




Система автоматического управления углом поворота нагрузки
Авторы: Ишбулатов Артём Рашитович, Кузнецова Надежда Дмитриевна
Рубрика: 1. Информатика и кибернетика
Опубликовано в
Дата публикации: 03.11.2017
Статья просмотрена: 2089 раз
Библиографическое описание:
Ишбулатов, А. Р. Система автоматического управления углом поворота нагрузки / А. Р. Ишбулатов, Н. Д. Кузнецова. — Текст : непосредственный // Технические науки в России и за рубежом : материалы VII Междунар. науч. конф. (г. Москва, ноябрь 2017 г.). — Москва : Буки-Веди, 2017. — С. 26-29. — URL: https://moluch.ru/conf/tech/archive/286/13203/ (дата обращения: 20.04.2024).
В данной работе проведен анализ исходной системы автоматического управления, включающий проверку соответствия системы требованиям технического задания. Для улучшения показателей исходной системы проведен синтез корректирующего устройства на основе метода ЛАЧХ.
Рассматриваемая автоматическая система является замкнутой, нелинейной из-за наличия усилителя мощности, непрерывной (между входными и выходными величинами всех элементов системы существует непрерывная связь) и одномерной (одна регулируемая величина). Параметры элементов системы не изменяются со временем, следовательно, система стационарная.
Объектом для анализа является система управления углом поворота нагрузки, принципиальная схема которой представлена на рисунке 1.
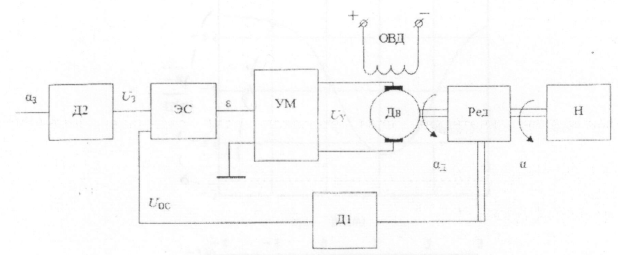
Рис. 1. Принципиальная схема системы управления углом поворота нагрузки
Объектом управления в данной системе является группа элементов, состоящая из двигателя и редуктора. Управляемая величина — угол поворота нагрузки. Датчиком обратной связи служит потенциометр Д1, который механически связан с редуктором (Ред.) Потенциометр преобразует угол ![]() поворота в напряжение
поворота в напряжение ![]() . Опорный (задающий) сигнал
. Опорный (задающий) сигнал ![]() формируется с помощью задающего потенциометра Д2. Элемент сравнения (ЭС) сравнивает рассогласование
формируется с помощью задающего потенциометра Д2. Элемент сравнения (ЭС) сравнивает рассогласование ![]() , который в свою очередь усиливается усилителем мощности (УМ) и подается на обмотку управления двигателя (Дв). Двигатель через редуктор вращает нагрузку (Н), обеспечивая поворот нагрузки на угол
, который в свою очередь усиливается усилителем мощности (УМ) и подается на обмотку управления двигателя (Дв). Двигатель через редуктор вращает нагрузку (Н), обеспечивая поворот нагрузки на угол ![]() .
.
Функциональная схема замкнутой системы управления углом поворота нагрузки представлена на рисунке 2. Усилитель мощности (УМ) выступает в качестве усилительно — преобразовательного элемента (УПЭ), двигатель вместе с редуктором — в качестве объекта управления (ОУ), потенциометр Д1 — в качестве датчика обратной связи.
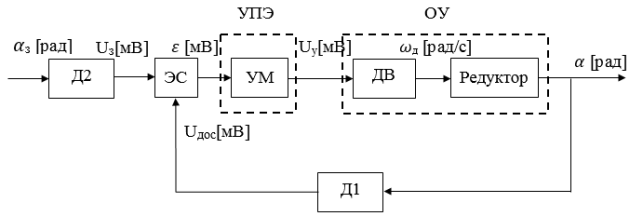
Рис. 2. Функциональная схема системы управления углом поворота нагрузки
Согласно требованиям технического задания должны выполняться следующие условия:
‒ Относительная ошибка (![]() воспроизведения сигнала g=2*sin(2,3) не более 2,3 %;
воспроизведения сигнала g=2*sin(2,3) не более 2,3 %;
‒ Показатель колебательности (M) не более 1,4.
Выполнив анализ показателей качества и точности системы, можно сделать вывод, что показатель колебательности соответствует требованиям технического задания, а относительная ошибка воспроизведения гармонического сигнала не соответствует требованиям ТЗ. Это означает, что систему необходимо корректировать.
Для целей синтеза корректирующего устройства (КУ) чаще всего применяют метод логарифмических амплитудных характеристик, так как построение ЛАЧХ не требует сложных вычислений. Особенно удобно использовать асимптотические ЛАЧХ. [1].
Для того, чтобы осуществить синтез регулятора, необходимо выполнить следующие шаги:
- Построить ЛАЧХ располагаемой системы. Под исходной ЛАЧХ понимается характеристика исходной системы регулирования, построенной исходя из требуемых режимов стабилизации.
- Построить желаемую ЛАЧХ системы. Построение желаемой ЛАЧХ происходит на основании требований, предъявляемых к проектируемой системе регулирования.
- Получить ЛАЧХ последовательного корректирующего устройства вычитанием исходной ЛАЧХ из ЛАЧХ желаемой. По ней получить передаточную функцию корректирующего устройства
- Выполнить физическую реализацию последовательного корректирующего устройства на базе активных или пассивных четырёхполюсников.
- Выполнить расчёт, подтверждающий соответствие спроектированной системы требованиям ТЗ.
Для того, чтоб построить асимптотическую ЛАЧХ исходной системы необходимо записать передаточную функцию разомкнутой системы и определить частоты сопряжения ![]() , где Ti — постоянные времени отдельных звеньев.
, где Ti — постоянные времени отдельных звеньев.
Построение желаемой ЛАЧХ. При построении желаемой ЛАЧХ выделяют три области: низкочастотную область, средне частотную и высокочастотную. Низкочастотная асимптота желаемой ЛАЧХ характеризует точность воспроизведения эталонного сигнала. Область средних частот определяет динамические свойства системы (быстродействие, колебательность). Высокочастотная асимптота отвечает за помехозащищённость системы. С точки зрения упрощения модели корректирующего устройства удобно ВЧ асимптоты выполнить параллельно ВЧ асимптотам исходной ЛАЧХ [2].
Для того, чтобы относительная ошибка воспроизведения входного воздействия не превышала ![]() ЛАЧХ системы должна находиться не ниже контрольной точки Ак с координатами (
ЛАЧХ системы должна находиться не ниже контрольной точки Ак с координатами (![]() ). Область, расположенная ниже контрольной точки Ак и двух прямых, проведённых через нее с наклонами -20 и -40 дб/дек, является запретной областью для ЛАЧХ следящей системы с астатизмом любого порядка [1]. Так как реальная ЛАЧХ в точке перегиба проходит на 3 дБ ниже асимптотической, то чтобы исключить попадание в запретную область, необходимо низкочастотную асимптоту поднять на 3 дБ относительно контрольной точки. На рисунке 3 показано построение запретной области.
). Область, расположенная ниже контрольной точки Ак и двух прямых, проведённых через нее с наклонами -20 и -40 дб/дек, является запретной областью для ЛАЧХ следящей системы с астатизмом любого порядка [1]. Так как реальная ЛАЧХ в точке перегиба проходит на 3 дБ ниже асимптотической, то чтобы исключить попадание в запретную область, необходимо низкочастотную асимптоту поднять на 3 дБ относительно контрольной точки. На рисунке 3 показано построение запретной области.
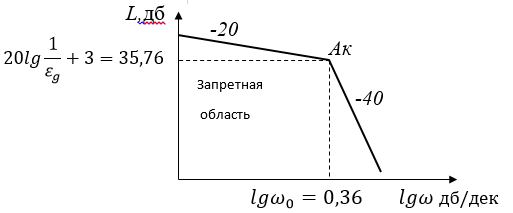
Рис. 3. Построение запретной области
Построение среднечастотного участка. СЧ участок формируется асимптотой с наклоном -20 дб/дек, которая проводится таким образом, чтобы ось частот пересекалась на частоте
После этого совершают сопряжение асимптот среднечастотного и низкочастотного участка.
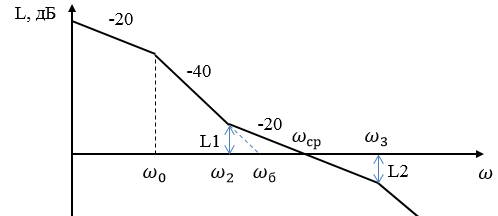
Рис. 4. Построение СЧ участка
Для построения данного участка ЛАЧХ воспользуемся методом Бессекерского, так как в требованиях по показателям качества системы задан показатель колебательности (M=1,4). Согласно методу постоянные времени на участке определяются по следующим формулам:
![]()
![]()
где ![]() малые постоянные времени.
малые постоянные времени.
Построение ВЧ участка. Вид ЛАЧХ на данном участке детерменирует помехоустойчивость системы. Установив, как можно больший наклон асимптот, можно ослабить воздействие высокочастотных помех. Начинать строить высокочастотный участок необходимо на частоте ![]() , затем для уменьшения порядка передаточной функции КУ ВЧ асимптоты проводим параллельно ВЧ асимптотам исходной ЛАЧХ.
, затем для уменьшения порядка передаточной функции КУ ВЧ асимптоты проводим параллельно ВЧ асимптотам исходной ЛАЧХ.
Получаем ЛАЧХ корректирующего участка путем вычитания исходной ЛАЧХ из желаемой ЛАЧХ. По полученной характеристике определяем передаточную функцию КУ, представленную как последовательное соединение инерционных и форсирующих звеньев с определенными постоянными времени.
Передаточная функция синтезированного корректирующего устройства:
![]()
где ![]()
![]()
![]()
![]()
Реализацию будем проводить на базе активного четырехполюсника, схема которого выбирается по передаточной функции и виду ЛАЧХ корректирующего устройства. Параметры элементов схемы выбираются по алгоритму, представленному Смольниковым в [3]. Затем номинальные параметры четырехполюсника выбираются из ряда Е24. Таким образом, передаточная функция корректирующего устройства примет следующий вид:
![]()
Произведем анализ скорректированной по методу ЛАЧХ системы на соответствие требованиям технического задания. Сравнение характеристик полученной после синтеза системы и исходной системы с требованиями ТЗ приведено в таблице 1.
Таблица 1
Сравнение характеристик системы
|
Характеристика системы |
Требование ТЗ |
Исходная система |
Скорректированная система |
|
Относительная ошибка воспроизведения сигнала g=2sin(2,3), % |
не более 2,3 |
37,34 |
2,292 |
|
Показатель колебательности |
не более 1,4 |
1,121 |
1,313 |
Полученные показатели полностью удовлетворяют требованиям технического задания, следовательно, введение корректирующего устройства позволило улучшить характеристики исходной системы.
Литература:
- Бессекерский, В. А. Теория систем автоматического управления / В. А. Бессекерский, Е. П. Попов. — 4-е изд., перераб. и доп. — СПб: Изд-во Профессия, 2004. — 752 с.
- Павловская, О. О. Теория автоматического управления. В 2 ч. Ч. 2: Линейный системы: Учебное пособие. — Челябинск: Изд. ЮУрГУ, 2004. — 75 с.
- Смольников А. П. Линейные Системы Автоматического Управления: учебное пособие / А. П. Смольников — Красноярск: Изд.СФУ, 2007–100 с.
Похожие статьи
Построение непараметрической модели замкнутой ЛДС
исходная система, корректирующее устройство, передаточная функция, техническое задание, угол поворота нагрузки, запретная область, требование ТЗ, построение, низкочастотная асимптота, обратная связь.
Регулирование состояний полета квадрокоптера на базе...
Рубрика: Технические науки. Опубликовано в Молодой учёный №10 (114) май-2 2016 г.
переходной процесс, модель, структура регулятора, система, регулятор, передаточная функция, обратная связь, интегральная часть регулятора, нелинейный элемент, внешнее...
Система автоматического управления малоразмерным...
исходная система, корректирующее устройство, передаточная функция, техническое задание, угол поворота... Формирование подходов к моделированию авиационных...
Построение АФЧХ системы автоматического регулирования...
Система замкнута отрицательной обратной связью, значит расчет передаточной функции системы должен производится по следующей формуле: > Полученный результат: Но для построения амплитудно-частотных и...
Использование метода обратных операторов для синтеза систем...
Приведены примеры использования метода обратного оператора при синтезе технических систем.
Установив, как можно больший наклон асимптот, можно ослабить воздействие высокочастотных помех.
Система автоматического управления углом поворота нагрузки.
Синтез регулятора системы управления электроприводами...
. Основные критерии качества удовлетворяют требованиям тех. задания.
Основные термины (генерируются автоматически): переходной процесс, модель, структура регулятора, система, регулятор, передаточная функция, обратная связь, интегральная часть регулятора...
Расчёт характеристик системы автоматического управления...
Система автоматического управления углом поворота нагрузки. Передаточная функция синтезированного корректирующего устройства. Таким образом, передаточная функция корректирующего устройства примет следующий вид.
Моделирование систем с использованием блока чистого...
Рубрика: Технические науки. Опубликовано в Молодой учёный №6 (53) июнь 2013 г.
1104 с. 3. Черных И. В. Моделирование электротехнических устройств в MATLAB, SimPowerSystem и
Система управления термическим объектом идентификации... Передаточные функции САУ.
Применение нелинейного элемента для модификации структуры...
передаточная функция, переходной процесс, регулятор, регулирование углов, программный пакет, Передаточная функция регулятора угла, параметр ПД-регулятора угла, параметр момента инерции, обратная связь... Построение непараметрической модели замкнутой ЛДС.
Похожие статьи
Построение непараметрической модели замкнутой ЛДС
исходная система, корректирующее устройство, передаточная функция, техническое задание, угол поворота нагрузки, запретная область, требование ТЗ, построение, низкочастотная асимптота, обратная связь.
Регулирование состояний полета квадрокоптера на базе...
Рубрика: Технические науки. Опубликовано в Молодой учёный №10 (114) май-2 2016 г.
переходной процесс, модель, структура регулятора, система, регулятор, передаточная функция, обратная связь, интегральная часть регулятора, нелинейный элемент, внешнее...
Система автоматического управления малоразмерным...
исходная система, корректирующее устройство, передаточная функция, техническое задание, угол поворота... Формирование подходов к моделированию авиационных...
Построение АФЧХ системы автоматического регулирования...
Система замкнута отрицательной обратной связью, значит расчет передаточной функции системы должен производится по следующей формуле: > Полученный результат: Но для построения амплитудно-частотных и...
Использование метода обратных операторов для синтеза систем...
Приведены примеры использования метода обратного оператора при синтезе технических систем.
Установив, как можно больший наклон асимптот, можно ослабить воздействие высокочастотных помех.
Система автоматического управления углом поворота нагрузки.
Синтез регулятора системы управления электроприводами...
. Основные критерии качества удовлетворяют требованиям тех. задания.
Основные термины (генерируются автоматически): переходной процесс, модель, структура регулятора, система, регулятор, передаточная функция, обратная связь, интегральная часть регулятора...
Расчёт характеристик системы автоматического управления...
Система автоматического управления углом поворота нагрузки. Передаточная функция синтезированного корректирующего устройства. Таким образом, передаточная функция корректирующего устройства примет следующий вид.
Моделирование систем с использованием блока чистого...
Рубрика: Технические науки. Опубликовано в Молодой учёный №6 (53) июнь 2013 г.
1104 с. 3. Черных И. В. Моделирование электротехнических устройств в MATLAB, SimPowerSystem и
Система управления термическим объектом идентификации... Передаточные функции САУ.
Применение нелинейного элемента для модификации структуры...
передаточная функция, переходной процесс, регулятор, регулирование углов, программный пакет, Передаточная функция регулятора угла, параметр ПД-регулятора угла, параметр момента инерции, обратная связь... Построение непараметрической модели замкнутой ЛДС.




