




Реализация методов настройки ПИД-регулятора для малоинерционных систем
Авторы: Гусаров Александр Вячеславович, Медведев Евгений Юрьевич
Рубрика: 3. Автоматика и вычислительная техника
Опубликовано в
Дата публикации: 29.05.2019
Статья просмотрена: 513 раз
Библиографическое описание:
Гусаров, А. В. Реализация методов настройки ПИД-регулятора для малоинерционных систем / А. В. Гусаров, Е. Ю. Медведев. — Текст : непосредственный // Технические науки в России и за рубежом : материалы VIII Междунар. науч. конф. (г. Краснодар, июнь 2019 г.). — Краснодар : Новация, 2019. — С. 23-27. — URL: https://moluch.ru/conf/tech/archive/332/15125/ (дата обращения: 25.04.2024).
В работе описывается реализация методов регулирования скорости вращения асинхронного двигателя. Данная тема является актуальной в связи с тем, что в настоящее время настройка параметров системы регулирования скорости вращения асинхронного двигателя является сложной задачей, требующей больших затрат времени на подбор коэффициентов.
Ключевые слова: регулирование скорости вращения, ПИД-регулятор, асинхронный двигатель, автоподбор коэффициентов, алгоритмы, программная реализация.
Регулирование скорости вращения мощного асинхронного двигателя при переменной нагрузке является сложной задачей. Для этого чаще всего используют ПИД-регуляторы. Использование ПИД-регуляторов помогает уменьшить энергетические потери на настройку системы и обеспечивает более быстрый выход на требуемые параметры.
Для эффективной работы регулятора в процессе работы необходимо правильно подбирать его коэффициенты и изменять их при изменении внешних условий. В связи с этим возникает необходимость в разработке программного обеспечения для реализации математических методов настройки регулятора.
В реализованном методе расчёта выходного сигнала U [n] через промежутки времени, равные периоду дискретизации T, в моменты времени n T используется формула
![]() (1)
(1)
гдеn — номер текущего периода дискретизации;
n и n — 1 — текущая и предыдущая ошибка рассогласования соответственно;
Kp, Ki, Kd — пропорциональный, интегральный и дифференциальный коэффициенты ПИД-регулятора.
Ошибка рассогласования n рассчитывается по формуле
n = yn — yзад,(2)
где yn – выходное значение регулятора; yзад — заданное входное значение (уставка).
В процессе реализации регуляторов часто возникает ситуация, когда нет возможности точно поддерживать одинаковый период дискретизации при программном управлении. В этом случае сильно ухудшается качество управления, так как в процессе расчета выходного сигнала не учитывается неравномерность периода дискретизации. Это приводит к появлению такой проблемы, как неверное вычисление значения выходного сигнала на текущем шаге. В этом случае следует выполнить переход к описанию коэффициентов регулятора через постоянные времени интегрирования Ti и дифференцирования Td:
![]() (3)
(3)
![]() (4)
(4)
гдеT — период дискретизации.
Окончательно формула для расчета выходного сигнала цифрового регулятора U [n] примет вид:
 (5)
(5)
гдеn — номер текущего периода дискретизации;
Tn — период дискретизации на текущем шаге;
![]() ,
, ![]() — время запуска функции регулятора на текущем и предыдущем шаге;
— время запуска функции регулятора на текущем и предыдущем шаге;
Ti — постоянная времени интегрирования;
Td — постоянная времени дифференцирования.
Kp — пропорциональный коэффициент ПИД-регулятора.
Период дискретизации на текущем шаге определяется по формуле
![]() (6)
(6)
Данный переход полностью устраняет обозначенную выше проблему ухудшения качества регулирования, так как в нем учитывается время, прошедшее с момента предыдущего расчета выходного сигнала.
В целях адаптации классического алгоритма расчета коэффициентов к решаемой задаче был разработан и реализован модифицированный программный ПИД-регулятор. Алгоритм функции расчёта коэффициентов для классического ПИД-регулятора представлен на рис. 1,а, для метода модифицированного ПИД-регулятора — на рис. 1,б.
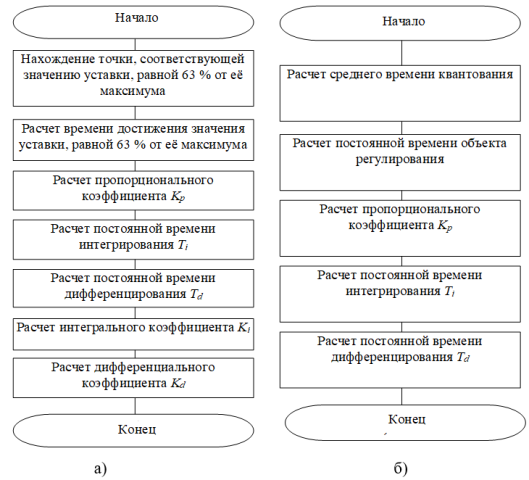
Рис. 1. Алгоритм расчета коэффициентов для ПИД-регулятора: а) классического; б) модифицированного
Ниже приведен текст подпрограммы для реализации регулятора.
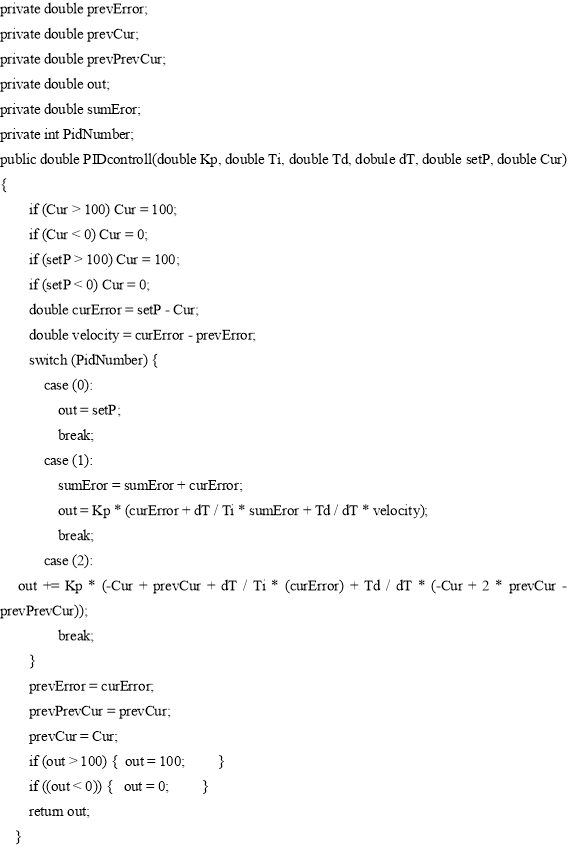
Проведенные на стенде испытания показали работоспособность предложенного алгоритма и его программной реализации.
Литература:
- ПИД-регулятор. [Электронный ресурс]. URL: https://ru.wikipedia.org/wiki/ПИД-регулятор (дата обращения 20.04.1019).
- Назначение регуляторов. [Электронный ресурс]. URL:
- https://elektronchic.ru/avtomatika/pid-regulyator-polnoe-opisanie-primenenie.html (дата обращения 20.04.1019).
- Сазонов А. А. Микропроцессорное управление технологическим оборудованием микроэлектроники: учеб. пособие / А. А. Сазонов. — М.: Радио и связь, 1998. — 264 с.
- Радионов В. Д. Технические средства АСУ ТП: учеб. пособие для вузов /В. Д. Радионов. — М.: Высшая школа, 1989. — 263 с.
Ключевые слова
ПИД-регулятор, алгоритмы, асинхронный двигатель, регулирование скорости вращения, автоподбор коэффициентов, программная реализацияПохожие статьи
Моделирование и анализ производительности...
Потребность в регулировании скорости асинхронного двигателя переменного тока возникает в определенных промышленных областях и этого часто трудно достичь, потому что асинхронные двигатели имеют фиксированную скорость.
Обзор алгоритмов управления асинхронными электроприводами
Система управления скоростью (позицией) вращения асинхронного двигателя в косвенной форме.
Его выходное значение определяет заданное значение скорости вращения
Однако реализация привода мощностью выше 10 кВт таким методом не является эффективной.
Разработка математической модели управления посадкой...
где k — дискретное текущее время с интервалом дискретизации ; - вектор состояний, вектор-столбец размерностью (12x1) и включает в себя неизвестные и подлежащие оцениванию параметры динамической системы; – вектор шумов состояний размерностью (12x1).
Динамическое моделирование прецизионных систем
Входные и выходные переменные, очевидно (как в любой замкнутой системе) должны
При задании фиксированного шага интегрирования имеет место расчёт в заданное количество
В настоящее время при автоматическом выборе шага интегрирования выполняется оценка...
Исследование системы векторного управления...
Канал регулирования электромагнитного момента асинхронного двигателя содержит контур регулирования составляющей тока статора is2 с ПИ-регулятором РТ2 и контур регулирования скорости с П-регулятором РС, на входе которого включен задатчик интенсивности...
Сравнение методов настройки ПИД-регулятора при колебаниях...
Зная параметры объекта регулирования, нетрудно рассчитать коэффициенты ПИД-регулятора.
Функция принадлежности, представляющая терм «малое значение “mal”» выходной лингвистической переменной «постоянная интегрирования ПИД-регулятора “Ti”...
Моделирование САР скорости асинхронного двигателя...
Математическая модель определения угловой скорости вращения координатной системы
Математическая модель оболочки асинхронного двигателя с переменными на основе
В работе [3] в главе 6 «Примеры» дан образец расчета параметров асинхронного двигателя.
Математическое моделирование САР скорости асинхронного...
Математическая модель определения угловой скорости вращения координатной системы приведена на рис. 8.
Расчет коэффициентов по паспортным (справочным) данным.
Полная схема математической модели САР скорости асинхронного двигателя приведена на рис. 12.
Программно-аппаратный комплекс для измерения угловой...
В настоящее время асинхронный привод применяется в разных отраслях
На рисунке 1 представлен алгоритм для определения угловой скорости асинхронного
Хацевский К. В. Алгоритм и способ измерения угловой скорости вращения двигателя в асинхронном...
Похожие статьи
Моделирование и анализ производительности...
Потребность в регулировании скорости асинхронного двигателя переменного тока возникает в определенных промышленных областях и этого часто трудно достичь, потому что асинхронные двигатели имеют фиксированную скорость.
Обзор алгоритмов управления асинхронными электроприводами
Система управления скоростью (позицией) вращения асинхронного двигателя в косвенной форме.
Его выходное значение определяет заданное значение скорости вращения
Однако реализация привода мощностью выше 10 кВт таким методом не является эффективной.
Разработка математической модели управления посадкой...
где k — дискретное текущее время с интервалом дискретизации ; - вектор состояний, вектор-столбец размерностью (12x1) и включает в себя неизвестные и подлежащие оцениванию параметры динамической системы; – вектор шумов состояний размерностью (12x1).
Динамическое моделирование прецизионных систем
Входные и выходные переменные, очевидно (как в любой замкнутой системе) должны
При задании фиксированного шага интегрирования имеет место расчёт в заданное количество
В настоящее время при автоматическом выборе шага интегрирования выполняется оценка...
Исследование системы векторного управления...
Канал регулирования электромагнитного момента асинхронного двигателя содержит контур регулирования составляющей тока статора is2 с ПИ-регулятором РТ2 и контур регулирования скорости с П-регулятором РС, на входе которого включен задатчик интенсивности...
Сравнение методов настройки ПИД-регулятора при колебаниях...
Зная параметры объекта регулирования, нетрудно рассчитать коэффициенты ПИД-регулятора.
Функция принадлежности, представляющая терм «малое значение “mal”» выходной лингвистической переменной «постоянная интегрирования ПИД-регулятора “Ti”...
Моделирование САР скорости асинхронного двигателя...
Математическая модель определения угловой скорости вращения координатной системы
Математическая модель оболочки асинхронного двигателя с переменными на основе
В работе [3] в главе 6 «Примеры» дан образец расчета параметров асинхронного двигателя.
Математическое моделирование САР скорости асинхронного...
Математическая модель определения угловой скорости вращения координатной системы приведена на рис. 8.
Расчет коэффициентов по паспортным (справочным) данным.
Полная схема математической модели САР скорости асинхронного двигателя приведена на рис. 12.
Программно-аппаратный комплекс для измерения угловой...
В настоящее время асинхронный привод применяется в разных отраслях
На рисунке 1 представлен алгоритм для определения угловой скорости асинхронного
Хацевский К. В. Алгоритм и способ измерения угловой скорости вращения двигателя в асинхронном...




