




Ориентация робота в условиях коридорной местности
Автор: Смольский Дмитрий Александрович
Рубрика: Электроника, радиотехника и связь
Опубликовано в Техника. Технологии. Инженерия №3 (9) июнь 2018 г.
Дата публикации: 13.05.2018
Статья просмотрена: 1014 раз
Библиографическое описание:
Смольский, Д. А. Ориентация робота в условиях коридорной местности / Д. А. Смольский. — Текст : непосредственный // Техника. Технологии. Инженерия. — 2018. — № 3 (9). — С. 8-14. — URL: https://moluch.ru/th/8/archive/95/3378/ (дата обращения: 19.04.2024).
В докладе изложены этапы создания робота, рассказан алгоритм его движения по извилистому участку поверхности. Определены достоинства и недостатки использования ультразвуковых датчиков в системе ориентации робота. Определены пути дальнейшей модернизации данного робота, в том числе при его реализации в качестве автономного или телеуправляемого подводного аппарата.
В университете перед нами была поставлена задача движения робота по коридору. Необходимость решения этой задачи заключалась в дальнейших разработках уже на более серьезном уровне с решением целого комплекса гидроакустических задач, но сегодня я бы хотел поделиться опытом создания опытного образца наземного робота и его ориентирования в пространстве.
Перед нашим аппаратом стояла задача преодолеть следующий путь (рисунок 1):
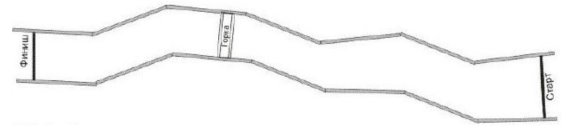
Рис. 1.
Все начиналось с того, что нам был выдан набор, содержащий в себе: пару неповоротных колес, к ним — пара электромоторов, один ультразвуковой датчик URM37, блок питания, набор проводов, корпус на который все это крепилось и сама плата (Arduino Romeo 2.2). Выглядело в сборке это вот так (рисунок 2):

Рис. 2.
Поскольку одной из приоритетных задач являлась скорость преодоления трассы — от такой конструкции решено было отказаться, так как алгоритм поворота посредством вращения колес в разные стороны отнимал бы некоторое количество времени, пока бы наш робот подворачивал себя — уходили бы драгоценные секунды на эти виляния, да и крутящий момент моторов этого аппарата оставлял желать большего. Скорость текущего аппарата составляла примерно 2,4 км/ч. В качестве альтернативы, мною было предложено использовать базу от старой машинки на пульте управления уже с 4 колесами, задним приводом и передней поворотной кулисой, с возможностью установки большего числа модулей в силу более грузоподъемного и большого корпуса (габариты аппарата 29*20*13) и обилия точек опоры (колес).
В дальнейшем эта идея была реализована, старая плата из машинки была извлечена, на ее место встала наша Arduino Romeo 2.2, к ней был припаян блок питания на 4 аккумуляторные батареи, который крепился под днище машины посредствам эластичного ремня и изоленты. Поскольку о начальных технических характеристиках нам было не так много известно, для первых тестов на плату был записан самый простой алгоритм движения вперед, чтобы опытным путем установить реальные перспективы скорости движения нашего аппарата. Результатами этих запусков мы остались довольны, так как средняя скорость автомобиля составила уже 7,2 км/час (рисунок 3)

Рис. 3.
Далее необходимо было решить вопрос о количестве дальномеров и их расположения. На основании их технических характеристик и спецификации (URM37) было проанализировано, как устройство будет просматривать местность при различных вариантах расположения датчиков (рисунок 4):
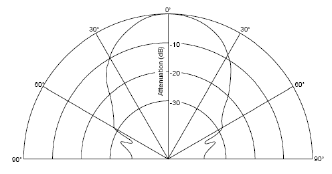
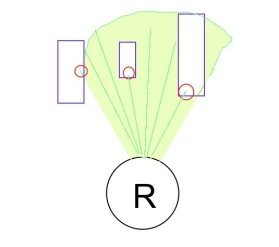
Рис. 4.
Во-первых, решено, что для нашей не столь сложной первоначально задачи хватит двух датчиков (по количеству поворотных колес), а вот дальше возникла одна из первых неприятных особенностей. Дело в том, что угол охвата датчиков невелик (всего 30 градусов), в связи с чем при параллельной установке их на корпус у аппарата возникают так называемые «мертвые зоны». Когда он движется параллельно, например, стене, есть вероятность, что он будет об нее тереться, теряя скорость, а при худшем раскладе и вовсе упрется и может изменить направление движения на противоположное. Эту проблему можно решить путем установки еще пары датчиков по бокам, но это уже усложнит как конструкцию, так и алгоритм. Поэтому было придумано установить датчики под углом (примерно на градус поворота передних колес, что составило примерно 35 градусов), это дало нам какой-никакой боковой охват местности и возможность написания относительно легкого алгоритма движения, так как по большей части многие проблемы, с которыми мы бы могли столкнуться были решены конструктивно (рисунки 5, 6)

Рис. 5.
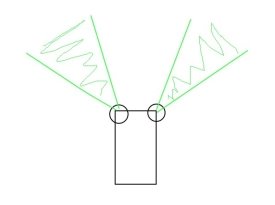
Рис. 6.
Но этого было недостаточно для решения нашей задачи. Нужен был новый алгоритм…
Первоначальной идеей был просто поворот по типу: “Вижу препятствие справа — подворачиваю налево и наоборот” Этот алгоритм оказался малоэффективен на высоких скоростях. Наш аппарат достигал препятствия быстрее, чем успевал подвернуть колеса. Поэтому был придуман новый алгоритм:
старый все еще продолжал работать + при приближении к препятствию максимально плотно и примерно нулевым показаниям датчика — робот совершал рывок длиной 2 секунды назад, с подворотом колес в сторону препятствия, а затем еще один рывок назад для того, чтобы случайно вновь не влететь (так как высокая скорость), после чего аппарат поворачивал в сторону более дальнего пеленга и продолжал движение вперед (рисунок 7):
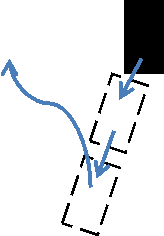
Рис. 7.
Скорость решено было оставлять максимальной на каждом этапе, чтобы не потерять ход.
Итог: нашему роботу удалось выполнить поставленную перед ним задачу за 31,18 секунд, что стало лучшим результатом и позволило выиграть соревнования (рисунки 8,9)

Рис. 8.
Рис. 9.
В ходе эксплуатации датчиков и реализации движения аппарата по коридорной местности эмпирическим путем была проанализирована работа ультразвуковых датчиков в целом, а также намечены дальнейшие пути развития аппарата (рисунок 10)

Рис. 10.
Достоинства ультразвуковых датчиков:
- Высокая дальность приема до 5 метров, что при малых габаритах аппарата позволяет достигнуть весьма неплохих показателей скорости, так как наш робот может заранее начать поворот.
- Ультразвуковой датчик является акустическим прибором, а, как известно, под водой один из основных способов локации именно акустика.
- Компактность, что позволяет нам выбрать всевозможные способы посадки, что, в свою очередь, влечет разнообразие способов локации.
- Относительно небольшой вес, что незначительно сказывается на ходовой части аппарата.
- Доступность, они недорогие и их не так сложно достать.
Недостатки:
- Низкий спектр обзора, всего 15 градусов в одну сторону, то есть общий охват 30 градусов одним датчиком.
Эту проблему можно решить путем увеличения количества самих датчиков.
Однако, этот же недостаток в какой-то степени является и достоинством, так как мы получаем довольно узкую характеристику направленности, что дает нам довольно точный пеленг до объекта.
- Наличие «мертвой зоны» вблизи датчиков, примерно 4 см, что вытекает как раз из-за узкой характеристики направленности, а это может повлечь за собой то, что мы просто не увидим перед собой какого-то препятствия, если это будет не сплошная стена.
Решается проблема путем сужения расстояния между приемниками, но тем самым теряется ширина обзора, то есть мы видим вблизи хорошо, но узко.
- Так как характеристика направленности наших датчиков круговая, то наличие множества мелких объектов выводится как одно большое препятствие, что полностью исключает возможность правильной ориентации в условиях мелкой растительности, в грунте и прочих местах с большим количеством мелких объектов.
- Герметичность, отправлять робота под воду с датчиками без гидроизоляции чревато их потерей. Для решения этой проблемы используются звукопроницающая обработка специальными гидроизолирующими материалами, незначительно влияющими на звукопроводимость.
В дальнейшем помимо дальномеров, если мы хотим решать более серьезные задачи, такие как навигация, необходимо устанавливать большее количество блоков, необходимых для решения подобных задач. Например, для более точной навигации в пространстве, есть смысл в установке гироскопа, магнитометра и акселерометра (рисунок 11)

Рис. 11.
Представьте, мы один раз определяем его положением в пространстве (курс, крен и дифферент) по средствам магнитометра, а затем на основе изменений параметров гироскопа (угловых скоростей), мы можем определять ориентацию нашего аппарата относительно первого измерения. А акселерометр, в свою очередь, позволяет нам определять положение. Самым же разумным решением видится внедрение блока GPS, который определял бы начальное положение робота в пространстве, затем на основе показаний акселерометра находить изменения относительно начального положения.
Для того, чтобы робот мог решать какие-то более глобальные навигационные задачи, конечно, хорошо бы было иметь помимо робота более мощную вычислительную машину с обратным каналом связи на робота. Создать некую информационно-управляющую систему с распределением обязанности в зависимости от вычислительных мощностей. Так, например, сам робот будет отвечать за съем данных с датчиков и передачу данных на более мощную вычислительную машину, которая на основе полученных данных будет решать задачи навигации и на основе результатов формировать команды управления, которые робот в свою очередь должен будет выполнить. (рисунок 12)
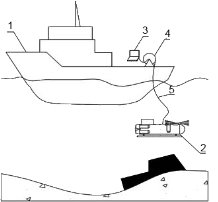
Рис. 12. 1–Обслуживающее судно; 2–ТНПА; 3–Пульт управления, устройство вывода информации, устройство записи; 4–Катушка с кабелем; 5–Кабель-трос.
Благодаря распределению обязанностей система может эффективно решать задачи навигации без проблемы перегрузок.
Конечно, одной из главных проблем, которые возникают в данном алгоритме, является проблема передачи… Наиболее эффективным решением является использование проводной передачи.
Помимо проведения всех вышеуказанных мероприятий для того, чтобы наш робот мог выполнять поставленные задачи под водой, необходимо будет учесть новые реалии и условия, в которые попадет наш аппарат, такие как:
– количество степеней свободы движения,
– плотность и состав окружающей среды,
– модель движения робота (расположение движителей, их количество, габариты, направление),
– флору и фауну среды,
и т. д.
Литература:
- URM37 V3.2 Ultrasonic Sensor Specification;
- Arduino Romeo 2.2 Specification;
- Белов Б. П. Проектирование информационно-управляющих систем подводной робототехники. — Санкт-Петербург, СПбГМТУ, 2008
- Кузнецов М. И. Основы электротехники — Москва: Высшая школа, 1970
- Официальный сайт Arduino (https://www.arduino.cc/index.php);
- Регламент робототехнических соревнований по дисциплине «Ралли»;
- Чемоданов М. Н. Технология АМУ.
Похожие статьи
Использование ультразвуковых волн для измерения расстояния...
Затем в контуре происходят мощные колебания, характеризующиеся большой
Диаграмма направленности ультразвукового датчика — это
Точность измерения ультразвуковых датчиков напрямую зависит от температуры и давления окружающей среды (рисунок 7).
Робототехника: конструирование и программирование
Решение учащимися ряда кибернетических задач, результатом каждой из которых будет работающий механизм или робот с автономным управлением.
Скорость опроса датчиков. Краткая характеристика среднего и большого сервомотора.
Трехмерный тактильный датчик для манипуляционных...
Поезжаева, Е. В. Теория механизмов и механика машин. Промышленные роботы: учеб. пособие: в 3 ч. / Е. В. Поезжаева.
Имитационная модель цифрового датчика давления. Первая задача – повышение метрологических характеристик датчика – решается алгоритмами...
Калибровка роботов | Статья в журнале «Молодой ученый»
Ключевые слова: калибровка, система управления, датчики.
Стенд по исследованию алгоритмов работы вычислителя БИНС... персональная вычислительная машина; программное обеспечение.
Обзор и перспективы развития мобильных шагающих...
Он оборудован двумя датчиками — “усами”.
Задачами системы управления становится управление большим числом степеней свободы, обеспечение требуемых
Программное обеспечение систем управления определяет свойства и характеристики шагающих роботов.
Разработка алгоритма дистанционного управления...
Управление роботом осуществлялось при помощи пульта оператора (джойстика).
Приложение 1. Технические характеристики манипулятора DENSO VS-6577G-B [1].
Для этого была использована линейка датчиков, составленная из пяти плат-датчиков промышленного...
Автоматизированная система управления... | Постановка задачи
Постановка задачи. Разработать и реализовать автоматизированную систему управления роботом-манипулятором PM-01 на
Сигналы от датчиков индицируют положение звеньев.
Схема электрическая принципиальная устройства сопряжения представлена на рисунке 1.
Автономная система ориентирования беспилотного летательного...
Особенностью аппаратов с дистанционным управлением (1 класса) является участие в процессе управления
На рис.1 показана принципиальная схема передачи изображения от датчика до устройства
Пороговые значения ошибок приведены на графиках рисунка 6.
Создание робота-гонщика на платформе Arduino
Они предназначены для управления электронными устройствами и представляют собой однокристальный компьютер, способный выполнять простые задачи.
Далее необходимо разработать алгоритм движения робота на основании показаний датчиков.
Похожие статьи
Использование ультразвуковых волн для измерения расстояния...
Затем в контуре происходят мощные колебания, характеризующиеся большой
Диаграмма направленности ультразвукового датчика — это
Точность измерения ультразвуковых датчиков напрямую зависит от температуры и давления окружающей среды (рисунок 7).
Робототехника: конструирование и программирование
Решение учащимися ряда кибернетических задач, результатом каждой из которых будет работающий механизм или робот с автономным управлением.
Скорость опроса датчиков. Краткая характеристика среднего и большого сервомотора.
Трехмерный тактильный датчик для манипуляционных...
Поезжаева, Е. В. Теория механизмов и механика машин. Промышленные роботы: учеб. пособие: в 3 ч. / Е. В. Поезжаева.
Имитационная модель цифрового датчика давления. Первая задача – повышение метрологических характеристик датчика – решается алгоритмами...
Калибровка роботов | Статья в журнале «Молодой ученый»
Ключевые слова: калибровка, система управления, датчики.
Стенд по исследованию алгоритмов работы вычислителя БИНС... персональная вычислительная машина; программное обеспечение.
Обзор и перспективы развития мобильных шагающих...
Он оборудован двумя датчиками — “усами”.
Задачами системы управления становится управление большим числом степеней свободы, обеспечение требуемых
Программное обеспечение систем управления определяет свойства и характеристики шагающих роботов.
Разработка алгоритма дистанционного управления...
Управление роботом осуществлялось при помощи пульта оператора (джойстика).
Приложение 1. Технические характеристики манипулятора DENSO VS-6577G-B [1].
Для этого была использована линейка датчиков, составленная из пяти плат-датчиков промышленного...
Автоматизированная система управления... | Постановка задачи
Постановка задачи. Разработать и реализовать автоматизированную систему управления роботом-манипулятором PM-01 на
Сигналы от датчиков индицируют положение звеньев.
Схема электрическая принципиальная устройства сопряжения представлена на рисунке 1.
Автономная система ориентирования беспилотного летательного...
Особенностью аппаратов с дистанционным управлением (1 класса) является участие в процессе управления
На рис.1 показана принципиальная схема передачи изображения от датчика до устройства
Пороговые значения ошибок приведены на графиках рисунка 6.
Создание робота-гонщика на платформе Arduino
Они предназначены для управления электронными устройствами и представляют собой однокристальный компьютер, способный выполнять простые задачи.
Далее необходимо разработать алгоритм движения робота на основании показаний датчиков.
