




Исследование параметров управляющего устройства двухдвигательного электропривода переменного тока
Авторы: Джулаева Жазира Тулегеновна, Касымова Айнур Есбергеновна, Садвокасова Жадыра Джумагазиевна
Рубрика: 5. Энергетика
Опубликовано в
Дата публикации: 25.06.2016
Статья просмотрена: 291 раз
Библиографическое описание:
Джулаева, Ж. Т. Исследование параметров управляющего устройства двухдвигательного электропривода переменного тока / Ж. Т. Джулаева, А. Е. Касымова, Ж. Д. Садвокасова. — Текст : непосредственный // Технические науки: проблемы и перспективы : материалы IV Междунар. науч. конф. (г. Санкт-Петербург, июль 2016 г.). — Санкт-Петербург : Свое издательство, 2016. — С. 59-63. — URL: https://moluch.ru/conf/tech/archive/166/10760/ (дата обращения: 24.04.2024).
Рассматривается алгоритм синтеза параметров управляющего устройства асинхронного электропривода с системой преобразователь частоты — асинхронный двигатель на ЭВМ.
Ключевые слова: асинхронный электропривод, преобразователь частоты, среда MATLAB, управляющее устройство, энергосберегающий электропривод, система управления
An algorithm of synthesis of parameters of the control device of asynchronous electric drive with frequency Converter — the asynchronous engine computer
Key words: Asynchronous electric drive, frequency Converter, MATLAB, control device, energy-saving electric drive, control system.
Пуск и торможение асинхронного электропривода переменного тока является одним из основных режимов работы асинхронного электропривода, в особенности для осуществления непрерывного технологического процесса многих производственных машин и установок. Плавный пуск и торможение асинхронного электропривода — одно из необходимых требований технологического процесса производственных машин [1,2,3]. При проектировании управляющего устройства возникает задача выбора его параметров, обеспечивающее плавный пуск движением электроприводом с системой преобразователь частоты — асинхронный двигатель (ПЧ — АД). Структурная схема двухдвигательного асинхронного электропривода с системой ПЧ — АД в среде MATLAB представлена на рисунке 1.
Как видно из рисунка 1, структурная схема состоит из двух идентичных однодвигательных асинхронных электроприводов, напряжения с датчиков скорости каждого двигателя суммируются (![]()
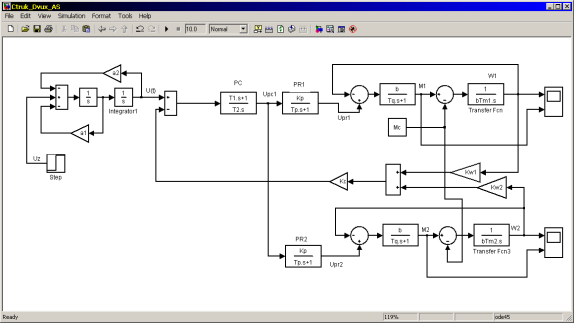
Рис. 1. Структурная схема двухдвигательного асинхронного электропривода с системой ПЧ — АД
В свою очередь сигнал с суммирующего звена подается вход звена с коэффициентом связи ![]() , далее сигнал подается на вход суммирующего звена системы, где сравнивается с сигналом управления
, далее сигнал подается на вход суммирующего звена системы, где сравнивается с сигналом управления ![]() Управляющее устройство, на структурной схеме, представлено двумя интегрирующими звеньями с коэффициентами обратных связей
Управляющее устройство, на структурной схеме, представлено двумя интегрирующими звеньями с коэффициентами обратных связей ![]() и
и ![]() Структурная схема двухдвигательного асинхронного электропривода cоставлена на основе линеаризованной системы однодвигательного асинхронного электропривода [3]. Математическая модель управляющего устройства описывается следующими дифференциальными уравнениями:
Структурная схема двухдвигательного асинхронного электропривода cоставлена на основе линеаризованной системы однодвигательного асинхронного электропривода [3]. Математическая модель управляющего устройства описывается следующими дифференциальными уравнениями:
![]()
![]() , (1)
, (1)
где ![]() — задающее воздействие на входе устройства управления,
— задающее воздействие на входе устройства управления, ![]() — управление системы. Численные значения параметров асинхронных двигателей и преобразователей частоты известны. Поэтому определению подлежат параметры управляющего устройства
— управление системы. Численные значения параметров асинхронных двигателей и преобразователей частоты известны. Поэтому определению подлежат параметры управляющего устройства ![]() и
и ![]() , коэффициент связи
, коэффициент связи ![]() и постоянные времени регулятора скорости (РС)
и постоянные времени регулятора скорости (РС) ![]() . Указанные параметры должны быть рассчитаны таким образом, чтобы переходные процессы скоростей асинхронных двигателей с системой ПЧ — АД получались без перерегулирования и без колебаний, т. е. близкие к оптимальному процессу. Для решения задачи синтеза параметров регулятора скорости, коэффициента связи и параметров управляющего устройства, динамику замкнутого частотно — регулируемого двухдвигательного асинхронного электропривода представим следующей системой дифференциальных уравнений при
. Указанные параметры должны быть рассчитаны таким образом, чтобы переходные процессы скоростей асинхронных двигателей с системой ПЧ — АД получались без перерегулирования и без колебаний, т. е. близкие к оптимальному процессу. Для решения задачи синтеза параметров регулятора скорости, коэффициента связи и параметров управляющего устройства, динамику замкнутого частотно — регулируемого двухдвигательного асинхронного электропривода представим следующей системой дифференциальных уравнений при ![]() :
:
![]()
![]()
![]()
![]() (2)
(2)
![]()
![]()
![]()
![]()
![]()
![]()
где ![]() приращение скорости вращения двигателя;
приращение скорости вращения двигателя;
![]() приращение угловой скорости электромагнитного поля;
приращение угловой скорости электромагнитного поля;
![]() приращение напряжения на выходе регулятора скорости;
приращение напряжения на выходе регулятора скорости;
![]() передаточный коэффициент преобразователя частоты (ПЧ);
передаточный коэффициент преобразователя частоты (ПЧ);
![]() постоянная времени цепи управления ПЧ;
постоянная времени цепи управления ПЧ;
![]() эквивалентная электромагнитная постоянная времени цепи
эквивалентная электромагнитная постоянная времени цепи
статора и ротора АД;
![]() электромеханическая постоянная времени двигателя;
электромеханическая постоянная времени двигателя;
![]() постоянные времени регулятора скорости;
постоянные времени регулятора скорости;
С целью удобства решения поставленной задачи систему уравнений (2) запишем в следующем виде:
![]()
![]()
![]()
![]() (3)
(3)
![]()
![]()
![]()
![]()
![]()
![]()
![]()
здесь
![]()
Структурная схема алгоритма [4] cинтеза параметров системы (3) приведена на рисунке 2.
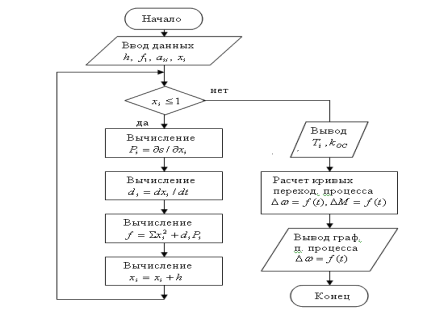
Рис. 2. Алгоритм синтеза параметров
Процедура вычислений заключается в следующем:
– Вводятся исходные данные — величина шага ![]() по каждой переменной
по каждой переменной ![]() , вводится начальное приближение функции многих переменных
, вводится начальное приближение функции многих переменных ![]() , задаются случайные значения (с использованием датчика случайных величин) коэффициенты
, задаются случайные значения (с использованием датчика случайных величин) коэффициенты ![]() квадратичной формы функции
квадратичной формы функции ![]() ;
;
– Проверяется условие выполнения неравенства численного значения переменной ![]() ;
;
– Вычисляются частные производные квадратичной функции ![]() по каждой переменной
по каждой переменной ![]() ;
;
– Вычисляются численные значения правой части системы дифференциальных уравнений (3) ![]() ;
;
– Вычисляется минимум функции многих переменных ![]() методом сканирования, представляющая собой сумму функции Ляпунова
методом сканирования, представляющая собой сумму функции Ляпунова ![]() и её полной производной
и её полной производной ![]() ;
;
– Вычисляется новые численные значения переменных
В случае невыполнения условия выводятся численные значения постоянных времени регулятора скорости ![]() , коэффициента связи
, коэффициента связи ![]() и коэффициентов устройства управления
и коэффициентов устройства управления ![]() .
.
При полученных численных значений выше указанных параметров системы осуществляется расчет кривых переходного процесса скорости по дифференциальным уравнениям методом Рунге — Кутта;
Для визуального наблюдения за качеством переходных процессов графики переходных процессов выводятся на экран дисплея.
Результаты расчетов, полученные при решении задачи синтеза параметров управляющего устройства и системы управления, приведены в таблице 1.
Таблица 1
|
|
|
|
|
|
|
5,93 |
0,11 |
0,54 |
5,6 |
5,4 |
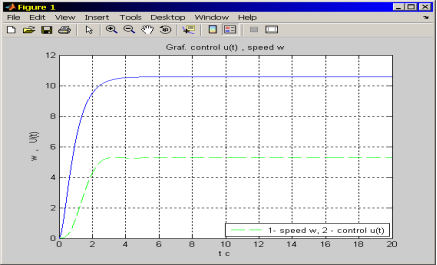
Рис. 3. Кривые переходных процессов управления U(t) и скорости асинхронного двигателя w
Выводы
- Разработана система управления двухдвигательным асинхронным электроприводом с системой «преобразователь частоты — асинхронный двигатель».
- Разработана методика расчета параметров управляющего устройства и системы управления двухдвигательным асинхронным электроприводом.
Литература:
- Браславский И. Я., Ишматов З. Ш., Поляков В. Н. Энергосберегающий асинхронный электропривод. — М.: Издательский центр «Академия», 2004, с. 134–136.
- Розанов Ю. К., Соколова Е. М. Электронные устройства электромеханических систем. — М.: Издательский центр «Академия», 2004, с. 179–180.
- Терехов В. Н., Осипов О. И. Системы управления электроприводов. — М.: Издательский центр «Академия», 2008, с. 190–198.
- Сагитов П. И., Тергемес К. Т., Шадхин Ю. И. Параметрический синтез системы управления многодвигательного асинхронного электропривода //Вестник Алматинского университета энергетики и связи. — 2011. — № 2(13). с. 63–66.
Ключевые слова
система управления, асинхронный электропривод, преобразователь частоты, среда MATLAB, управляющее устройство, энергосберегающий электроприводПохожие статьи
Моделирование прямого пуска асинхронного двигателя с ШИМ...
Обзор алгоритмов управления асинхронными электроприводами. 4. Нечувствительность системы векторного управления скоростью к изменениям параметров асинхронного двигателя. Описанная стратегия имеет ряд недостатков: 1...
Обзор алгоритмов управления асинхронными...
асинхронный двигатель, система управления, векторное управление, трансформация координат, инвертор напряжения, тяговый электропривод троллейбусов, статорный ток, позиция ротора, случай управления, стратегия...
Анализ устойчивости замкнутой нелинейной системы...
Дается математическое описание замкнутой системы управления ПЧ-АД, и программа расчета фазовой траектории системы. Ключевые слова: линеаризированная система, фазовая траектория, преобразователь частоты, асинхронный двигатель.
Исследование нелинейной системы «Преобразователь частоты...
оптимальное управление, структурная схема, замкнутая система, асинхронный двигатель, MATLAB, переходной процесс, нелинейная система, программа расчета, система уравнений, идеальное релейное звено.
Математическое моделирование электропривода на базе...
асинхронный двигатель, система управления, векторное управление, трансформация координат, инвертор напряжения, тяговый электропривод троллейбусов, статорный ток, позиция ротора, случай управления...
Исследования нелинейного корректирующего устройства...
Нелинейное корректирующее устройство замкнутой системы «Преобразователь частоты – асинхронный двигатель» с короткозамкнутым ротором аналогично звену переменной структуры.
Исследование методов оптимизации энергосбережения...
Решение задачи выбора параметров (синтеза) управляемого электропривода осуществляется на основе линеаризованной замкнутой системы ПЧ-АД [2], структурная схема которой представлена на рисунке 1 в среде MATLAB.
Математическое моделирование короткозамкнутого асинхронного...
Моделирование прямого пуска асинхронного двигателя с ШИМ... асинхронный двигатель, блок, параметр блоков, параметр, раздел, электромагнитный момент, шинный селектор, трехфазный асинхронный двигатель, номинальная частота, расположение блоков.
Моделирование системы электрического вала на двух...
Обзор алгоритмов управления асинхронными электроприводами.
Моделирование прямого пуска асинхронного двигателя с ШИМ...
блок, ABC, асинхронный двигатель, векторное управление, параметр блоков, преобразователь координат, регулятор скорости...
Похожие статьи
Моделирование прямого пуска асинхронного двигателя с ШИМ...
Обзор алгоритмов управления асинхронными электроприводами. 4. Нечувствительность системы векторного управления скоростью к изменениям параметров асинхронного двигателя. Описанная стратегия имеет ряд недостатков: 1...
Обзор алгоритмов управления асинхронными...
асинхронный двигатель, система управления, векторное управление, трансформация координат, инвертор напряжения, тяговый электропривод троллейбусов, статорный ток, позиция ротора, случай управления, стратегия...
Анализ устойчивости замкнутой нелинейной системы...
Дается математическое описание замкнутой системы управления ПЧ-АД, и программа расчета фазовой траектории системы. Ключевые слова: линеаризированная система, фазовая траектория, преобразователь частоты, асинхронный двигатель.
Исследование нелинейной системы «Преобразователь частоты...
оптимальное управление, структурная схема, замкнутая система, асинхронный двигатель, MATLAB, переходной процесс, нелинейная система, программа расчета, система уравнений, идеальное релейное звено.
Математическое моделирование электропривода на базе...
асинхронный двигатель, система управления, векторное управление, трансформация координат, инвертор напряжения, тяговый электропривод троллейбусов, статорный ток, позиция ротора, случай управления...
Исследования нелинейного корректирующего устройства...
Нелинейное корректирующее устройство замкнутой системы «Преобразователь частоты – асинхронный двигатель» с короткозамкнутым ротором аналогично звену переменной структуры.
Исследование методов оптимизации энергосбережения...
Решение задачи выбора параметров (синтеза) управляемого электропривода осуществляется на основе линеаризованной замкнутой системы ПЧ-АД [2], структурная схема которой представлена на рисунке 1 в среде MATLAB.
Математическое моделирование короткозамкнутого асинхронного...
Моделирование прямого пуска асинхронного двигателя с ШИМ... асинхронный двигатель, блок, параметр блоков, параметр, раздел, электромагнитный момент, шинный селектор, трехфазный асинхронный двигатель, номинальная частота, расположение блоков.
Моделирование системы электрического вала на двух...
Обзор алгоритмов управления асинхронными электроприводами.
Моделирование прямого пуска асинхронного двигателя с ШИМ...
блок, ABC, асинхронный двигатель, векторное управление, параметр блоков, преобразователь координат, регулятор скорости...




