Сравнительно широкое использование гидропривода (около 30 % в робототехнике) [6] обусловлено рядом достоинств:
- высокое быстродействие;
- бесступенчатость регулирования скорости выходного звена;
- большой коэффициент усиления по мощности (более 1000), высокий коэффициент полезного действия при различных способах регулирования;
- малая относительная масса гидромашин;
- отсутствие дополнительных кинематических цепей между выходным звеном привода и рабочим органом.
К основным недостаткам гидравлических приводов следует отнести:
- использование в качестве рабочего тела жидкости требует создания специальных насосных установок, что резко увеличивает массу конструкции;
- ресурс рабочей жидкости ограничен, что приводит к частой смене всего объема жидкости, который в насосной установке достигает значительной величины. Это приводит к увеличению стоимости обслуживания;
- стоимость элементов данного привода выше, чем элементов пневматического и электрического приводов.
Характерные условия эксплуатации стенда:
- приводные узлы стенда монтируются в боковых стенках осмотровой канавы в ограниченном пространстве;
- требуется точное позиционирование;
- применение электропривода в условиях осмотровой канавы недопустимо.
В этих условиях наиболее эффективно применение гидравлического привода. [8]
В отечественной и зарубежной промышленности при небольших частотах вращения выходного звена нашли применение поршневые гидродвигатели с передаточными механизмами, преобразующими поступательное движение штока во вращательные выходного звена, следующих типов: реечными, рычажными, винтовыми и цепными. [6]
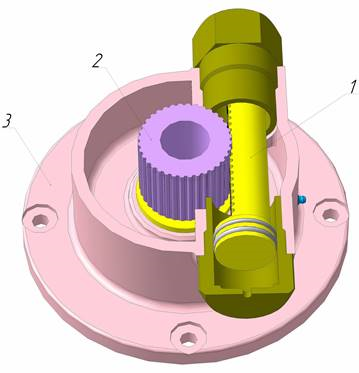
Рис. 1. Поворотный гидродвигатель
На рисунке 1 представлена конструкция поворотного гидродвигателя типа ГДП, который состоит из 2 гидроцилиндров с рейкой 1 на штоке, находящейся в зацеплении с зубчатым колесом 2, установленным в блоке 3. Вращение колеса 2 осуществляется при подаче рабочей жидкости в поршневые полости. Для увеличения крутящего момента иногда проектируют привод со сдвоенным поршневым приводом. [6]
Гидравлический поворотный двигатель (привод) состоит из двух основных узлов: реечной передачи и гидроцилиндра, (рис.1).
При расчете принимаем:
|
Номинальное давление рабочей жидкости в гидросети, МПа |
6,0...8,0; |
|
Расчетный крутящий момент при номинальном давлении, Нм |
220; |
|
Частота вращения выходного вала, мин-1. |
0,5...2,0; |
|
Угол поворота выходного вала, град. |
±50. |
Рассчитываемая передача относится к реечному зацеплению, выполненному в виде самостоятельного агрегата, поэтому основные ее параметры должны соответствовать ГОСТ 2185–66. [1]
Расчет на прочность зубьев открытой реечной передачи производим на изгиб и контактную прочность. Основным расчетом зубьев этих передач является расчет их на изгиб с последующей проверкой на контактную прочность. При проектном расчете на изгиб зубьев открытых передач определяют требуемую величину модуля. Так как передаточное отношение i=1, материал зубьев шестерни и рейки примем одинаковый, и расчет достаточно выполнить для зубьев шестерни. [4]
Для изготовления зубчатого колеса и рейки принимаем сталь 35Х с закалкой и отпуском в масле; механические свойства этой стали (ГОСТ 4543–71): предел прочности при растяжении σв = 93 кгс/мм2 = 93*107 Па, предел текучести σт = 75 кгс/мм2 = 735*106 Па, твердость НВ = 200. [7]
Допускаемое контактное напряжение для зубьев колеса: [σк] = 26*НВ = 26*200 = 5200 кгс/мм2 = 52*107 Па.
Допускаемое напряжение на изгиб [σи] для зубьев длительно работающих передач с постоянным режимом нагрузки и при работе зубьев двумя сторонами (напряжения изменяются по симметричному циклу) определяется по формуле:
 , Па, (1)
, Па, (1)
где σ-1 — предел выносливости материала зубьев при симметричном цикле изгиба, Па;
[n] — допускаемый коэффициент запаса прочности, зависящий от материала колес, вида заготовки и термообработки;
kσ — эффективный коэффициент концентрации напряжений у корня зуба.
Примем допускаемый коэффициент запаса прочности [n]=1,5 [2] и коэффициент концентрации напряжений у корня зуба для стальных нормализованных или улучшенных зубчатых колес kσ = 1,8 [7].
Предел выносливости материала зубьев σ-1 определяем по формуле:
 ; (2)
; (2)
 Па.
Па.
 Па.
Па.
Для зубьев рассчитываемой передачи предусматриваем стандартное эвольвентное зацепление.
Определяем модуль зубьев шестерни по формуле:
 , м, (3)
, м, (3)
где m — модуль зубчатого колеса;
Y = 0,517 — коэффициент формы зуба. При Z = 35 и коэффициенте смещения исходного контура х = 0 [4];
Кк = 1,0 — коэффициент концентрации нагрузки, учитывающий неравномерное распределение нагрузки по длине зубьев [2];
Кд = 1,2 — коэффициент динамической нагрузки. При степени точности передачи 7 и окружной скорости от 1 до 3 м/сек. [2];
М — момент на валу шестерни;
Ψm = 20 — коэффициент ширины венца зуба по модулю [2];
z — число зубьев шестерни. Из конструктивных соображений принимаем z=35.
[σ]и — допускаемое напряжение изгиба материала шестерни, для стали 40Х с термообработкой закалка в масле и твердости 48 НRС [σ]и = 320 МПа [2].
М = Р*К = 3700* 60*10–3 = 220 Н*м

В соответствии с ГОСТ 9563–60 принимаем m = 2,0 [4].
Проверочный расчет на контактную прочность зубьев шестерни.
Условия контактной прочности зубьев:
 (4)
(4)
где σпр — допускаемое контактное напряжение.

 , Па, (5)
, Па, (5)
где ρпр — приведенный радиус кривизны, ρпр = 0,5;
ωо — удельная расчетная нормальная сила;
α = 20°- угол зацепления.
ρпр=0,5*10*0,342=1,71
 , (6)
, (6)
где ωα — удельная расчетная нормальная сила;
ω — удельная расчетная окружная сила.
 , (7)
, (7)
где k — коэффициент неравномерности распределения нагрузки k = 1,5;
b — ширина зубчатого венца b — 20 мм;
F — окружная сила, действующая на зуб шестерни.
Т. к.  , (8)
, (8)
то 

Таким образом, прочность реечного зацепления по контактным напряжениям обеспечена.
Определение параметров шестерни.
Определяем размеры зубьев шестерни.
В соответствии с ГОСТ 13755–68 принимаем коэффициент высоты головок зубьев h*a= 1 и коэффициент радиального зазора с* = 0,25. [7]
Высота головок зубьев определяется по формуле:
 мм, (9)
мм, (9)
высота ножек зубьев — по формуле:
 мм, (10)
мм, (10)
высота зубьев: h=ha+hf, мм (11)
ha=1*2=2 мм;
hf=(1+0,25)*2=2,5 мм.
Высота зубьев:
Определяем для шестерни делительный диаметр  , диаметр вершин
, диаметр вершин  и диаметр впадин
и диаметр впадин  :
:
 (12)
(12)
 (13)
(13)
 (14)
(14)
Расчетный диаметр гидроцилиндра определяется по формуле:
 , (15)
, (15)
где Р — окружное усилие на делительном диаметре шестерни реечного зацепления, Р = 3700Н;
 — давление в магистрали или на выходе редукционного клапана;
— давление в магистрали или на выходе редукционного клапана;
= 6,0–8,0 МПа;
 — коэффициент, учитывающий потери на трение в цилиндре. Ориентировочные значения при уплотнении манжетами по ГОСТ 6678–72 и магистральном давлении 6,0–8,0 МПа, = 0,05÷0,2 в зависимости от обеспечения смазкой. Принимаем = 0,15. [3]
— коэффициент, учитывающий потери на трение в цилиндре. Ориентировочные значения при уплотнении манжетами по ГОСТ 6678–72 и магистральном давлении 6,0–8,0 МПа, = 0,05÷0,2 в зависимости от обеспечения смазкой. Принимаем = 0,15. [3]
 .
.
Расчетное значение диаметра поршня округляется до ближайшего по ГОСТ 6540–68 значения. Рекомендуется округлять в большую сторону, однако, если расчетный диаметр поршня отличается от стандартного не более чем на 5 %, то можно принимать меньшее значение. Поэтому принимаем следующее значение диаметра поршня,  =50мм. [3]
=50мм. [3]
Ход поршня определяется требуемым перемещением рабочего органа. По принятым условиям угол поворота выходного вала 100 град., следовательно, шестерня привода должна совершить 0,27 оборота. Тогда минимальный ход поршня h должен быть  . Принимаем ход поршня h = 63мм.
. Принимаем ход поршня h = 63мм.
Максимальное значение хода гидроцилиндров двухстороннего действия рекомендуется ограничивать 8–10 диаметрами поршня. При ходе превышающем десять диаметров поршня необходимо рассчитывать шток на устойчивость. Проверим это условие:
 Устойчивость штока обеспечена.
Устойчивость штока обеспечена.
По ГОСТ 6540–64 при диаметре поршня D=50мм шток имеет диаметр Dш=28мм. Так как на части штока нарезаются зубья, образуя рейку, из конструктивных соображений принимаем Dш=45мм. Конструкция оригинального цилиндра приведена на рисунке 3.4. В этой конструкции могут быть использованы нормализованные детали гидроцилиндра по ГОСТ 6540–64, кроме оригинального штока. [3]
Для комплектования принимаем гидроцилиндр ЦРГ 31–50x28–200 [3] со следующей характеристикой:
- давление, МПа: номинальное — 16; максимальное — 20;
- коэффициент полезного действия (механический) — 0,96;
- диаметр поршня, мм — 50;
- диаметр штока, мм — 40;
- ход поршня, мм — 200.
Минимально допустимая толщина стенки гидроцилиндра определяется по формуле:
 (16)
(16)
где [σр] — допускаемое напряжение на растяжение, Па.
Для стали 20Х [σр] = 115 * 106 Па; [2]
μ- коэффициент Пуассона, для стали μ = 0,26. [2]

Принимаем конструктивно tц= 0,005м = 5мм.
Толщина плоского донышка гидроцилиндра определяется по формуле:
 , м (17)
, м (17)

Принимаем толщину дна гидроцилиндра tд = 5мм.
Рассчитанные параметры соответствуют выбранному ранее гидроцилиндру ЦРГ З1–50x28–200.
Органолептическая проверка люфтов в шарнирных соединениях рулевого привода и реактивных тяг требует приложения знакопеременных сил к деталям рулевого привода. Эти силы могут быть созданы путем колебаний опорной поворотной площадки стенда вокруг ее вертикальной оси с амплитудой 2–5°.
Существующий механический привод, например, кривошипно-шатунный, преобразует вращательное движение в возвратно-поступательное или колебательное по синусоидальному закону изменения скорости, что не позволяет создавать ударные нагрузки, при которых наиболее эффективно проявляются люфты в шарнирных соединениях.
Рациональный привод поворотной площадки стенда должен удовлетворять следующим требованиям:
- закон изменения скорости должен быть трапециевидным;
- частота колебаний должна быть регулируемой и изменяться бесступенчато;
- безотказный пуск и надежная работа как под нагрузкой, так и в режиме холостого хода;
- привод должен иметь минимальные габариты и металлоемкость.
Выполнение сформулированных требований в наибольшей мере обеспечивается гидравлическим объемным приводом.
Отечественной промышленностью разработан и освоен выпуск гидроприводов с возвратно-поступательным движением (ГДВПД), которые преобразуют энергию гидравлического потока жидкости непосредственно в возвратно-поступательное движение исполнительного органа. Характерной особенностью этих приводов является трапециевидное распределение скорости перемещения. Это гидродвигатели:
ДГ-30 с рабочим ходом 30мм,
ДГ-50 с рабочим ходом 50мм,
ДГ-76 с рабочим ходом 76мм,
ДГ-90 с рабочим ходом 90мм.
Приняв конструктивно радиус приложения возмущающей силы R= 150мм и амплитуду колебаний 3°, выбираем гидродвигатель ДГ-30 с рабочим ходом 30мм.
Технические данные гидродвигателя ДГ-30:
- диаметр поршня, мм — 32;
- диаметр штока, мм — 20;
- усилие на штоке при номинальном давлении 100 кг/см2–539;
- расход рабочей жидкости, см3 /цикл — 29,4;
- рабочий ход, мм — 30;
- гидромеханический КПД — 0,85;
- масса, кг- 11.
Гидродвигатель разработан по инициативе ВНИИВиВ г. Новочеркасска и применяется на машине ЧВЛ-1 для чеканки виноградной лозы в шпалерах. [6]
Гидравлическая схема управления приводами приведена на рисунке 2.
Гидравлическая система стенда сблокирована с гидравлической системой канавного подъемника мод. П201М с целью использования насосной станции подъемника.
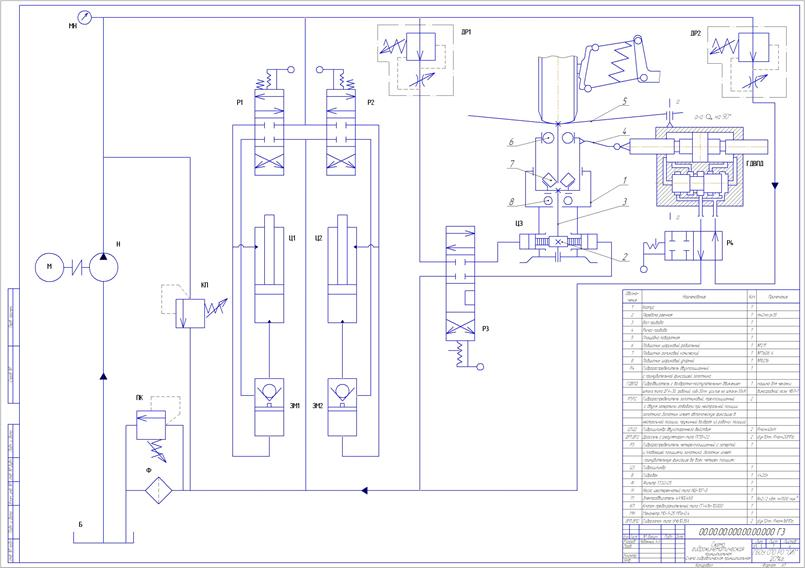
Рис. 2. Гидравлическая схема управления приводами
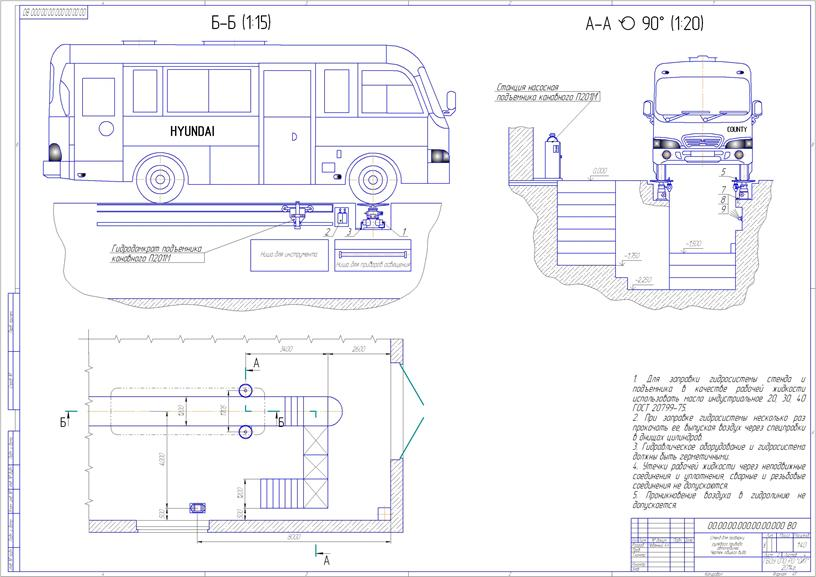
Рис. 3. Чертеж общего вида стенда для проверки рулевого привода автомобилей
На рисунке 3 выполнен чертеж общего вида стенда для проверки рулевого привода автомобилей.
Опираясь на стандарты ЕСКД [9], с использованием графических редакторов на персональных ЭВМ [5] выполнено геометрическое моделирование чертежей деталей и сборочных единиц конструкторской разработки.
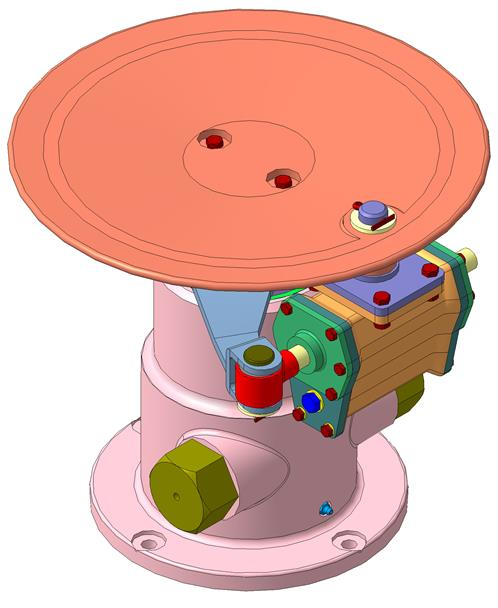
Рис. 4. Трехмерная твердотельная модель привода стенда для проверки рулевого управления автомобилей
С помощью программного обеспечения КОМПАС — 3D V12 [5] была создана трехмерная твердотельная модель привода стенда, представленная на рисунке 4.
Литература:
1. Анурьев, В. И. Справочник конструктора-машиностроителя / В. И. Анурьев.– 6-е изд. — Москва: Машиностроение, 2001. — Т. 1. — 728 с.
2. Анурьев, В. И. Справочник конструктора-машиностроителя / В. И. Анурьев.– 6-е изд. — Москва: Машиностроение, 2001. — Т. 2. — 584 с.
3. Анурьев, В. И. Справочник конструктора-машиностроителя / В. И. Анурьев.– 6-е изд. — Москва: Машиностроение, 2001. — Т. 3. — 576 с.
4. Курсовое проектирование деталей машин: учебное пособие / С. А. Чернавский, К. Н. Боков, И. М. Чернин, Г. М. Ицкович, В. П. Козинцов. — 3-е изд, стереотипное. Перепечатка с издания 1987 г. — Москва: ООО ТИД «Альянс», 2005. — 416 с.
5. Компас-3D. Проектирование и расчет механических систем / Е. М. Кудрявцев. — Москва: ДМК пресс, 2008. — 400 с.
6. Ловкис, З. В. Гидроприводы сельскохозяйственной техники: конструкция и расчет / З. В. Ловкис. — Москва: Агроромиздат. 1990. — 239 с.
7. Проектирование механических передач: учебно-справочное пособие для ВТУЗов / С. А. Чернавский, Г. А. Снегарев, Б. С. Козинцов и др. — 6-е изд. перераб. и доп. — Москва: «Альянс», 2008. — 560 с.
8. Филатов,С. К. Методические указания к выполнению курсовой работы по дисциплине «Основы проектирования и эксплуатации технологического оборудования» / С. К. Филатов, В. Н. Щиров, Д. Н. Безменников. — Зерноград: ФГОУ ВПО АЧГАА, 2008. — 33 с.
9. Яламов, В. Ф. Инженерная графика: учебное пособие / В. Ф. Яламов. — 2-е изд., испр. — Зерноград: АЧГАА, 2001. — 144 с.

