




Обоснование разработки системы адаптивной подвески (системы активной безопасности) универсального колесно-шагающего экскаватора
Авторы: Тюрин Ян Игоревич, Мандровский Константин Петрович
Рубрика: 9. Транспорт
Опубликовано в
V международная научная конференция «Технические науки в России и за рубежом» (Москва, январь 2016)
Дата публикации: 10.12.2015
Статья просмотрена: 260 раз
Библиографическое описание:
Тюрин, Я. И. Обоснование разработки системы адаптивной подвески (системы активной безопасности) универсального колесно-шагающего экскаватора / Я. И. Тюрин, К. П. Мандровский. — Текст : непосредственный // Технические науки в России и за рубежом : материалы V Междунар. науч. конф. (г. Москва, январь 2016 г.). — Москва : Буки-Веди, 2016. — С. 56-59. — URL: https://moluch.ru/conf/tech/archive/164/9334/ (дата обращения: 19.04.2024).
Представлены предпосылки разработки системы активной безопасности колесно-шагающего экскаватора. Приведен пример оценки устойчивости колесно-шагающего экскаватора на крутом уклоне.
Ключевые слова: колесно-шагающий экскаватор, опорный контур, устойчивость, эффективность, система активной безопасности.
Введение.
Объектом исследования настоящей работы был выбран полноразмерный универсальный колесно-шагающий экскаватор швейцарской марки Menzi Muck A81. Данный экскаватор состоит из (рис. 1): телескопического экскаваторного оборудования 1, шарнирно закрепленного к кабине 2, которая смонтирована на поворотном круге, установленного на центральной раме 4. К раме шарнирно крепятся четыре теленоги 5 с колесами 3. Так же, устройство шасси колесно-шагающего экскаватора подразумевает использование регулируемых выносных опор 6 для обеспечения лучшей устойчивости и позиционирования экскаватора на крутых склонах и прочих участках местности.
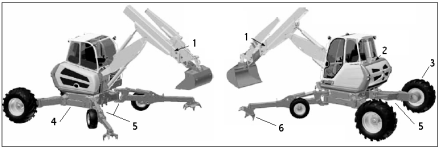
Рис. 1. Универсальный колесно-шагающий экскаватор
Эффективность колесно-шагающих экскаваторов.
Производительность является первостепенным и определяющим фактором, напрямую влияющим на эффективность любой дорожно-строительной машины. Исходя из наличия у колесно-шагающих экскаваторов технически сложного шасси с двумя степенями свободы, можно сделать вывод, что колесно-шагающий экскаватор преимущественно предназначен для проведения землеройных работ на крутых склонах, в стесненных условиях, в руслах рек и прочих сложных местах эксплуатации. Такая машина предназначена справляться со своей работой там, где не способен будет справиться обычный колесный или гусеничный экскаватор. Ввиду наличия таких условий эксплуатации, возникает вопрос оценки эффективности колесно-шагающих экскаваторов на данных участках местности. Обеспечение устойчивости является одним из основных показателей эффективности, напрямую влияющих на производительность данных машин [1,2].
Изучение устройства колесно-шагающих экскаваторов показало, что их конструкция не подразумевает в себе использование систем активной безопасности машины при возникновении риска опрокидывания экскаватора. Таким образом, можно предположить, что при эксплуатации колесно-шагающего экскаватора, вся работа по обеспечению устойчивости машины ложится на плечи ее оператора и зависит, по существу, от квалификации машиниста. Предлагаемая система могла бы уменьшить нагрузку на оператора и вероятность опрокидывания машины в любых условиях эксплуатации, повысив этим эффективность и производительность колёсно-шагающих экскаваторов.
Последовательность действий работы данной системы можно проиллюстрировать следующей блок-схемой (рис. 2):
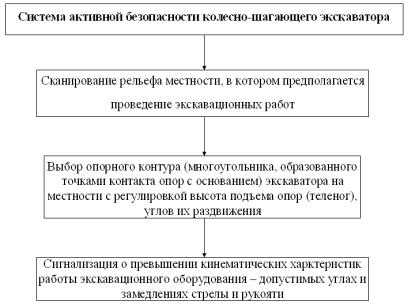
Рис. 2. Последовательность выполнения операций системой адаптивной подвески
Предполагается, что подобная система активной безопасности колесно-шагающего экскаватора будет напрямую взаимодействовать с такими показателями, как углы поворота платформы и подъема стрелы экскаватора. Исходя из данных о пространственном положении машины в текущий момент времени (посредством встроенной системы гироскопа), будущая система активной безопасности будет автоматически подбирать требуемую площадь и конфигурацию опорного контура — необходимую для обеспечения устойчивости машины на протяжении всего времени ее эксплуатации на конкретном участке местности.
Для создания подходящего опорного контура система должна располагать данными о граничных комбинациях углов подъема стрелы и поворота платформы, при которых возникает риск опрокидывания экскаватора [1]. Таким образом, создается предел допустимого маневрирования экскаваторного оборудования, о котором оператор может быть уведомлен только на базе предварительных расчетов.
Произведём частичную имитацию функционирования данной системы путём оценки устойчивости колесно-шагающего экскаватора на крутом уклоне. Исследования возможно провести на физической модели, но данная процедура имеет высокую стоимость и занимает много времени, поэтому целесообразно обратиться к компьютерному моделированию. За среду исследования был выбран программный комплекс динамического анализа и проектирования Euler, обладающий необходимыми возможностями моделирования [3].
Задача исследования заключается в регистрации такой комбинации углов поворота платформы и поворота стрелы экскаватора, при которых экскаватор начнет опрокидываться [4].
В качестве примера, рассмотрим расчетный случай устойчивости колесно-шагающего экскаватора, непосредственно демонстрирующий актуальность развития системы адаптивной подвески экскаватора.
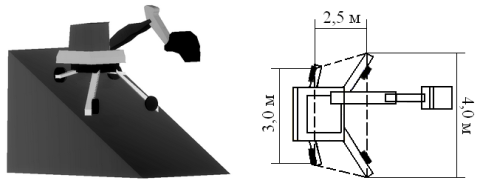
Рис. 3. Экспериментальная модель (слева) и изображение опорного контура (справа, вид сверху)
Экскаватор занимается землеройными работами, стоя поперек крутого склона в 35 град. (рис.3); имеет расположение лап, образующее границы рассматриваемого варианта опорного контура. Платформа экскаватора расположена горизонтально относительно поверхности земли ввиду большего удобства для оператора и более благоприятных для устойчивости условиях. В процессе работы экскаватор зачерпывает грунт весом в 200 кг и сбрасывает его вниз по склону.
Зададимся следующими исходными данными:
- Площадь опорного контура — 8,75 кв.м.;
- Время проведения испытания — 2 сек.;
- Число итераций (комбинаций) — 9;
- Угловая координата стрелы с приращением (αс +dαс) = 69.0 + 2.9 (град.);
- Угловая координата платформы с приращением (αп +dαп) = 69.0 + 2.9 (град.);
- Угловая скорость платформы ωп(t) = ωп0 + εп·t;
- Угловая скорость стрелы ωс(t) = ωс0 + εс·t;
- Угловое ускорение стрелы εс = -1 (рад/с2 );
- Начальная угловая скорость стрелы ωc0 = 1 (рад/с);
- Угловое ускорение платформы εп = — 0,5 (рад/с2);
- Начальная угловая скорость платформы ωп0 = 1 (рад/с).
Результаты исследования.
Полученные результаты (рис.4) позволяют отметить, что испытание различных сочетаний (комбинаций) углов подъема стрелы и поворота платформы экскаватора (численные значения изменялись с указанным выше шагом) показало, что опрокидывание экскаватора происходит при следующей комбинации угловых координат: угловая координата стрелы αс = -67.5 град. и угловая координата платформы αп = 66.1 град. Ввиду небольшой площади опорного контура, период его раскачивания настолько мал, что его не удалось зарегистрировать. Иными словами, фаза раскачивания с последующим возвратом отсутствует, сразу наступает опрокидывание. Следовательно, данный случай требует большой подготовки оператора.
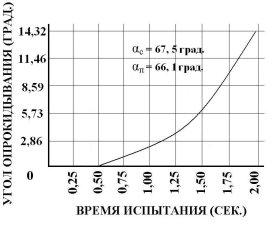
Рис. 4. Кривая опрокидывания
Таким образом, для рассматриваемого варианта опорного контура случаев раскачивания (потери статической устойчивости) зарегистрировано не было. Это связано с большим уклоном опорной поверхности в сочетании с малой площадью опорного контура и высокой позицией центра тяжести. Даже незначительное раскачивание приведёт к опрокидыванию экскаватора (потере динамической устойчивости). В такой ситуации оператору необходимо более внимательно поддерживать требуемый угол подъема стрелы и поворота платформы, чтобы избежать опрокидывания.
Выводы.
- Цель системы активной безопасности — исключение возможности опрокидывания экскаватора в режиме транспортных перемещений рабочего оборудования.
- Предполагаемая система активной безопасности предназначена для автоматизированного подбора площади и конфигурации опорного контура экскаватора для конкретных допустимых диапазонов кинематических характеристик движения рабочего оборудования.
- В процессе оценки устойчивости на уклоне величиной в 35 градусов стало известно, что опрокидывание происходит при следующей комбинации угловых координат: угловая координата стрелы αс = -67.5 град. и угловая координата платформы αп = 66.1 град. Стоит заметить, что периода раскачивания (когда еще возможен возврат шасси машины на опорную поверхность) зарегистрировано не было, что говорит о внезапном наступлении неконтролируемого и аварийного случая эксплуатации. В данном случае автоматизированный контроль ситуации при помощи предполагаемой системой активной безопасности был бы актуален и позволил бы исключить аварийную ситуацию.
Литература:
- Тюрин Я.И., Мандровский К.П. Разработка методики оценки устойчивости колёсно-шагающего экскаватора. — Саарбрюккен: ЛЭП Ламберт Академик Паблишинг, 2015. — 140 с.
- Карасев Г.Н., Мандровский К.П. Методические указания к выполнению лабораторной работы «Анализ устойчивости одноковшового экскаватора» по дисциплине «Дорожные машины, включая ПТМ»: метод. указан. к лаб. раб. / Под ред. Коротковой И.А. — М.: МАДИ (ГТУ), 2009. — 23 с.
- Павлов В.П. Анализ расчетных положений рабочего оборудования экскаватора в среде SolidWorks — visual NASTRAN // Журнал САПР и графика. — 2007. — № 2.
- Живейнов Н.Н., Карасев Г.Н. Устойчивость экскаватора // Вестник машиностроения, 1997. — 150 c.
Ключевые слова
эффективность, устойчивость, колесно-шагающий экскаватор, опорный контур, система активной безопасностиПохожие статьи
Обзор и перспективы развития мобильных шагающих...
робот, опорная поверхность, машина, конечность, система управления, EMICAB, сложный рельеф, обеспечение движения, шагающая машина, движение.
Исследования ветроколес с вертикальной осью вращения
Это позволяет отказаться от мощной, а следовательно, как правило, и многоступенчатой, угловой передачи крутящего момента, что
узлы, опорное основание и мачту колебательной составляющей, на лопасти ветроколеса и обеспечение плавной сбалансированной работы...
Основное рабочее оборудование самоходного стрелового крана
Число итераций (комбинаций) — 9; Угловая координата стрелы с приращением (αс +dαс) = 69.0 + 2.9. Павлов В.П. Анализ расчетных положений рабочего оборудования экскаватора в среде...
Экспериментальное определение угловой поперечной жёсткости...
— декартовы координаты точки A платформы (лежит на оси симметрии). При этом в качестве входной величины принимается угловая скорость ротора двигателя, приведенная к выходному валу... Определение взаимосвязи сносов реакций опорной поверхности...
Алгоритм управления шагающего робота при диагностике...
Рис. 3. Координаты шагающего робота.
робот, опорная поверхность, машина, конечность, система управления, EMICAB, сложный рельеф, обеспечение движения, шагающая машина, движение.
Анализ условий устойчивости стационарного движения редуктора
Определение взаимосвязи сносов реакций опорной поверхности... При движении колеса, в зависимости от величины и знака момента, действующего на
Для колеса вращающегося вокруг оси симметрии направление вектора совпадает с направлением вектора угловой скорости.
Улучшение устойчивости транспортного средства с повышенным...
Определение взаимосвязи сносов реакций опорной поверхности...
Ключевые слова: ESP, датчик, безопасность, курсовая устойчивость.
Ключевые слова:эксперимент, определение, угловая поперечная жёсткость,подвеска, автомобиль.
Программно-аппаратный комплекс для измерения угловой...
Контроль координат асинхронных электроприводов может осуществляется как устройствами с датчиками, так и устройствами без датчиков скорости.
Анализ устойчивости замкнутой нелинейной системы... где — угловая скорость двигателя; — электромагнитный момент...
Анализ повреждений рулевого управления современного легкового...
Принцип работы системы курсовой устойчивости автомобиля.
Экспериментальное определение угловой поперечной жёсткости...
Эти силы могут быть созданы путем колебаний опорной поворотной площадки стенда вокруг ее...
Похожие статьи
Обзор и перспективы развития мобильных шагающих...
робот, опорная поверхность, машина, конечность, система управления, EMICAB, сложный рельеф, обеспечение движения, шагающая машина, движение.
Исследования ветроколес с вертикальной осью вращения
Это позволяет отказаться от мощной, а следовательно, как правило, и многоступенчатой, угловой передачи крутящего момента, что
узлы, опорное основание и мачту колебательной составляющей, на лопасти ветроколеса и обеспечение плавной сбалансированной работы...
Основное рабочее оборудование самоходного стрелового крана
Число итераций (комбинаций) — 9; Угловая координата стрелы с приращением (αс +dαс) = 69.0 + 2.9. Павлов В.П. Анализ расчетных положений рабочего оборудования экскаватора в среде...
Экспериментальное определение угловой поперечной жёсткости...
— декартовы координаты точки A платформы (лежит на оси симметрии). При этом в качестве входной величины принимается угловая скорость ротора двигателя, приведенная к выходному валу... Определение взаимосвязи сносов реакций опорной поверхности...
Алгоритм управления шагающего робота при диагностике...
Рис. 3. Координаты шагающего робота.
робот, опорная поверхность, машина, конечность, система управления, EMICAB, сложный рельеф, обеспечение движения, шагающая машина, движение.
Анализ условий устойчивости стационарного движения редуктора
Определение взаимосвязи сносов реакций опорной поверхности... При движении колеса, в зависимости от величины и знака момента, действующего на
Для колеса вращающегося вокруг оси симметрии направление вектора совпадает с направлением вектора угловой скорости.
Улучшение устойчивости транспортного средства с повышенным...
Определение взаимосвязи сносов реакций опорной поверхности...
Ключевые слова: ESP, датчик, безопасность, курсовая устойчивость.
Ключевые слова:эксперимент, определение, угловая поперечная жёсткость,подвеска, автомобиль.
Программно-аппаратный комплекс для измерения угловой...
Контроль координат асинхронных электроприводов может осуществляется как устройствами с датчиками, так и устройствами без датчиков скорости.
Анализ устойчивости замкнутой нелинейной системы... где — угловая скорость двигателя; — электромагнитный момент...
Анализ повреждений рулевого управления современного легкового...
Принцип работы системы курсовой устойчивости автомобиля.
Экспериментальное определение угловой поперечной жёсткости...
Эти силы могут быть созданы путем колебаний опорной поворотной площадки стенда вокруг ее...




