




Разработка автоматизированной системы обнаружения и идентификации транспортных средств для измерения плотности транспортного потока
Авторы: Демиденков Константин Андреевич, Мельников Игорь Игоревич
Рубрика: 1. Информатика и кибернетика
Опубликовано в
международная научная конференция «Технические науки: теория и практика» (Чита, апрель 2012)
Статья просмотрена: 1133 раза
Библиографическое описание:
Демиденков, К. А. Разработка автоматизированной системы обнаружения и идентификации транспортных средств для измерения плотности транспортного потока / К. А. Демиденков, И. И. Мельников. — Текст : непосредственный // Технические науки: теория и практика : материалы I Междунар. науч. конф. (г. Чита, апрель 2012 г.). — Чита : Издательство Молодой ученый, 2012. — С. 11-16. — URL: https://moluch.ru/conf/tech/archive/7/2200/ (дата обращения: 16.04.2024).
В последнее десятилетие автомобильный парк Беларуси значительно вырос и продолжает увеличиваться. По данным Министерства транспорта и коммуникаций Республики Беларусь по состоянию на 01.01.2010 он насчитывал 3433 тыс. автотранспортных средств, из которых 83,6% приходилось на автомобили [8, c. 104]. За период с 2005 по 2009 гг. число автотранспортных средств возросло на 21 %, а уровень автомобилизации населения Беларуси повысился с 280 до 340 автотранспортных средств на 1 тыс. населения. Все это привело к увеличению плотности транспортного потока. Однако пропускная способность дорог остается прежней, что приводит к образованию заторов и пробок. Такая ситуация также характерна и для других стран, в частности, Республики Украины и Российской Федерации [3, с. 505]. Улучшить ситуацию может автоматизированное регулирование дорожным движением.
Для этих целей во многих странах разработаны автоматизированные системы управления дорожным движением (АСУДД) [3, с. 505-506]. Так, в Республике Беларусь разработана и внедрена в эксплуатацию автоматизированная система управления дорожным движением «Агат» [1], аналог автоматизированных систем управления дорожным движением, разработанных в Российской Федерации, и интеллектуальных транспортных систем, разработанных в США и ЕС. Все эти системы нуждаются в сборе и оперативной обработке исходных данных, в частности данных о плотности транспортного потока и его скорости.
Сбор информации, как правило, осуществляется посредствам датчиков различного типа: контактные, фотоэлектрические, ультразвуковые и магнитные [4, с. 111-113]. Они относительно дешевы, просты в установке и эксплуатации, но имеют очень ограниченный угол обзора и ряд других недостатков (низкая износостойкость, большое влияние атмосферных загрязнений и погоды, акустические помехи и др.) [4, с. 111-113]. Особое место занимают видеокамеры, или оптические датчики, которые, как правило, используются для обнаружения внештатных ситуаций на дороге. С их помощью осуществляется видеоконтроль дорожного движения, но есть и другие способы их применения, о которых будет сказано ниже.
Видеокамеры могут применяться совместно с детекторами другого типа для одновременного измерения скорости движения автомобиля и его идентификации (распознавания номера, определение класса, цвета и т.п.), как это сделано в системе «VOCORD Traffic» [7]. В ней посредствам видеокамер, установленных над участком автомагистрали, и специального программного обеспечения производится фотофиксация транспортного средства и распознавание его номерного знака, а с помощью радаров – определение его скорости.
Другая полезная возможность, которая заложена в системе видеонаблюдения за транспортным потоком – анализ его статистики (вычисление плотности и средней скорости потока и др.). Такая возможность активно используется в системе видеоконтроля «КОМКОН Traffic Control Equipment» [5]. В ней для организации видеоконтроля применяется несколько типов камер, которые могут быть установлены в соответствии с одним из нескольких возможных вариантов (см. рис. 1).
Первый тип – панорамные камеры низкого разрешения для мониторинга транспортного потока и определения нарушений. Обычно применяется одна камера на одно направление движения.
Второй тип камер – камеры высокого разрешения – применяются для фиксации номерных знаков транспортных средств. Обычно используется одна камера на две-три полосы движения.
Третий тип − роботизированная камера с возможностью масштабирования. Применяется для общего наблюдения за перекрестком. Количество таких камер определяется сложностью дорожных ситуаций, возникающих на перекрестке.
|
|
|
|
а |
б |
|
|
|
|
в |
г |
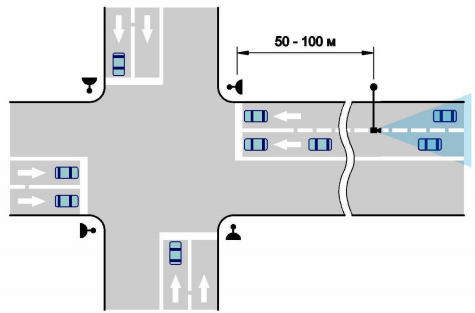
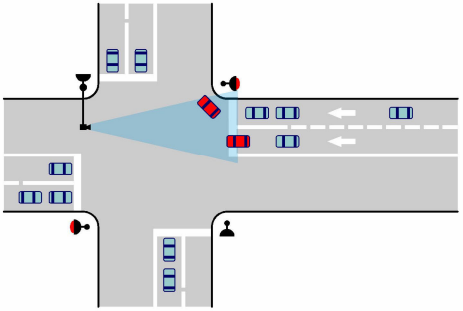

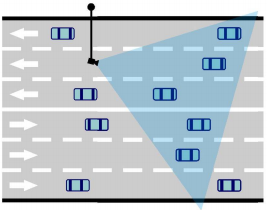
Рисунок 1 – Варианты установки камер на перекрестке и перегоне: а) установка камеры на подъезде к перекрестку; б) установка камеры на перекрестке; в) установка камеры на перегоне с захватом одного направления движения; г) установка камеры на перегоне с захватом двух направлений движения
Видеокамеры позволяют получать визуальную информацию о дорожной обстановке сразу с нескольких полос благодаря широкому углу обзора. Но обработка видеоизображения, причем не всегда высокого качества, с последующим распознаванием движущихся объектов на нем является ресурсоемкой задачей, требующей нередко специализированного и дорого оборудования.
На данный момент в городе Могилеве не внедрена никакая автоматизированная система управления дорожным движением, однако на некоторых перекрестках необходимость автоматизированного управления режимами работы светофоров стоит достаточно остро. Возникла потребность в создании относительно недорогой и простой в освоении автоматизированной системы обнаружения и идентификации транспортных средств с целью слежения за транспортными средствами и сбора информации о плотности транспортного потока и скорости ее изменения. Это позволило бы оперативно менять режимы работы светофоров на перекрестках в зависимости от интенсивности движения транспортных средств, предупреждая образование заторов.
Данная система должна не требовать дорогого специализированного оборудования, видеоконтроль должен осуществляться посредствам камер панорамного типа с низким разрешением. При этом быстродействие такой системы должно быть на уровне быстродействия аналогичных модулей в рамках существующих автоматизированных систем управления дорожным движением или систем видеоконтроля, уже применяемых в Республике Беларусь (например, АСУДД «АГАТ»), а также в Российской Федерации (например, «VOCORD Traffic») и в Республике Украина (например, «КОМКОН Traffic Control Equipment»).
Для того чтобы использовать более дешевые универсальные, а не специализированные и, как правило, более дорогие аппаратные средства, осуществляя с их помощью ресурсоемкую обработку видеоизображения за достаточно короткий промежуток времени, авторы решили разработать такую систему с применением параллельных вычислений. Для решения данной задачи можно использовать параллельные системы с архитектурой SIMD и MIMD по классификации Флинна [2, с. 97-99Воеводин, В.В. Параллельные вычисления / В.В. Воеводин, Вл.В. Воеводин. – СПб.: БХВ-Петербург, 2002. – 608 с.: ил.], а также многопоточные графические процессоры с архитектурой CUDA [9]. Сегодня бурный прогресс в области многоядерных и многопроцессорных систем позволяет распараллеливать сложные алгоритмы цифровой обработки видеоизображения. Например, разбивать изображение на области и параллельно обрабатывать каждую из них, что ускоряет процесс обработки всего изображения в целом. Таким образом, можно быстро и дешево организовывать высокопроизводительные вычислительные мощности.
Ускорить процесс распознавания можно путем, например, распределения задачи на множестве нейронных сетей [10, с. 85-87]. Распределением данных между процессами занимается особый выделенный процесс, который условно можно назвать главным процессом. После распределения данных каждый процесс выполняет работу над своим блоком данных и затем отсылает результат главному процессу, который обобщает все принятые данные и выносит решение о результате распознавания. В качестве результата распознавания главный процесс должен выбрать результат той нейронной сети, которая наиболее уверена в своем ответе.
Анализ систем обработки видеоизображения и распознавания объектов на нем, показал, что процесс обработки и анализа видеоизображения идентичен для всех подобных систем [6, с. 7-20]. Он состоит из четырех этапов: выделение переднего плана, выделение и классификация движущихся объектов, отслеживание траектории движения найденных объектов, или трекинг, распознавание и описание движения найденных объектов.
На данный момент авторы реализуют несколько возможных вариантов работы системы. На рисунке 2 показана общая схема работы системы, при которой процесс цифровой обработки видеоизображения и распознавания объектов распараллелен изначально (за основу взят кадр из презентации системы «VOCORD Traffic», как наиболее схожей по своим характеристикам с разрабатываемой системой). Кадр, приходящий с видеокамеры, разбивается главным процессом, например, на три фрагмента (по количеству полос). Данные этих фрагментов передаются трем рабочим процессам, которые параллельно осуществляют обработку видеоизображения и оперируют нейронными сетями одной и той же топологии с целью распознавания транспортных средств, появившихся в кадре.
Такая схема работы позволяет ускорить процесс распознавания транспортных средств в рамках всего кадра, но существует проблема двойного распознавания транспортного средства при его перестроении с одной полосы на другую в зоне видеонаблюдения, которая может быть решена путем использования трекинга.
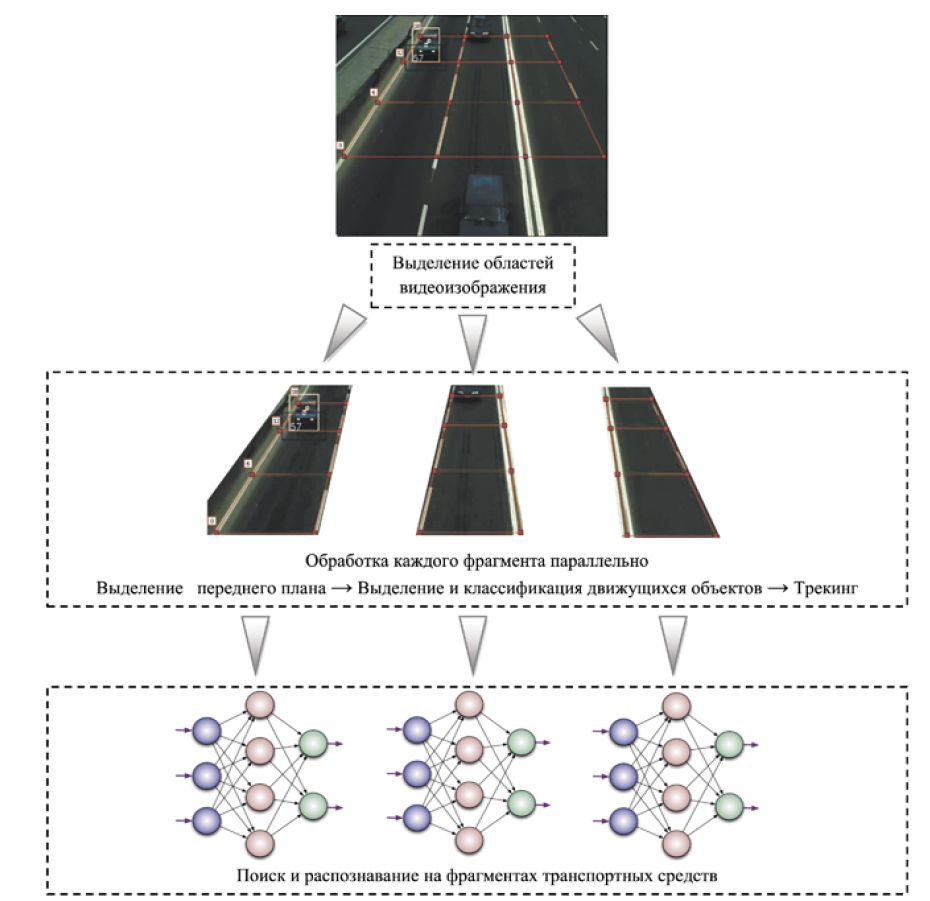
Рисунок 2 – Первый вариант общей схемы работы системы
На рисунке 3 показан другой вариант общей схемы работы системы, при которой процесс цифровой обработки видеоизображения осуществляется главным процессом, а вот поиск и распознавание объектов производится параллельно разными рабочими процессами, оперирующими разными по топологии нейронными сетями.
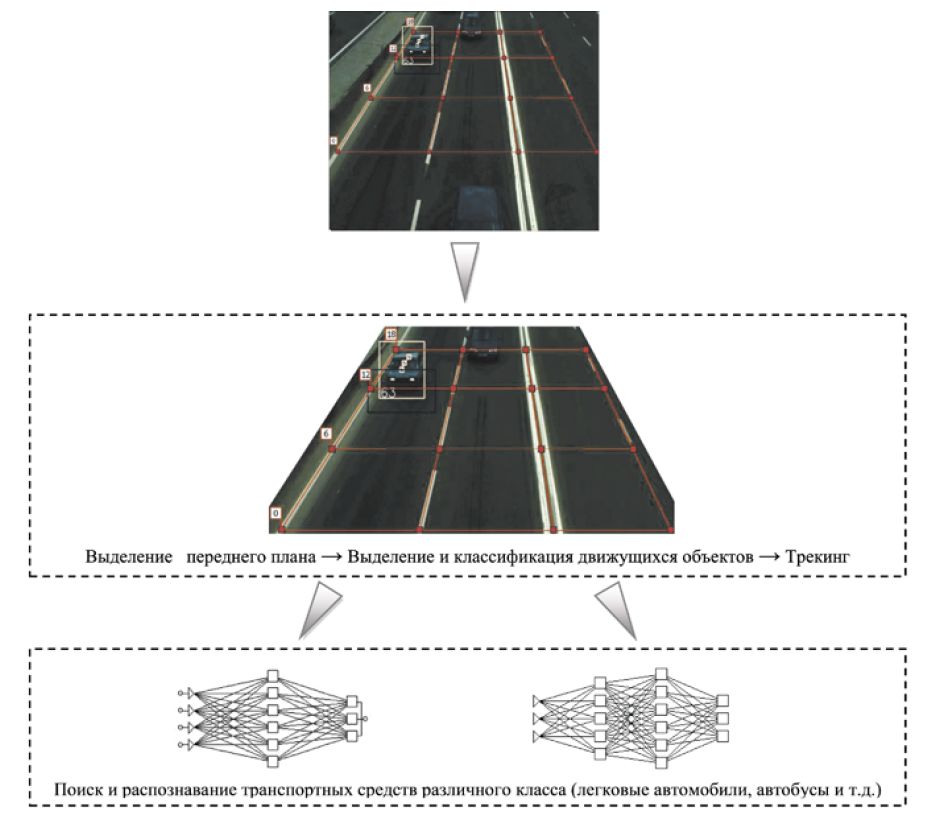
Рисунок 3 – Второй вариант общей схемы работы системы
Каждый рабочий процесс определяет, относится ли выделенный объект к его области компетенции, и если относится, то производит распознавание. В таком случае одна нейронная сеть может быть обучена с высокой точностью распознавать один класс автомобилей (например, легковые), другая – другой класс (например, грузовики определенного типа), третья – третий класс (например, автобусы) и т.д.
Разрабатывается и еще одна схема работы системы, суть которой в следующем. Как известно, построение (выделение) переднего плана является наиболее важным этапом обработки, поскольку именно он определяет дальнейшее качество системы в целом и позволяет значительно сократить объем вычислений путем обработки только тех пикселей, которые относятся к переднему плану. Существует несколько методов построения переднего плана: метод вычитания фона, вероятностные методы, методы временной разности и т.д. Каждый из них обладает своими преимуществами и недостатками. Учитывая постоянно изменяющееся состояние фона при видеонаблюдении за дорогой из-за освещенности и атмосферных явлений, существует необходимость в быстрой адаптации системы к этим изменениям. Это можно достичь путем использования различных методов обработки видеоизображения в рамках одной и той же системы в зависимости от сложившейся ситуации. В этом случае благодаря параллельным вычислениям можно осуществить обработку одного и того же кадра или фрагмента кадра разными процессами одновременно (см. рис. 4).
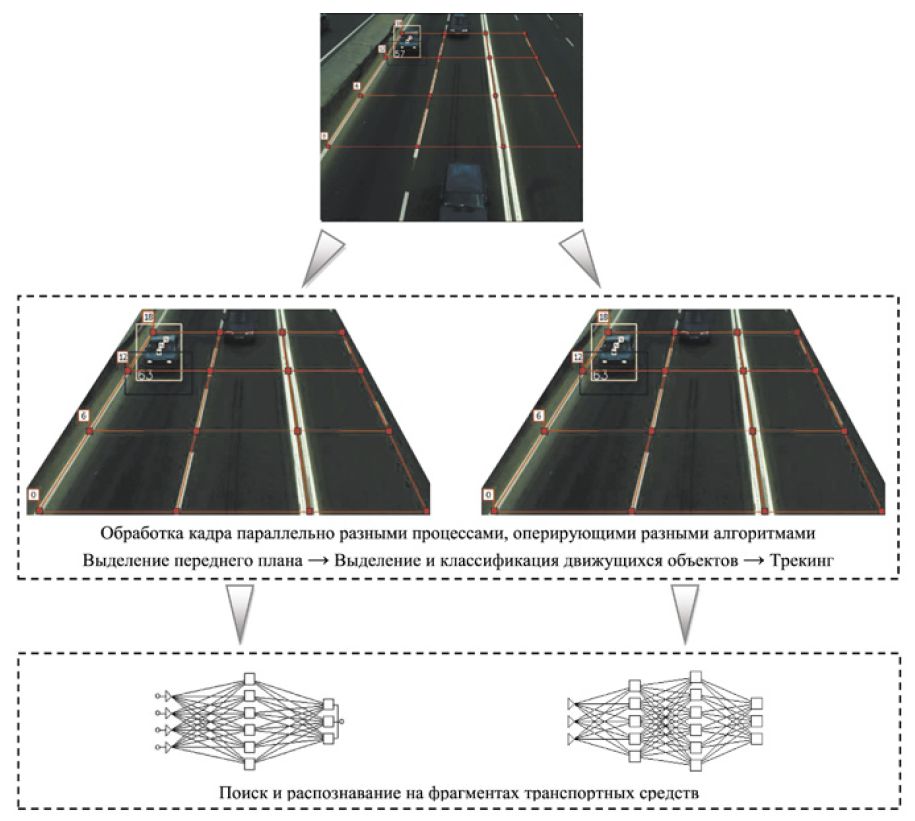
Рисунок 4 – Третий вариант общей схемы работы системы
Эти процессы будут оперировать разными алгоритмами цифровой обработки видеоизображения и нейронными сетями различной топологии. Тот процесс, который дал результат приемлемой точности быстрее всех, «выигрывает», остальные отсанавливаются. Авторы полагают, что в таком случае можно ускорить процесс адаптации системы к изменяющимся факторам внешней среды. Каждый процесс оперирует комплексом алгоритмов, которые могут давать точный результат при одних условиях внешней среды, а в других быть бесполезными. Например, метод оптического потока позволяет с высокой точностью отделить фон от переднего плана, но он чувствителен к шумам, т.е. данный алгоритм хорошо покажет себя при хорошей видимости, в то время как в худших условиях целесообразнее будет применить иной метод или группу методов (например, метод временной разности совместно с методом вычитания фона).
На данный момент авторы реализуют именно эти три возможные схемы работы системы в поисках наиболее оптимальной из них по скорости распознавания и скорости адаптации к изменяющимся факторам внешней среды (туман, ночь, смог, яркий день с хорошей видимостью и т.п.). Не исключено, что исследования приведут к выработке новых схем.
Разрабатываемая система может быть использована как независимо, так и как модуль в рамках уже существующих систем управления дорожным движением, сохраняя или даже увеличивая при этом показатели быстродействия процесса обнаружения и идентификации транспортных средств. Авторы считают также возможным использование системы и в других областях: дефектоскопия, определение объектов, находящихся перед движущимся транспортным средством и др.
Литература:
Автоматизированная система управления дорожным движением «Агат» (АСУДД «Агат») [Электронный ресурс] / АГАТ – системы управления. Режим доступа http://www.agat.by/products/transport/dd/asudd-agat/ (дата доступа 25.03.2012 г.).
Воеводин, В.В. Параллельные вычисления / В.В. Воеводин, Вл.В. Воеводин. – СПб.: БХВ-Петербург, 2002. – 608 с.: ил.
Зуев А.Л. Программный комплекс моделирования и оптимизации транспортных потоков / А.Л. Зуев, В.Н. Неспирный // Донбас-2020: перспективи розвитку очима молодих вчених: Матеріали V науково-практичної конференції ДонТУ. – Донецк, 2010 г. – С. 505-509.
Кожевников В.И. Автоматизированная система управления дорожным движением / В.И. Кожевников [и др.] // Вестник Самарского государственного университета. – Самара, 1995. – №. 1(6). – С. 110-118.
КОМКОН Traffic Control Equipment [Электронный ресурс] / КОМКОН НПП «Система + Сервис». Режим доступа http://komkon.ua/programs/tce.html (дата доступа 26.03.2012 г.).
Лукьяница А.А. Цифровая обработка видеоизображений / А.А. Лукьяница, А.Г. Шишкин. – М.: «Ай-Эс-Эс Пресс», 2009. – 518 с.
Система распознавания номеров и автоматической фото- и видеофиксации нарушений правил дорожного движения «VOCORD Traffic» [Электронный ресурс] / VOCORD Системы видеонаблюдения и аудиорегистрации. Режим доступа http://www.vocord.ru/218/ (дата доступа 26.03.2011 г.).
Состояние окружающей среды Республики Беларусь : нац. доклад / М-во природ. ресур. и окружающей среды Республики Беларусь, Гос. науч. учр-е «Инс-т природопользования Нац. академ. наук Беларуси» . – Минск : Белтаможсервис, 2010. – 150 с.
Что такое CUDA? [Электронный ресурс] / CUDA Zone nVidia. Режим доступа http://www.nvidia.ru/object/what_is_cuda_new_ru.html (дата обращения 01.15.2012 г.).
Ясинский Ф. Н. Распознавание большого количества образов при помощи нейронных сетей с использованием многопроцессорных систем / Ф. Н. Ясинский, А. С. Мочалов // Вестник Ивановского государственного энергетического университета. – Иваново, 2011. – № 2. – С. 85-87.
Похожие статьи
Новая система эффективного управления транспортным потоком
дорожное движение, VOCORD, общая схема работы системы, транспортный поток... Применение системы «ГЛОНАСС» на автомобильном транспорте...
Разработка рекомендаций по формированию...
В статье предлагаются пошаговые рекомендации по формированию автоматизированной системы управления дорожным движением в г. Волгограде. Раскрыто понятие единой диспетчерской службы и ее основные задачи.
Разработка автоматизированной системы массогабаритного...
Разработка автоматизированной системы массогабаритного контроля большегрузных автомобильных транспортных средств.
Сбором, обработкой и анализом информации о движении на дорогах занимаются информационные дорожные центры страны, информация...
Информационное обеспечение автотранспортных систем
В основе процесса управления материальными потоками лежит обработка информации, циркулирующей в системах различного назначения. Ключевые слова: Информационные технологии, информационные системы, технологии поддержки принятия решений...
Распознавание объектов на основе видеосигнала, полученного...
3) Работа системы управления, слежения и обработки должна проводиться при минимальном участии человека или в автономном режиме.
В процессе предварительной подготовки над видеоизображением производятся следующие операции
Использование SCADA-технологий в современных...
автоматизированная система управления дорожным движением, единая диспетчерская служба, центральный управляющий пункт. Разработка автоматизированной системы управления технологическим процессом...
Ключевые факторы системы управления транспортными...
транспортный поток, управление, система управления, процесс управления, расчет воздействий, процесс движения, темп роста, минимальная затрата времени, транспортный процесс, метод управления.
Навигационное обеспечение системы диспетчерского...
Анализ показал, что, несмотря на появление современных автоматизированных радионавигационных систем диспетчерского управления, автоматизированный контроль за движением транспортных средств на маршруте...
Применение системы «ГЛОНАСС» на автомобильном транспорте...
Расширение возможностей общегородской системы автоматизированного управления дорожным движением по удовлетворению возрастающего спроса на пассажирские и грузовые перевозки на всех видах транспорта
Похожие статьи
Новая система эффективного управления транспортным потоком
дорожное движение, VOCORD, общая схема работы системы, транспортный поток... Применение системы «ГЛОНАСС» на автомобильном транспорте...
Разработка рекомендаций по формированию...
В статье предлагаются пошаговые рекомендации по формированию автоматизированной системы управления дорожным движением в г. Волгограде. Раскрыто понятие единой диспетчерской службы и ее основные задачи.
Разработка автоматизированной системы массогабаритного...
Разработка автоматизированной системы массогабаритного контроля большегрузных автомобильных транспортных средств.
Сбором, обработкой и анализом информации о движении на дорогах занимаются информационные дорожные центры страны, информация...
Информационное обеспечение автотранспортных систем
В основе процесса управления материальными потоками лежит обработка информации, циркулирующей в системах различного назначения. Ключевые слова: Информационные технологии, информационные системы, технологии поддержки принятия решений...
Распознавание объектов на основе видеосигнала, полученного...
3) Работа системы управления, слежения и обработки должна проводиться при минимальном участии человека или в автономном режиме.
В процессе предварительной подготовки над видеоизображением производятся следующие операции
Использование SCADA-технологий в современных...
автоматизированная система управления дорожным движением, единая диспетчерская служба, центральный управляющий пункт. Разработка автоматизированной системы управления технологическим процессом...
Ключевые факторы системы управления транспортными...
транспортный поток, управление, система управления, процесс управления, расчет воздействий, процесс движения, темп роста, минимальная затрата времени, транспортный процесс, метод управления.
Навигационное обеспечение системы диспетчерского...
Анализ показал, что, несмотря на появление современных автоматизированных радионавигационных систем диспетчерского управления, автоматизированный контроль за движением транспортных средств на маршруте...
Применение системы «ГЛОНАСС» на автомобильном транспорте...
Расширение возможностей общегородской системы автоматизированного управления дорожным движением по удовлетворению возрастающего спроса на пассажирские и грузовые перевозки на всех видах транспорта




