В связи с интенсивным развитием силовой преобразовательной электронной техники и микропроцессорных систем управления стала возможной разработка новых видов тягового электропривода, обеспечивающих высокие технико-экономические показатели подвижного состава, автоматическое управление режимами их работы, а также снижение затрат в эксплуатации. Как известно, тяговый электропривод может быть бесколлекторного или коллекторного типа. Про достоинства и недостатки указанных типов тягового электропривода известно достаточно много и, как отмечается во многих источниках, будущее стоит за бесколлекторным типом. Однако на сети железных дорог большая часть локомотивного парка имеет в своем составе именно коллекторные тяговые двигатели, обеспечивающие требуемые характеристики. При этом, если рассматривать локомотивы с коллекторными тяговыми двигателями, практически все они выполнены с последовательным возбуждением, исключение, к примеру, составляют электровозы 2ЭС6.
Если рассматривать тепловозный парк, то все локомотивы с коллекторными тяговыми двигателями работают по системе последовательного возбуждения. В статье приведены результаты расчетов при различных алгоритмах системы возбуждения тяговых двигателей локомотивов, которые подчеркивают возможные преимущества в случае применения системы независимого возбуждения или комбинирования системы независимого и последовательного возбуждения в тепловозной тяге.
При независимом возбуждении регулирование магнитного потока позволяет получить оптимальные характеристики тягового электродвигателя. Поэтому применение тяговых двигателей независимого возбуждения служит одним из путей дальнейшего улучшения тяговых характеристик тепловоза и технико-экономических показателей электропередачи. Однако в этом случае тепловоз необходимо оборудовать более сложной системой регулирования тока возбуждения тяговых электродвигателей.
Для обоснования эффективности применения системы независимого возбуждения на магистральных тепловозах выполним расчет тяговых характеристик на примере тепловоза 2ТЭ116. Тяговые характеристики тепловоза 2ТЭ116 с коллекторными тяговыми двигателями последовательного возбуждения приведены на рисунке 1. Как видно из данного рисунка, характеристики на каждой позиции регулирования «мягкие», т. е. с увеличением скорости движения снижается сила тяги.
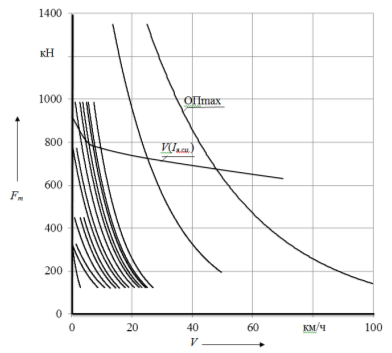
Рис. 1. Тяговые характеристики тепловоза 2ТЭ116
При использовании независимого возбуждения тяговых двигателей ток возбуждения изменяется по закону:
![]()
где ![]() — уставка тока возбуждения, А;
— уставка тока возбуждения, А;
k — коэффициент компаундирования обратной связи по току якоря;
![]() — ток якоря ТЭД, А.
— ток якоря ТЭД, А.
При этом необходимо задаться ограничениями по максимальному току возбуждения, минимальному и максимальному ослаблению возбуждения. Для тепловоза 2ТЭ116 — это ток возбуждения IВ ≤ 800 А, минимальный коэффициент ослабления возбуждения βmin = 0,36.
Выполним расчет следующих вариантов работы системы возбуждения тяговых электродвигателей на анализируемом тепловозе 2ТЭ116.
Первый вариант характеризуется тем, что система управления поддерживает ток возбуждения постоянным за счет изменения коэффициента компаундирования k при постоянном значении уставки тока возбуждения [1, 2]. Ток якоря будет принимать значения от 50 до 720 А. Значение уставки тока возбуждения примем равным 50 А. Расчет будет проводиться для значений тока возбуждения от 100 до 800 А для параллельного соединения тяговых двигателей. Коэффициент компаундирования рассчитывается по формуле:

Для дальнейших расчетов потребуются значения кривой намагничивания двигателей (рисунок 2):
![]()
где Uд — напряжение, приложенное к ТЭД, В;
rд = 0,082 Ом — сопротивление обмоток ТЭД типа ЭД-125;
I — ток двигателя, А;
V — скорость тепловоза, км/ч.
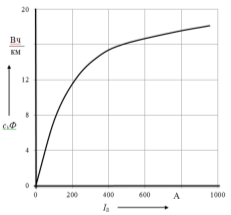
Рис. 2. Кривая намагничивания ТЭД типа ЭД125
Результаты расчета тяговых характеристик при работе системы независимого возбуждения с поддержанием постоянным тока возбуждения приведены на рисунке 3.
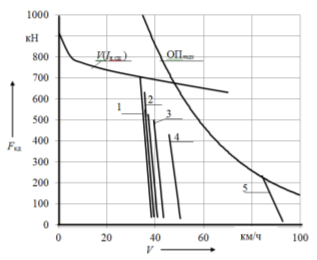
Рис. 3. Тяговые характеристики ТЭД на зонах ослабления возбуждения, при Iв = const на параллельном соединении ТЭД: 1 — Iв = 800 А; 2 — Iв = 650 А; 3 — Iв = 500 А; 4 — Iв = 300 А; 5 — Iв = 150 А
Во втором варианте система управления поддерживает постоянным значение коэффициента компаундирования k, при этом ток возбуждения при постоянном значении уставки равен:
![]()
Результаты расчета тяговых характеристик при работе системы независимого возбуждения с поддержанием постоянным коэффициента компаундирования приведены на рисунке 4.
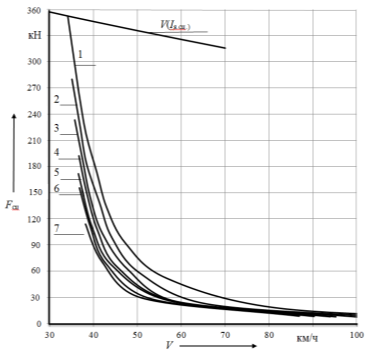
Рис. 4. Тяговые характеристики ТЭД на зонах ослабления возбуждения при k = const: 1 — k = 1; 2 — k = 1,25; 3 — k = 1,5; 4 — k = 1,75; 5 — k = 2; 6 — k = 2,25; 7 — k = 2,5
В третьем варианте система управления поддерживает постоянной скорость тепловоза, при этом ток возбуждения при постоянном значении уставки выбираем из графика кривой намагничивания в зависимости от магнитной постоянной сvФ.
По результатам расчетов можно сделать следующие выводы:
‒ применение независимого возбуждения, за счет реализации различных алгоритмов регулирования тока возбуждения, позволяет получить любые тяговые характеристики;
‒ наибольшую эффективность независимое возбуждение для тепловоза 2ТЭ116 имеет для скоростей свыше 35 км/ч, при этом достигаются высокие показатели силы тяги, широкий диапазон регулирования скорости движения. До 35 км/ч рекомендуется использование последовательного возбуждения тяговых двигателей, что позволит обеспечить высокий пусковой момент, силу тяги и необходимую скорость набора позиций;
‒ работа системы независимого возбуждения может быть использована для имитации последовательного возбуждения тяговых электродвигателей за счет поддержания постоянным коэффициента компаундирования.
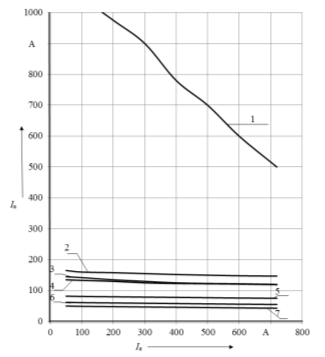
Рис. 5. График зависимости тока якоря от тока возбуждения: 1 — V = 20 км/ч; 2 — V = 32 км/ч; 3 — V = 40 км/ч; 4 — V = 46 км/ч; 5 — V = 60 км/ч; 6 — V = 80 км/ч; 7 — V = 100 км/ч.
Литература:
- Системы управления электрическим подвижным составом постоянного тока: методические указания к курсовой работе для студентов специальности 190300 — «Подвижной состав железных дорог»: утв. ред.-изд. советом ун-та / В. О. Мельк, А. П. Шиляков; Омский государственный университет путей сообщения. — Омск: ОмГУПС, 2014. — 49 с.: рис. — Библиогр.
- Плакс, А. В. Системы управления электрическим подвижным составом: учебник для студентов вузов железнодорожного транспорта по специальности «Электрический транспорт железных дорог»: рекомендовано Управлением кадров и учебных заведений Федерального агентства железнодорожного транспорта / А. В. Плакс; Учебно-методический центр по образованию на железнодорожном транспорте. — Электрон. текстовые дан. — М.: УМЦ ЖДТ, 2005.

