Рассмотрена возможность применения генератора колебаний с хаотической несущей в технических средствах системы управления движением судов.
Ключевые слова: динамический хаос, генератор, технические средства, система управления движением судов
Основными видами технических средств системы управления движением судов (СУДС), обеспечивающих получение информации о состоянии акватории, навигационной обстановке и судах в районе действия СУДС, а также взаимодействие СУДС с участвующими в ее работе судами, являются:
– средства голосовой ОВЧ радиосвязи с судами;
– береговые радиолокационные станции;
– автоматическая информационная (идентификационная) система;
– системы телевизионного наблюдения;
– ОВЧ пеленгаторы;
– метеорологические и гидрологические приборы;
– база данных СУДС.
Функционально структура СУДС подразделяется на подсистемы: сбора информации, дистанционного управления и передачи информации, обработки и отображения информации, связи (рис. 1).
Подсистема сбора информации играет ключевую роль в СУДС, обеспечивая получение данных о местонахождении судов, а также вспомогательной информации (гидрометеорологической, оперативной и т. п.). Основу подсистемы сбора информации формируют БРЛС, по эхо-сигналам которых определяются координаты судов и их элементы движения. Эта подсистема дополнена телевизионной системой наблюдения, а также автоматической идентификационной системой и различными информационными датчиками.
Подсистема дистанционного управления и передачи информации обеспечивает трансляцию сигналов радиолокационного изображения дистанционных БРЛС в ЦСУДС и в обратном направлении — сигналов управления этими БРЛС и другой аппаратуры. В подсистеме применяются радиорелейные линии, однако в последние годы для этой цели все чаще используются и наземные линии связи, передающие цифровой сигнал.
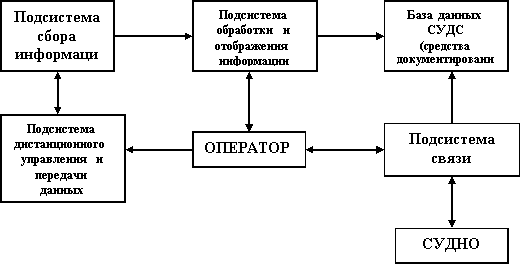
Рис. 1. Функциональная схема СУДС
Подсистема обработки и отображения информации выполняет первичную и вторичную обработку радиолокационных сигналов всех БРЛС, входящих в структуру СУДС, анализ навигационной ситуации, формирование синтезированного изображения окружающей обстановки и отображение этой обстановки на различных средствах индикации (дисплеи компьютеров, графические дисплеи, текстовые дисплеи, и т. п.).
Подсистема связи обеспечивает взаимодействие между судном и оператором СУДС и состоит из различной аппаратуры радиосвязи, работающей в УКВ-диапазоне [1].
На основании Приказа Министерства транспорта РФ от 23.07.15 г. № 226 «Об утверждении Требований к радиолокационным системам управления движением судов, объектам инфраструктуры морского порта, необходимым для функционирования Глобальной морской системы связи при бедствии и для обеспечения безопасности, объектам и средствам автоматической информационной системы, службе контроля судоходства и управления судоходством» в технических средствах СУДС должны быть предусмотрены меры по защите информации от потерь, повреждений и несанкционированного использования.
Таким образом, решение проблем обеспечения надежной, стабильной и устойчивой работы технических средств СУДС, возможности предсказания их поведения на сегодняшний день являются важными и актуальными.
Если несколько десятилетий назад эффект возникновения хаотических колебаний в технических средствах считался «вредным», то сейчас эффект хаотизации — научно обоснованное явление фундаментальной значимости, которое представляет собой возникновение в нелинейных динамических системах сложных непериодических колебаний с непрерывным спектром, применяемое во многих областях науки и техники: электротехнике, строительстве, гидродинамике, робототехнике, телекоммуникации, криптографии, электронике, системах управления, транспортных и медицинских системах [2].
Причинами появления хаоса в системах являются не шумы и внешние факторы, а собственная динамика нелинейной системы, поэтому существует возможность применения хаотических колебаний при создании новых технологий, в частности, применение хаотических колебаний в качестве несущих для передачи информации. Известно несколько способов введения полезного информационного сигнала в хаотическое несущее колебание, что значительно повышает степень защиты системы связи и предотвращает перехват передаваемой информации несанкционированным абонентом. При этом отсутствует необходимость использования дополнительного шифрующего устройства, так как защита передаваемой информации обусловлена особенностями самой системы связи с хаотическим несущим колебанием. В большинстве современных систем связи в качестве носителя информации используются гармонические колебания. Информационный сигнал в передатчике модулирует эти колебания по амплитуде, частоте или фазе, а в приемнике информация демодулируется. Аналогично можно промодулировать хаотический сигнал информационным сигналом. Если в случае гармонической несущей управляемых параметра всего три, то в случае хаотической несущей даже небольшое изменение параметра дает надежно фиксируемое изменение характера колебаний.
Вместе с тем, существует ряд проблем, связанных с тем, что в передатчике и приёмнике необходимо использовать прецизионные электронные компоненты, в противном случае даже при небольшом разбросе параметров элементов, резко ухудшаются характеристики системы связи, и восстановление полезного сигнала из его смеси с хаотической несущей становится весьма затруднительным. В настоящее время проводятся исследования по разработке прямохаотических систем связи и передачи информации, которые лишены указанного выше недостатка. Роль несущего сигнала в данном случае играет не непрерывный сигнал, а последовательность хаотических импульсов.
Другой перспективной областью применения колебаний с хаотической несущей является разработка радиолокационных (РЛС) и дальномерных систем с повышенным разрешением по дальности, которое может достигать нескольких миллиметров. Среди преимуществ данных типов радиолокаторов — возможность снижения мощности передатчика по сравнению с РЛС, использующими в качестве зондирующего сигнала последовательность коротких импульсов. Ширина спектра зондирующего сигнала в данном случае определяется не длительностью импульса, а характеристиками заполняющего хаотического радиосигнала. Вследствие слабой коррелированности генерируемых хаотических сигналов при незначительном изменении начальных условий, существует возможность одновременной работы нескольких РЛС в одних и тех же частотном диапазоне и области пространства при сохранении высокой электромагнитной совместимости. Важным преимуществом хаотических РЛС является сложность установления целью самого факта обнаружения и захвата, так как объект в данном случае облучается сигналом, близким по своим свойствам к случайному процессу, то есть шуму.
Ключевым элементом всех перечисленных радиотехнических систем является генератор колебаний с хаотической несущей (ГКХН). Именно он определяет подавляющее большинство интегральных параметров системы [3].
Для успешного решения каждой конкретной прикладной задачи более строгие требования предъявляются в первую очередь к тем или иным свойствам хаотического сигнала (статистическим, корреляционным, спектральным и т. д.) и параметрам самого ГКХН. Однако к устойчивости хаотического режима, равномерности шумового спектра и прочим важным параметрам источника хаотического сигнала непременно предъявляются высокие требования вне зависимости от назначения устройства.
В настоящее время источники хаотических колебаний разрабатываются на основе различных нелинейных элементов: биполярных и полевых транзисторов, операционных усилителей, диодов с накоплением заряда, варакторов, диодов Чуа и лавинно-пролетных диодах, ферромагнитных плёнок и т. д. Достижения в области создания интегральных схем на основе высокочастотных транзисторов позволяют предположить, что в ближайшем будущем будут разработаны шумовые источники в интегральном исполнении, способные работать на частотах вплоть до 20–30 ГГц. Подобные устройства в настоящее время способны работать в частотном диапазоне вплоть до нескольких гигагерц [4], но выходная мощность таких приборов, как правило, мала, а коэффициент полезного действия (КПД) не превышает нескольких процентов.
ГКСХН являются относительно простыми устройствами, способными порождать сложные непериодические колебания, которые полностью определяются свойствами самой динамической системы. Поэтому, ГКСХН обладает следующими свойствами:
– способность в одном устройстве реализовать большое количество различных динамических режимов;
– возможность управления хаотическими режимами путём малых изменений параметров системы;
– большая информационная ёмкость;
– разнообразие методов ввода информационного сигнала в хаотический;
– увеличение скорости модуляции по отношению к модуляции регулярных сигналов;
– возможность самосинхронизации передатчика и приёмника; нетрадиционные методы мультиплексирования;
– обеспечение конфиденциальности при передаче сообщений.
Кроме того, колебания с хаотической несущей обладают рядом свойств, которые могут быть полезны при передаче и обработке информации:
– возможность получения сложных колебаний с помощью простых по структуре устройств, при этом в одном устройстве можно реализовать большое количество различных хаотических мод;
– управления хаотическими режимами путем малых изменений параметров системы;
– увеличения скорости модуляции по отношению к модуляции регулярных сигналов за счет чувствительности хаотической системы к внешним возмущениям;
– повышения уровня конфиденциальности при передаче сообщений.
Немаловажное свойство хаотических сигналов состоит в том, что в них можно вводить информационные сигналы с полосой, достигающей по ширине полосы самих хаотических сигналов, практически без изменения полосы и формы спектра последних. Тем самым, появляется возможность достаточно простой реализации не только широкополосных, но и сверхширокополосных радиотехнических систем.
Для повышения разнообразия динамических режимов ГКСХН и стойкости к взлому систем передачи данных требуется повышение сложности вида нелинейной передаточной характеристики соответствующего элемента в ГКСХН. Например, замена квадратичной (параболической) нелинейности некой комбинацией (композицией) парабол.
Очевидно, что популярность детерминированного хаоса в области прикладных исследований в дальнейшем будет возрастать. Для оптимизации процесса разработки ГКХН с требуемыми характеристиками необходим простой и точный инструмент для моделирования устройств со сложной динамикой на стадии их разработки, иначе процесс разработки сведётся к методу последовательных приближений — изготовлению нового экспериментального макета путём исследования и корректировки предыдущего.
Литература:
- Тюфанова, А. А. Методика анализа эксплуатационной надежности технических средств системы управления движением судов на примере порта Новороссийск/ А. А. Тюфанова. — Казань: Изд-во «Бук», 2015. — 104 C.
- Banerjee, S. Applications of chaos and nonlinear dynamics in engineering/ S.Banerjee, M.Mitra, L.Rondoni/ Vol.1.-Springer, 2011.-348 p.
- Магницкий, Н. А. Теория динамического хаоса//М.: ЛЕНАНД, 2011. — 320 С.
- Rondoni, L. Applications of chaos and nonlinear dynamics in engineering /S.Banerjee, L.Rondoni/ — Vol.3.-Springer, 2013.-297 p.

