




Сельскохозяйственный робот для посадки семян
Авторы: Петров Алексей Михайлович, Турышев Иван Васильевич, Семейкин Артем Сергеевич
Рубрика: 2. Электроника, радиотехника и связь
Опубликовано в
IV международная научная конференция «Технические науки в России и за рубежом» (Москва, январь 2015)
Дата публикации: 05.01.2015
Статья просмотрена: 910 раз
Библиографическое описание:
Петров, А. М. Сельскохозяйственный робот для посадки семян / А. М. Петров, И. В. Турышев, А. С. Семейкин. — Текст : непосредственный // Технические науки в России и за рубежом : материалы IV Междунар. науч. конф. (г. Москва, январь 2015 г.). — Москва : Буки-Веди, 2015. — С. 23-26. — URL: https://moluch.ru/conf/tech/archive/124/7065/ (дата обращения: 24.04.2024).
В статье рассматривается возможность роботизации технологического процесса посадки семян, с привлечением техники минимальных размеров и без прямого участия человека.
Ключевые слова: сельское хозяйство, сельскохозяйственный робот, робототехника, управление, оптимизация.
Каждый год на развитие рынка робототехники выделяется 5–6 миллиардов долларов, и эта цифра постоянно растет. Видимо, век накопления знаний и теоретической науки сменяется новой эпохой — когда всевозможные роботы и механизмы заполняют мир.
По последним данным, сегодня в мире работают 1,8 млн. самых различных роботов — промышленных, домашних, роботов-игрушек [1].
Робот — это электромеханическое, пневматическое, гидравлическое устройство, программа, либо их комбинация, работающая без участия человека и выполняющие действия, обычно осуществляемые человеком. Роботы могут быть применимы и применяются во всех сферах человеческой деятельности, в том числе и в сельском хозяйстве. Поэтому, преследуемая авторами цель заключается в сборке мобильного, сельскохозяйственного робота, функцией которого была бы посадка семян на небольшой площади.
Для осуществления данной цели, необходимо пройти ряд этапов, которые нужно пройти при проектировании любого робота [2]. Первым этапом является процедура планирования сельскохозяйственного робота.
Организация процедуры планирования и координации является чрезвычайно важной для робота, так как она оказывает существенное влияние на используемые методы управления.
Этот метод организации предполагает наличие центральной системы управления, которая планирует действия всех подсистем и затем координирует их взаимодействие в процессе исполнения в соответствии с предварительно разработанным планом. Центральная система управления (ЦСУ) передает подсистеме задание, исполнение которого не требует какой-либо координации между подсистемами. Результат исполнения возвращается в ЦСУ. В зависимости от присланного результата ЦСУ посылает подсистеме следующее задание, и далее процесс повторяется. Заметим, что физически ЦСУ может быть реализована либо как отдельное устройство, либо на базе системы управления одной из компонент МРС [3].
Наиболее оптимальным, учитывая поставленные нами задачи является распределенный способ управления. При таком способе организации управления отсутствует центральная система, и процессы планирования заданий и координация в процессе исполнения реализуются путем обмена сообщениями между подсистемами (рис. 1). На этапе планирования осуществляется переговорный процесс, результатом которого является согласованный план исполнения задания. Реализация этого плана происходит на этапе исполнения и состоит в выполнении подзаданий и обмене результатами их исполнения. Строго говоря, при такой организации нельзя говорить об управлении распределенной системой, поскольку, в отличие от централизованной организации, отсутствует явно выраженный носитель управления, обеспечивающий требуемое поведение системы: все подсистемы являются равноправными как на этапе планирования, так на этапе исполнения.
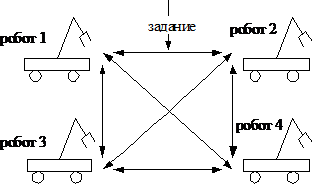
Рис. 1. Системы управления роботами
Таким образом, управление реализует иерархический способ организации системы, состоящий в частности в том, что управление является многоуровневым с явным подчинением нижних уровней (локальных систем управления) верхним. Все обмены сообщениями между подсистемами происходит не напрямую, а через верхний уровень. Распределенное управление реализует гетерархический способ организации, когда все компоненты системы равноправны и процесс планирования осуществляется параллельно всеми подсистемами.
Вторым этапом при проектировании робота является выбор архитектуры построения его «электронной начинки».
Архитектура каждой компоненты МРС (мобильной роботизированной системы) обусловлена тем набором функций, которые она должна выполнять, а именно [4]:
F1 — иметь возможность обмениваться данными либо с центральной системой управления (для централизованного способа управления), либо с локальными подсистемами (для распределенного способа).
F2 — обеспечивать процесс принятия решения или планирования (для децентрализованного управления).
F3 — обеспечить координацию с другими подсистемами на этапе исполнения спланированного задания,
F4 — исполнять соответствующие подзадания, сформированные на этапе планирования.
Функция F1 является, вообще говоря, чисто технической и ее реализация состоит в поддержке соответствующих сетевых протоколов. Обеспечение функции F2 состоит в требовании иметь в составе подсистемы базу знаний для принятия решений. Функция F3 требует наличия механизма, приводящего в действие исполнение системой соответствующих подзаданий по сигналам, поступающим от других подсистем. При этом эти сигналы не должны требовать перепланирования задания в целом (например, неуспех при выполнении подзадания одной из подсистем). Выполнение функции F4 обеспечивается нижним уровнем локальной системы управления и аппаратными средствами подсистем.
Заметим, что если локальная система является сложной в смысле введенного определения, то процесс исполнения подзадания также может включать в себя этапы планирования и координации исполнения. Например, для мобильного робота, включающего в свой состав шасси, манипулятор и систему технического зрения, подзадание в форме «переместить объект А в позицию В» может быть распланировано следующим образом: t1 — манипулятор, убрать; t2 — TV, найти А; t3 — манипулятор, сменить схват; t4 — манипулятор, взять А; t5 — манипулятор, положить в В; с соответствующей координацией между подсистемами «манипулятор» и «TV» в процессе исполнения.
Таким образом, подсистема должна включать по крайней мере следующие 4 функционально различные компоненты (2):
коммуникатор (F1);
планировщик (F2);
координатор (F3);
исполнитель (F4).
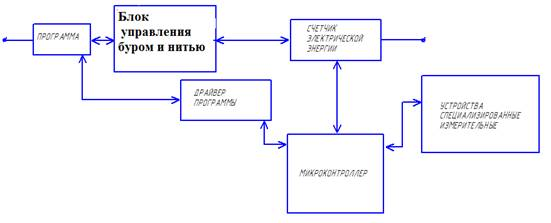
Рис. 2. Функциональная схема сельскохозяйственного робота для посадки семян
Построение процессора, являющегося основным управляющим устройством робота, можно осуществить по схеме, указанной на рисунке 2. Данная схема учитывает наличие всех необходимых радиоэлементов, преобразователей одного вида сигнала в другой, наличие контролирующих органов натяжения нити, глубины пропашки бура, и тому подобное [5].
Для подведения необходимой математической базы проектируемого робота, воспользуемся методикой расчета, взятых из книг по робототехнике и роботизации процессов. Поскольку, только грамотный подбор и расчет основных параметров может быть реализован в работающем образце на практике. За основу расчетов был взят наиболее приближенный по смыслу конструкции, и функциональности военный робот-сапер [6].
После завершения основных вычислений по конструктивному исполнению, можно приступить к непосредственной сборки модели. Для этого необходимо обозначить сам принцип работы.
Принцип работы заключается в том, что сельскохозяйственный робот будет перемещаться, по некоей территории. Также робот будет снабжен специальным буром, к концу которого закреплена разлагающаяся в земле нить. В свою очередь, на нить с определенным шагом прикреплены семена. Таким образом, робот пробуривая землю до определенной глубины, будет размещать в ней нить с семенами, затем идущее за нитью устройство, будет заравнивать проделанное углубление. В итоге, электронная «начинка» робота должна регулировать лишь глубину «пробурки» почвы, и скорость размещения нити в земле.
После разработки «электронной начинки» необходимо было приступить непосредственно к конструированию. Из имеющихся ресурсов были использованы:
1. Радиоуправляемая машина;
2. Металлические, конструкционные части;
3. Компактная дрель;
4. Капроновая нить;
5. Аккумуляторные батареи на 9 В;
6. Автоматический выключатель.
Устанавливая части в определенной последовательности, был разработан простейший вариант корпуса робота. Данная статья освещает научную работу, основной целью которой была заложена создание образца, который мог бы функционировать в экспериментальных условиях, где сымитированы основные элементы полевой системы. А именно наличие поверхности, на которой можно проложить ленту с семенами. Причем, в данном варианте конструкции робота питание основных рабочих органов, а именно мобильной и бурильной части питались от разных источников напряжения.
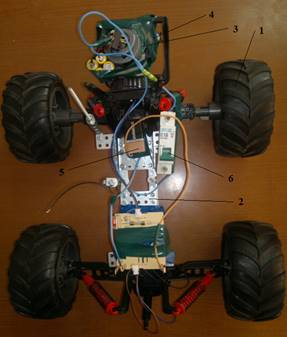
Рис. 3. Модель робота для посадки семян (вид сверху)
Из металлического конструктора была сделана основная рама, выдерживающая нагрузку источников питания, основных схем и бура с нитью, продлили антенну, тем самым усилив радиус принимающего сигнала. В настоящее время робот управляется с пульта оператором, но можно заменить оператора персональным компьютером, либо автоматической системой с беспроводной передачей данных.

Рис. 4. Модель робота для посадки семян (вид сбоку)
В итоге проделанной работы, освещаемой в статье, можно обозначить ряд выводов:
1. Произведен анализ существующих сельскохозяйственных роботов, который показал их неразвитость в аграрном секторе, тем самым, обозначив необходимость дальнейшего исследования;
2. Проведены теоретические исследования, и создана математическая база предварительной конструкции робота с электронно-вычислительной, электрической и непосредственно материально стороны. Таким образом были заданы основы конструкции и информационно-управленческих алгоритмов робота;
3. Разработан алгоритм оптимизации и управления агробота, а также электрическая схема процессора, являющаяся основным элементом управления поведения робота в момент исполнения его функциональных обязанностей;
4. Собрана действующая модель агробота, применимая для модельно-экспериментальных условий технологического процесса;
Литература:
1. Советов Б. Я., Яковлев С. А. «Робототехника». — М.: Высш. шк., 2005.- 271 с.
2. Методические указания к курсовой работе по дисциплине «Робототехника и мехатроника» для студентов специальности ГКСР ". 1999.
3. Погребной В. О., Рожанковский И. В., Юрченко Ю. П. Основы информационных процессов в роботизированном производстве;
4. Письменный Г. В., Солнцев В. И., Воротников С. А. Системы силомоментного очувствления роботов. М.: Машиностроение, 2000
5. Воротников С. А. Информационные устройства робототехнических систем. М.: Изд. МГТУ им. Н. Э.Баумана, 2005
6. Гориневский Д. М. Формальский А. М., Шнейдер А. Ю. Управление манипуляционными системами на основе информации об усилиях. М.:Изд.фирма «Физико-математическая литература», 2001;
Ключевые слова
оптимизация, управление, сельское хозяйство, оптимизация., робототехника, сельскохозяйственный роботПохожие статьи
Состояние и перспектива развития мехатронных систем...
сельскохозяйственный робот, подсистема, робот, этап планирования, процесс исполнения, посадка семян, центральная система управления, этап исполнения, сельское хозяйство, локальная система управления.
Робот в помощь сельскому хозяйству | Статья в журнале...
Сельскохозяйственный робот для посадки семян. Ключевые слова: сельское хозяйство, сельскохозяйственный робот, робототехника, управление, оптимизация.
Робот для исследования грунта в сельском хозяйстве
Ключевые слова: мобильные роботы, шагающие роботы, система управления шагающего робота. Внедрение роботов в эту индустрию позволит существенно
Состояние и перспектива развития мехатронных систем... Робот для исследования грунта в сельском хозяйстве.
Классификация роботов по использованию, передвижению...
Медицинский робот — робот, созданный для выполнения медицинских манипуляций под управлением человека.
Обзор и перспективы развития мобильных шагающих... Очевидно, что в состав системы управления должны входить устройства определения положения корпуса...
Роботизированная платформа для точного земледелия
— техническое: улучшается тайм-менеджмент на уровне хозяйства (в том числе, улучшается планирование сельскохозяйственных операций)
— Казанский государственный университет, 2005. Анализ и выбор систем навигации робота для...
Роботизирование сельского хозяйства | Статья в журнале...
сельское хозяйство, система, GPS, TEACH, алгоритм управления, базовый язык программирования, основная ЭВМ, высокий уровень.
Система планирования и оперативного управления...
Система планирования и оперативного управления использования машинно-тракторного парка на базе 1С технологии.
Еще большие сложности создает процесс сбора, анализа и систематизации статистических материалов из отчетных данных хозяйств.
Управление сельскохозяйственной организацией на основе...
На основании системы BSC был построен следующий алгоритм управления сельскохозяйственной организацией, основным видом деятельности которой является свинопроизводство. Он состоит из следующих восьми этапов
Экономико-математическое моделирование производственных...
Сельское хозяйство можно отнести к сложной экономической системе.
Множество ученых в сельскохозяйственных вузах занимаются разработкой и внедрением результатов экономико-математических методов в планирование и управление сельским хозяйством.
Похожие статьи
Состояние и перспектива развития мехатронных систем...
сельскохозяйственный робот, подсистема, робот, этап планирования, процесс исполнения, посадка семян, центральная система управления, этап исполнения, сельское хозяйство, локальная система управления.
Робот в помощь сельскому хозяйству | Статья в журнале...
Сельскохозяйственный робот для посадки семян. Ключевые слова: сельское хозяйство, сельскохозяйственный робот, робототехника, управление, оптимизация.
Робот для исследования грунта в сельском хозяйстве
Ключевые слова: мобильные роботы, шагающие роботы, система управления шагающего робота. Внедрение роботов в эту индустрию позволит существенно
Состояние и перспектива развития мехатронных систем... Робот для исследования грунта в сельском хозяйстве.
Классификация роботов по использованию, передвижению...
Медицинский робот — робот, созданный для выполнения медицинских манипуляций под управлением человека.
Обзор и перспективы развития мобильных шагающих... Очевидно, что в состав системы управления должны входить устройства определения положения корпуса...
Роботизированная платформа для точного земледелия
— техническое: улучшается тайм-менеджмент на уровне хозяйства (в том числе, улучшается планирование сельскохозяйственных операций)
— Казанский государственный университет, 2005. Анализ и выбор систем навигации робота для...
Роботизирование сельского хозяйства | Статья в журнале...
сельское хозяйство, система, GPS, TEACH, алгоритм управления, базовый язык программирования, основная ЭВМ, высокий уровень.
Система планирования и оперативного управления...
Система планирования и оперативного управления использования машинно-тракторного парка на базе 1С технологии.
Еще большие сложности создает процесс сбора, анализа и систематизации статистических материалов из отчетных данных хозяйств.
Управление сельскохозяйственной организацией на основе...
На основании системы BSC был построен следующий алгоритм управления сельскохозяйственной организацией, основным видом деятельности которой является свинопроизводство. Он состоит из следующих восьми этапов
Экономико-математическое моделирование производственных...
Сельское хозяйство можно отнести к сложной экономической системе.
Множество ученых в сельскохозяйственных вузах занимаются разработкой и внедрением результатов экономико-математических методов в планирование и управление сельским хозяйством.




