигаться в нужном направлении. Ищутся такие образы, которые наиболее эффектно влияют на электроэнцефалограмму. Фото процесса испытаний представлено в Приложении 3.
Работа нейроинтерфейса настроена в нашем исследовании таким образом, что дрон реагирует как на концентрацию, так и на медитацию. При достижении одним из этих показателей максимально допустимой величины, дрон начинает движение. Снимаем в каждом опыте показатели концентрации (зеленая шкала) и медитации (красная шкала) и оцениваем степень достижения результата.
Каждая сессия состоит их 10 последовательных опытов с перерывом в пределах 1 минуты. Сессий за одну тренировку — три. Сессии чередуются по количеству участников эксперимента — три (одна через две). В целом одна сессия для одного участника занимает с учетом индивидуальной настройки оборудования 20–25 минут.
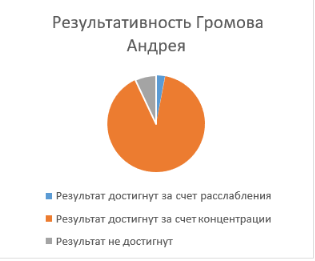
Испытуемый 1 — Громов Андрей — чтобы настроиться на работу с максимальной концентрацией, представлял и прочитывал в уме теорему по геометрии, представляя ее написанной на доске. Также в отдельных случаях представлял движения дрона. Чем сложнее для Андрея был представляемый образ (например, представлял картинку, когда воображаемый куб пересекает синусоидальная волна — какой она оставляет след?), тем быстрее концентрация достигала порогового значения для движения дрона: см Приложение 4.
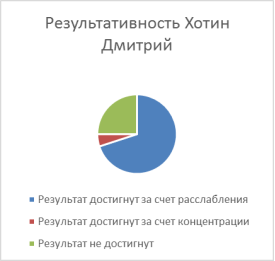
Испытуемый 2 — Хотин Дмитрий — чтобы настроиться на работу применил в части опытов метод концентрации и в части опытов — метод медитации с минимальной концентрацией внимания. Из 100 опытов достигнут полет по заданной траектории в 75 опытах. В динамике достижения результатов опытным путем получил, что индивидуально для Хотина Д. методом расслабления получается гораздо быстрее и надежнее достигать поставленной задачи. Соответственно, большая часть оставшихся опытов проводилась методом медитации: см Приложение 4.
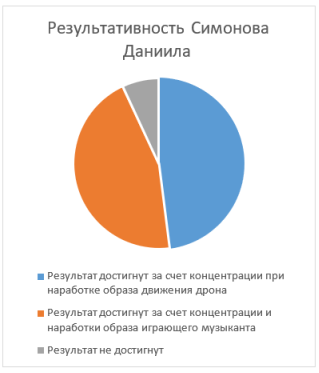
Испытуемый 3 — Симонов Даниил — задача для данного суворовца заключалась в том, чтобы при чередовании сессий часть опытов проходила при максимальной концентрации — представляя в воображении движение дрона, мысленно направляя его по заданной траектории, в части опытов нужно было не представлять непосредственно движение дрона, а размышлять на посторонние темы. По результатам работы заметил индивидуальную особенность — чем ближе был к нему дрон, тем легче удавалось сконцентрироваться, соответственно быстрее выполнялась поставленная задача. Для опытов, в которых предлагалось думать о чем то постороннем, не связанным с движением дрона, активно нарабатывался образ играющего музыканта (возник спонтанно, предположительно из-за увлечения суворовца музыкой): см Приложение 4.
2.3 Разработка и самостоятельная сборка изделия
Приобретенная нами презентационная модель очень помогла нарабатывать образы для нашего исследования, но не позволяет нам провести полноценные испытания. Для этого мы разработали и собрали собственную модель дрона.
Для решения этой задачи требуется подобрать оптимальный набор комплектующих — см. Приложение 5:
1. Полетный контроллер.
2. Рама (несущая конструкция, на которой располагаются все элементы мультикоптера).
3. Регуляторы оборотов (управляют оборотами бесколлекторных двигателей и являются промежуточным звеном в связке ПК-двигатель).
4. Бесколлекторный двигатель.
5. Воздушный винт.
6. Аккумулятор.
7. GPS/ГЛОНАСС (модуль, отвечающий за позиционирование и ориентацию мультикоптера в пространстве).
8. Приемник и передатчик сигнала управления.
9. FPV система (представляет собой связку видеокамеры, видео передатчика, монитора, видео приемника).
10. Нейроинтерфейс (связь мозг-компьютер):
11. Микрокомпьютер:
В итоге у нас получается квадрокоптер управляемый «силой мысли» при помощи нейроинтерфейса с максимальной дальностью полета в 4 км и временем 30 минут. Новизна разрабатываемого квадрокоптера заключается в создании перспективного образца новой технологии, основные составные части которой, уже существуют. К ним относятся — существующие нейроинтерфейсы, и отдельные узлы и элементы для сборки функционирующей модели квадрокоптера.
Анализ нашей работы показывает, что гипотеза, поставленная нами в начале нашей работы, подтверждается. Результат наших наработок — это подтверждение в перспективе возможности обучения военнослужащих (по разработанным методикам индивидуальной подготовки, так как для каждого человека подбирается свой алгоритм расшифровки сигналов электрической активности мозга) выполнению боевых задач с участием беспилотных летательных аппаратов, управляемых посредством нейроинтерфейса. Хотим отметить, что исследовательская составляющая данной работы — это стартовое звено в наших дальнейших изысканиях с учетом прогресса в области нейроинтерфейсов и в техническом оснащении индивидуального снаряжения военнослужащего. Приоритетной задачей этих испытаний были и остаются разработка надёжных алгоритмов обработки регистрируемой информации.
Результат
1. Для того, чтобы возможность использования военнослужащими РТК, управляемыми НКИ была осуществлена, предлагаем усовершенствовать имеющееся на текущий момент снаряжение военнослужащего спецподразделения — Приложение 5, дополнив его специальным устройствами:
1. Приемник и передатчик (например, будет использоваться 433 mhz LoRa дальность действия до 4х километров).
2. Нейроинтерфейс, который монтируется непосредственно в шлем бойца.
2. Предлагаем алгоритм подготовки военнослужащего — оператора БПЛА посредством нейроинтерфейса:
Используемый нейроинтерфейс управляет роботизированным устройством — беспилотным летательным аппаратом — дроном, который осуществляет движения в заданных направлениях.
Для обучения военнослужащего — оператора нейроинтерфейса важно определить уникальную, присущую ему схему подготовки. Единого алгоритма наработки образов нет, но есть основные общие этапы, которые можно использовать при обучении:
1. Предварительный этап: Знакомство с устройством уже готового оборудования с целью определения основных параметров дополнительного снаряжения. Ознакомление с системой закрепления дополнительного оборудования. Тестирование на знание основных принципов работы с программным обеспечением. Тестирование степени владения пользовательскими программами. Анкетирование образа жизни бойца, его увлечений и т. д. — для дальнейшей визуализации образов, наиболее подходящих каждому. Задача инструктора на данном этапе заключается в том, чтобы максимально раскрыть потенциал военнослужащего, определить основные черты его характера, понять образ жизни и его увлечения. Выделить эмоции при занятии самым любимым и/или самым нелюбимым делом.
2. Этап 1: Работа на программах-симуляторах, воспроизводящих обстановку при выполнении боевой задачи, а также маневренность дрона. Степень успешных прохождений траекторий виртуального дрона должна быть максимальной — 100 %. Задача инструктора на данном этапе — ознакомить ученика с правилами обращения с дроном, пояснить тонкости использования и научить взаимодействию пока без участия нейроинтерфейса и настоящего дрона в условиях виртуальной реальности. Будущий оператор нейроинтерфейса должен привыкнуть к новому устройству. Военнослужащий может виртуально погрузиться в условия выполнения спецоперации — предполагаемой особенности местности, погодных и климатических условий, понять зависимость точности выполнения команд дрона от этих условий. Данный этап обязателен для всех уровней подготовки военнослужащих, так как на нем отрабатывается не только управление дроном, но и симуляция уникальной обстановки для выполнения будущих боевых задач. Принятие правильных решений определяется на этом этапе.
3. Этап 2: Работа с дроном, управление которого осуществляется с пульта. Обязательный этап для удачного обучения при работе с нейроинтерфейсом — это отработка траекторий движений и запоминание этих движений (образов) мозгом. Оно происходит автоматически. То есть у нас есть возможность натренировывать свой мозг на создание и устойчивое поддержание этих образов. Задачей инструктора на данном этапе является выстраивание наработанной схемы управления дроном. Работа военнослужащего с пультом для успешного прохождения маршрута дроном должна быть доведена до автоматизма. Для этого создаются сессии по 5–7 количеству прохождений с изменениями параметров траектории движения или других показателей. Количество наработок индивидуально, в среднем необходимо 40–50 сессий.
4. Этап 3: Непосредственно тренировка навыков управления дроном: создание индивидуальных образов, подбор условных реакций мозговой активности для получения требуемого результата. Для этого каждому военнослужащему разрабатывается тестовая программа испытаний, чтобы определить и наработать те образы, которые максимально справляются с поставленными задачами (в нашем случае это движение дрона по заданной траектории). Метод (медитации или концентрации) подбирается индивидуально. Метод концентрации подбираем на основе представлений непосредственно о траектории движения, или сторонних представлений в зависимости от результатов предварительного анкетирования. Военнослужащие-спортсмены могут представлять движения своего тела на тренировках (например, сильный удар ногой), увлекающиеся музыкой — образы гитариста, проведение шоу- концерта и т. д. Наработка образов в данном случае — основная задача инструктора. Назначая тренировочные сессии, инструктор должен владеть статистическими данными по предыдущим сессиям, чтобы конкретизировать тот образ, который был в них получен.
Заключение
Нейроинтерфейсы — потенциально очень мощная технология, она способна существенно изменить не только человеческое общество, но и самого человека, каким мы его знаем сегодня. Именно нейроинтерфейсы вместе с искусственным интеллектом и биотехнологиями будут способствовать превращению человека в новый кибербиологический вид, и далее — в новый тип организации материи, называемый футурологами и философами мыслящей материей.
Технология интерфейса мозг–компьютер в первую очередь, безусловно, ценна своими возможными практическими приложениями. Ученые впервые получили концептуальный инструмент, который ставит мозг человека в уникальную экспериментальную ситуацию — прямого подключения к внешнему миру.
Перспективы: Представленный в проекте анализ может быть использован техническими специалистами для обоснования новых технологических решений в области робототехники посредством нейроинтерфейсов, а также военными специалистами для разработки новых форм и способов вооруженной борьбы с учетом перспектив развития робототехнических комплексов военного назначения, управляемых посредством нейроинтерфейса.
Преимущество новой технологии ИМК — в расширение манипуляторной способности военнослужащего. Команды исходят непосредственно от головного мозга управляющего этими устройствами человека. Сигнал к исполнению невозможно уловить (как, например, при управлении с пульта) и соответственно определить местоположение и намерения бойца.
Приложение 1
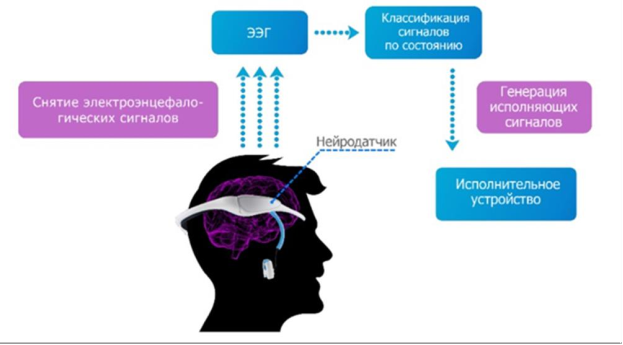
Основным элементом аппарата по «считыванию мыслей» служит гарнитура с электродами. Технология позволяет регистрировать электрическую активность мозга и преобразовывать её в команды для внешних исполнительных систем. Мозг спрятан глубоко в черепе, но электрические поля, создаваемые нервными клетками, пробиваются через кости, мышцы, кожу и улавливаются электродами на кожной поверхности головы. Это метод электроэнцефалографии.
Приложение 2: презентационная модель дрона, управляемого посредством нейроинтерфейса



Приложение 3. Фотографии из лаборатории

Значительное время требуется для настройки базовых параметров — чувствительности и точности нейроинтерфейса.


После проведения необходимых калибровок и настроек нейроинтерфейс готов к управлению полетом модели вертолета

Приложение 4
Статистические показатели участников проекта
1. Громов Андрей:
|
Общее количество испытаний суворовца Громова А. |
Результат достигнут за счет медитации |
Результат достигнут за счет концентрации |
Результат не достигнут |
|
100 |
3 |
90 |
7 |
![]()
![]()
![]() 2. Хотин Дмитрий:
2. Хотин Дмитрий:
|
Общее количество испытаний суворовца Хотина Д. |
Результат достигнут за счет медитации |
Результат достигнут за счет концентрации |
Результат не достигнут |
|
100 |
70 |
5 |
25 |
3. Симонов Даниил.
|
Общее количество испытаний суворовца Симонова Д. |
Результат достигнут за счет концентрации при наработке образа движения дрона |
Результат достигнут за счет концентрации и наработки образа играющего музыканта |
Результат не достигнут |
|
100 |
48 |
45 |
7 |
Приложение 5. Снаряжение военнослужащего спецподразделения
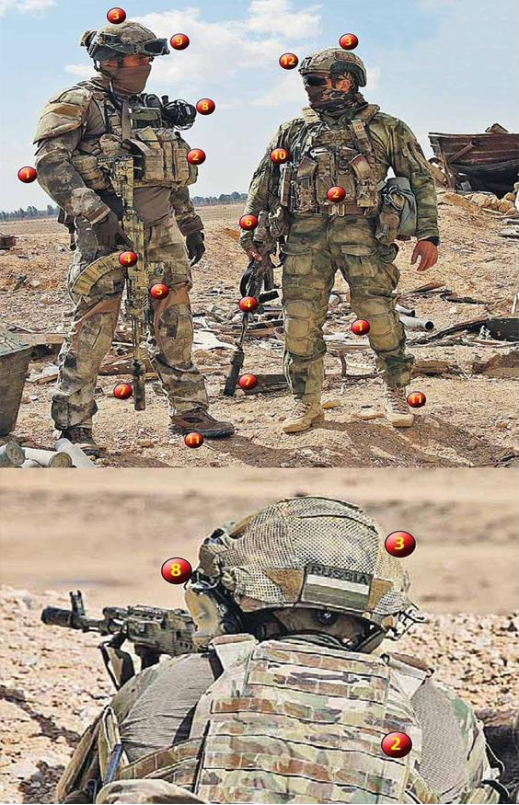
1. Камуфляж из современной ткани повышенной прочности с встроенными налокотниками и наколенниками.
2. Бронежилет 6-го класса защиты (способен остановить пулю, выпущенную из автомата и даже снайперской винтовки) с креплениями под магазины с патронами, гранаты, аптечку.
3. Шлем из сверхпрочного материала.
4. Автомат Калашникова последней модели с планками Пикатинни, на которые можно крепить фонарики, лазерные целеуказатели и иное дополнительное оборудование.
5. Коллиматорный прицел (наводит точку на цель).
6. Оптический прицел (визуально приближает цель). Вооружение военнослужащих спецназа в Сирии.
7. Приборы бесшумной стрельбы.
8. Активные наушники, которые защищают от звуков боя и позволяют переговариваться с бойцами подразделения через встроенную радиостанцию.
9. Противоосколочные очки.
10. Пистолет.
11. Легкие и прочные тактические ботинки.
12. Крепление для прибора ночного видения.
Предлагаем дополнить его специальными устройствами:
13. Приемник и передатчик (например, будет использоваться 433 mhz LoRa дальность действия до 4х километров).
14. Нейроинтерфейс (например, MindWave отлично подходит для разного рода проектов любой сложности и обладает SDK), который монтируется непосредственно в шлем бойца.

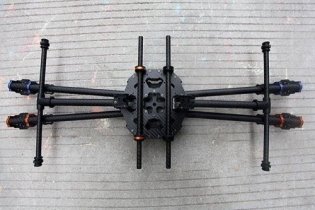
Приложение 6
Комплектующие беспилотного летательного аппарата, собранного нами в лаборатории
Полетный контроллер (является мозгом мультикоптера, который обрабатывает все входящие в него сигналы и передает команды по корректировке оборотов моторов): будет использован Pixhawk от компании 3Drobotics обладает мощным процессором STM32F405 (Cortex M4F), 168МГц и может отлично работать с микрокомпьютером Raspberry pi, так же имеет на борту акселерометр, барометр, гироскоп и может работать с различными интерфейсами такими как UART, CAN, I2C, SPI.

Рама (несущая конструкция, на которой располагаются все элементы мультикоптера): складная 650 миллиметровая рама от «Tarot» IRONMAN 650, обладает достаточной вместительностью что бы вместить в себя все компоненты. Рама отлично подходит для долголетных квадрокоптеров.
Регуляторы оборотов (управляют оборотами бесколлекторных двигателей и являются промежуточным звеном в связке ПК-двигатель): т. к. будем использовать батарею 6s и моторы с максимальным током 30 Ампер, то регулятор оборотов возьмем T-Motor F30A

Бесколлекторный двигатель
Вес коптера будет не бльшой, но для лучшего КПД возьмем моторы из расчета максимального диаметра воздушного винта, максимаьлной тягой, низкооборотистые «Tarot 4008» 330 оборотов на вольт.

Воздушный винт
Будут использоваться карбоновые 1555 MARKII Matte Carbon Fiber Propeller

Аккумулятор (обычно используются литий-полимерные сборки, но в редких случаях используются литий-ионные с высокой токоотдачей): нам не требуется большая токоотдача и быстрые полеты, так что подойдет Multistar

High Capacity 8000mAh 6S с тоотдачей в 12c
GPS/ГЛОНАСС (модуль, отвечающий за позиционирование и ориентацию мультикоптера в пространстве);
Приемник и передатчик сигнала управления:
будет использоваться 433 mhz LoRa дальность действия до 4х километров.

FPV система (представляет собой связку видеокамеры, видео передатчика, монитора, видео приемника. В некоторых случаях для получения параметров телеметрии используется модуль OSD, который накладывает на получаемое изображения данные с датчиков мультикоптера);
Нейроинтерфейс (связь мозг-компьютер):
MindWave отлично подходит для разного рода проектов любой сложности и обладает SDK.

Микрокомпьютер:
В роли коммутирующего устройства будет использовано Arduino UNO или Raspberry Pi3

Литература:
1. Курс лекций д. б.н. Александра Яковлевича Каплана: https://youtu.be/GINJ- xks5r8
2. Дроны с нуля: Пер. с англ. / Т. Килби, Б. Килби. — СПб.: БХВ-Петербург, 2016. — 192 с.:
3. Яценков В. С. Твой первый квадрокоптер: теория и практика. — СПб.: БХВ- Петербург, 2016. — 256 с.: ил. — (Электроника)
4. Как беспилотники изменят промышленность Вячеслав Голованов Редактор GeekTimes 1 декабря 2016. Источник: https://geektimes.ru/post/283262/
5. https://vc.ru/future/18995-neurointerfaces
6. https://ru.wikipedia.org/wiki/ %D0 %9D %D0 %B5 %D0 %B9 %D1 %80 %D0 %BE %D 0 %BA %D0 %BE %D0 %BC %D0 %BF %D1 %8C %D1 %8E %D1 %82 %D0 %B5 %D1 %80 %D0 %BD %D1 %8B %D0 %B9_ %D0 %B8 %D0 %BD %D1 %82 %D0 %B5 %D1 %80 %D1 %84 %D0 %B5 %D0 %B9 %D1 %81
7. https://futurist.ru/articles/1423
8. https://habr.com/company/neuronspace/blog/262357/
9. http://neuromatix.pro/2015/04/30/potreb-neuro/
10. https://www.youtube.com/watch?v=Bl0WaZ9asgs нейноинтерфейс своими руками.
11. https://intellect.ml/nejrokompyuternyj-interfejs-nejrointerfejs-7739
12. https://nplus1.ru/news/2018/11/22/ibci
13. https://techfusion.ru/kak-eto-ustroeno-nejrointerfejs-dlya-meditatsii/
14. http://expertorama.com/nejrointerfejs-tendencii-i-perspektivy-razvitiya/

