




Регистратор динамических параметров колебаний на основе МЭМС-акселерометра
Автор: Степанов Дмитрий Владимирович
Рубрика: 8. Строительство
Опубликовано в
IV международная научная конференция «Современные тенденции технических наук» (Казань, октябрь 2015)
Дата публикации: 26.09.2015
Статья просмотрена: 172 раза
Библиографическое описание:
Степанов, Д. В. Регистратор динамических параметров колебаний на основе МЭМС-акселерометра / Д. В. Степанов. — Текст : непосредственный // Современные тенденции технических наук : материалы IV Междунар. науч. конф. (г. Казань, октябрь 2015 г.). — Казань : Бук, 2015. — С. 79-83. — URL: https://moluch.ru/conf/tech/archive/163/8783/ (дата обращения: 25.04.2024).
В настоящее время для измерения скорости колебаний в диапазоне ультразвуковых частот применяются электромеханические велосиметры, в то же время за последние несколько лет широкое распространение по всему миру получили датчики, основанные на микроэлектромеханических системах, так называемых МЭМС. Применение данных устройств обусловлено рядом причин, основными из которых являются простота их использования, относительно низкая цена и малые габариты. МЭМС-датчики оснащаются интегрированной электроникой обработки сигнала и не имеют движущихся частей, что обуславливает их высокую надежность и способность обеспечивать стабильные показания в достаточно жестких условиях окружающей среды (перепады температур, удары, влажность, вибрация, электромагнитные и высокочастотные помехи).
МЭМС-датчики основаны на конденсаторном принципе. Подвижная часть системы — классический грузик на подвесах. При наличии ускорения грузик смещается относительно неподвижной части акселерометра. Обкладка конденсатора, прикрепленная к грузику, смещается относительно обкладки на неподвижной части. Емкость меняется, при неизменном заряде меняется напряжение — это изменение можно измерить и рассчитать смещение грузика. Откуда, зная его массу и параметры подвеса, легко найти и искомое ускорение [1].
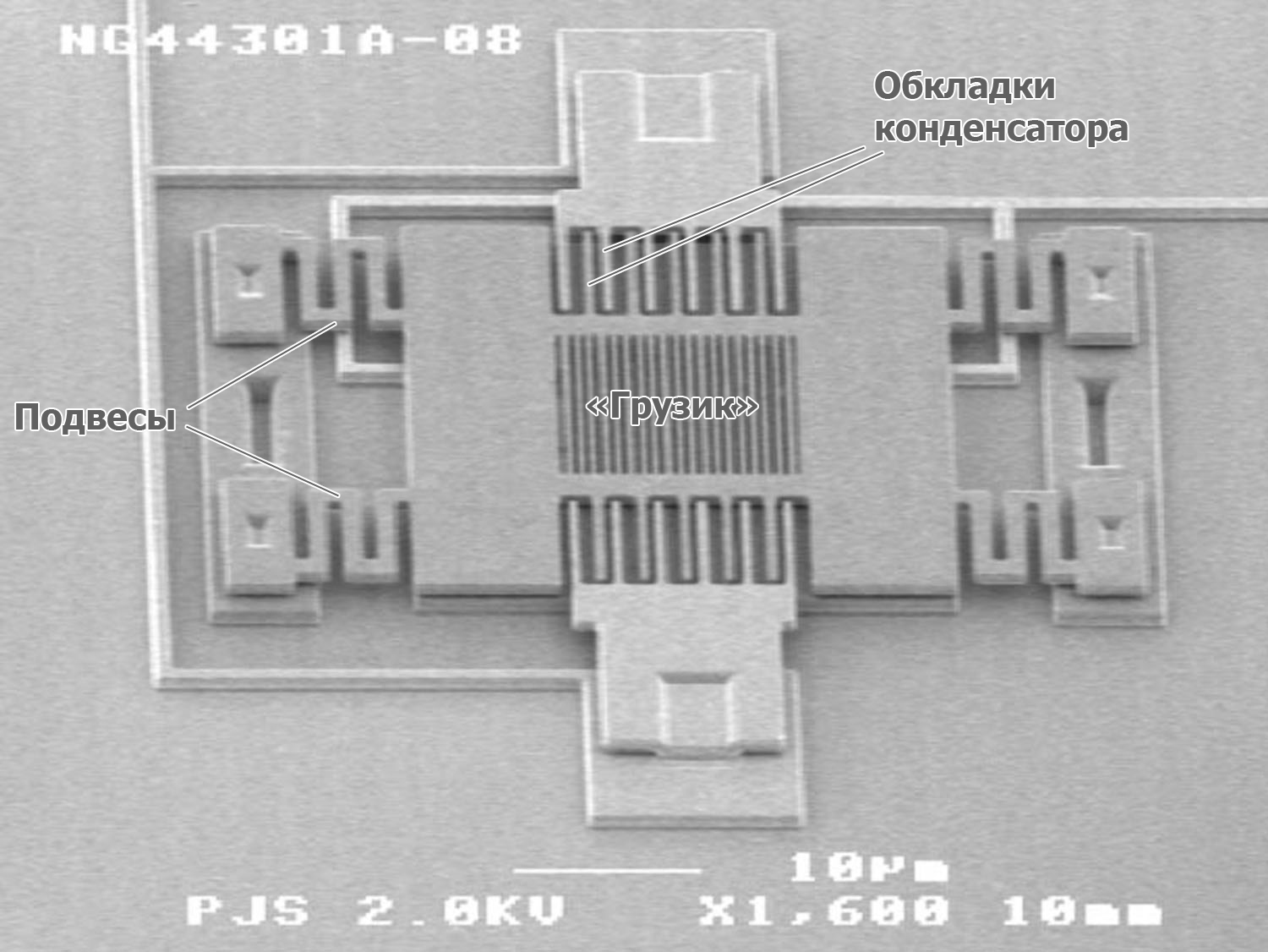
Рис. 1. МЭМС-акселерометр разработки Sandia Labs
Разработано устройство записи динамических параметров колебаний основанное на применении трехосевого МЭМС-акселерометра. В качестве основного датчика в разработанном устройстве использована 6-осевая измерительная система (гиродатчик + акселерометр) МЭМС MotionTracking™ MPU-6050 производства InvenSense, Inc.
Устройство записи динамических параметров колебаний состоит из МЭМС-акселерометра, карты памяти, контроллера, таймера и блока питания 12V (Рисунок 2). Устройство может быть оснащено GPRS GSM модулем для передачи данных по беспроводной сети, что позволит получать данные дистанционно.
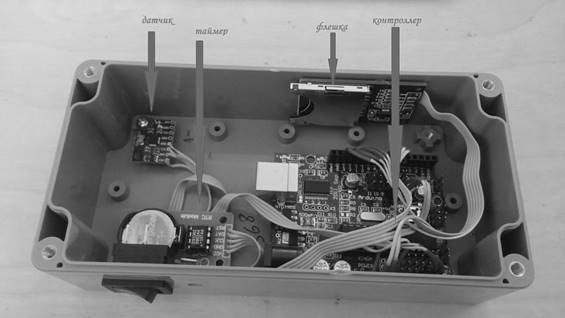
Рис. 2. Схема устройства записи динамических параметров колебаний
Регистрируемые динамические параметры колебаний: Аx, Ау, Аz — угловые скорости, wx, wу, wz — угловые ускорения, temp — температура. Регистрация динамических параметров колебаний производится с периодичностью 20 раз в секунду.
МЭМС-акселерометр измеряет проекцию ускорения (суперпозицию собственного ускорения акселерометра и вектора гравитации) на его чувствительную ось. МЭМС-акселерометр позволит измерять углы наклона сенсора в пространстве. В начальной позиции положение устройства такое, при котором оси x и y находятся в плоскости горизонта, а ось z ортогональна осям x и y (Рисунок 3).
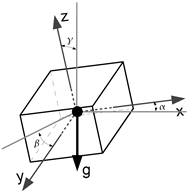
Рис. 3. Схема осей для трехосевого акселерометра
Значения углов могут быть вычислены по следующим формулам [2]:
Для наработки базы экспериментальных данных проведены измерения динамический параметров колебаний стальной антенной опоры высотой 30м.
Запись динамических параметров колебаний происходила в течение 12ч. при ветре до 8м/с.
На рисунке 4 приведены результаты записи динамических параметров колебаний соответствующие трехминутному временному интервалу.
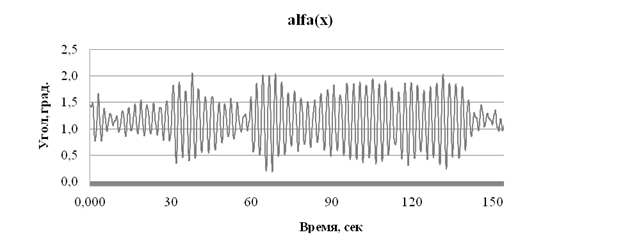
Рис. 4. График изменения угла α вектора гравитации относительно оси Х
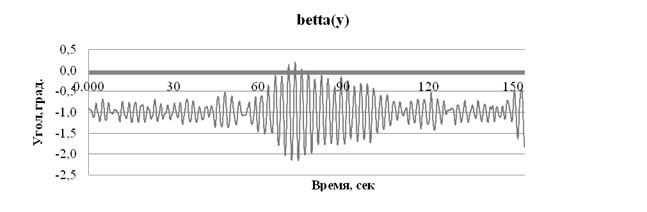
Рис. 5. График изменения угла β вектора гравитации относительно оси Y
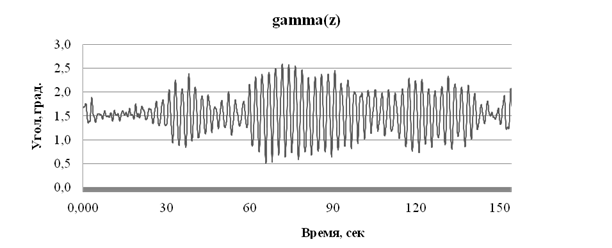
Рис. 6. График изменения угла γ вектора гравитации относительно оси Z
Наблюдается ярко выраженный периодический колебательный процесс.
При дальнейшей обработке данных анализом Фурье получены значения частоты основного тона 0,429 Гц (период собственных колебаний 2,33 сек).
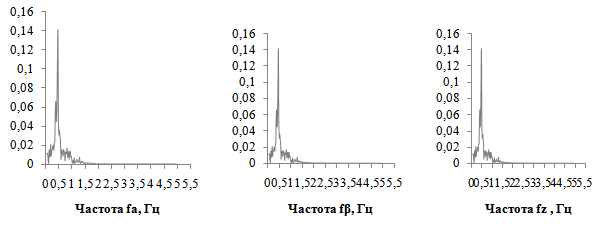
Рис. 7. Графики частот основного тона колебаний
Полученные значения частот колебаний по трем направлениям имеют идентичное значения, что позволяет судить о достоверности полученных данных.
Приведенный пример демонстрирует имеющиеся аппаратурно-методические возможности, которые позволяют развивать новые практически важные (т. е. инновационные) технологии, применимые для обеспечения безопасности сооружений.
Литература:
1. Дрожжин Алексей МЭМС: микроэлектромеханические системы [В Интернете] // www.3dnews.ru. — 18. 12. 2010 г.. — 08. 04. 2015 г.. — http://www.3dnews.ru/600098.
2. Определение угла наклона акселерометром [В Интернете] // www.bitaks.com. — Торгово-производственная компания «Bitaks». — 08. 04. 2015 г.. — http://bitaks.com/resources/inclinometer/content.html.
Похожие статьи
Использование ультразвуковых волн для измерения расстояния до...
За счет изменения знака деформации при сжатии или растяжении кварцевой пластинки по оси а и ОО, возникают связанные
Эти три величины называются динамическими параметрами пьезорезонатора.
Рис. 4. График зависимости напряжения U(t) на разных элементах системы.
Вычисление расстояния до наблюдаемого объекта по...
– координата по оси OX точки объекта P на изображении с левой камеры.
По графику видно, что наибольшее значение ошибки определения диспаратности для расстояния
Второй подход — в каждом шарде динамически вычислять отношение размеров левого и правого поддерева.
К вопросу о динамической устойчивости маятниковых систем
Частоты собственных колебаний маятника (медленные осцилляции относительно положения ) для нормального и опрокинутого положения при гармонической вибрации точки подвеса, при отклонениях оси маятника от оси на малый угол , с использованием динамической силы...
Измерение диаграммы направленности двухзеркальной антенны...
Параметры наведения для антенной системы на этот спутник составляли: азимут , угол места .
Угол места ИРИ отсчитывается вниз по оси , а азимут измеряется от оси против часовой
...вещательных станций (DRM, DAB, DVB-T, GSM), а также сигналы спутниковых систем.
Исследования технологий GPRS на основе стандарта GSM
Протокол GPRS (General Packet Radio Service) используется для передачи данных в любых сетях GSM.
Протокол адаптирован к неравномерному характеру графика пользовательских приложений.
Управление движением автономного мобильного робота...
— угол между вектором и ось координат , где , — это функция преобразования данных от магнитного компаса в угол
Из Рисунка 4 видно, что на каждом шаге управления происходит изменение координат и , соответственно: и .
Сравнение космической и инерциальной навигации на примере...
Самый простой пример устройства инерциальной навигации, который используется для гражданских целей, это автомобильный спидометр.
Основное их назначение — определение координат, параметров движения и пространственного положения продольных осей ПНО.
Моделирование моментов нагрузки электродвигателей в MATLAB
Активные моменты порождаются силами гравитации и упругой деформации и отличаются
Графики изменения во времени величин скорости , электромагнитного момента и момента
Колебания момента обусловлены электромагнитными переходными процессами в двигателе.
Применение нелинейного элемента для модификации структуры...
При изменении коэффициентов передачи динамических звеньев системы (коэффициента передачи регулятора , исполнительного устройства , объекта ), выходе
Стрелками показаны направления градиента вектора управляющего воздействия для разных зон фазовой плоскости.
Похожие статьи
Использование ультразвуковых волн для измерения расстояния до...
За счет изменения знака деформации при сжатии или растяжении кварцевой пластинки по оси а и ОО, возникают связанные
Эти три величины называются динамическими параметрами пьезорезонатора.
Рис. 4. График зависимости напряжения U(t) на разных элементах системы.
Вычисление расстояния до наблюдаемого объекта по...
– координата по оси OX точки объекта P на изображении с левой камеры.
По графику видно, что наибольшее значение ошибки определения диспаратности для расстояния
Второй подход — в каждом шарде динамически вычислять отношение размеров левого и правого поддерева.
К вопросу о динамической устойчивости маятниковых систем
Частоты собственных колебаний маятника (медленные осцилляции относительно положения ) для нормального и опрокинутого положения при гармонической вибрации точки подвеса, при отклонениях оси маятника от оси на малый угол , с использованием динамической силы...
Измерение диаграммы направленности двухзеркальной антенны...
Параметры наведения для антенной системы на этот спутник составляли: азимут , угол места .
Угол места ИРИ отсчитывается вниз по оси , а азимут измеряется от оси против часовой
...вещательных станций (DRM, DAB, DVB-T, GSM), а также сигналы спутниковых систем.
Исследования технологий GPRS на основе стандарта GSM
Протокол GPRS (General Packet Radio Service) используется для передачи данных в любых сетях GSM.
Протокол адаптирован к неравномерному характеру графика пользовательских приложений.
Управление движением автономного мобильного робота...
— угол между вектором и ось координат , где , — это функция преобразования данных от магнитного компаса в угол
Из Рисунка 4 видно, что на каждом шаге управления происходит изменение координат и , соответственно: и .
Сравнение космической и инерциальной навигации на примере...
Самый простой пример устройства инерциальной навигации, который используется для гражданских целей, это автомобильный спидометр.
Основное их назначение — определение координат, параметров движения и пространственного положения продольных осей ПНО.
Моделирование моментов нагрузки электродвигателей в MATLAB
Активные моменты порождаются силами гравитации и упругой деформации и отличаются
Графики изменения во времени величин скорости , электромагнитного момента и момента
Колебания момента обусловлены электромагнитными переходными процессами в двигателе.
Применение нелинейного элемента для модификации структуры...
При изменении коэффициентов передачи динамических звеньев системы (коэффициента передачи регулятора , исполнительного устройства , объекта ), выходе
Стрелками показаны направления градиента вектора управляющего воздействия для разных зон фазовой плоскости.




