В данной статье рассматривается разработка экспериментальной установки, предназначенной для оценки проницаемости космических лучей через атмосферу. В основе конструкции находится стратосферный зонд, построенный на базе микроконтроллера ESP32. Он оснащён дозиметром AtomFast, осуществляющим связь через BLE, а также дополнительными модулями для измерения параметров окружающей среды и определения координат. Одновременно данные собираются с трёх дозиметров, размещённых на борту зонда, наземной станции и космическом аппарате. Работа системы основана на получении, обработке и передаче данных в формате JSON с применением избыточных методов для повышения отказоустойчивости. Запись информации осуществляется на SD-карту с использованием openLog. Программная реализация выполнена на языке C/C++ в среде VSCode с использованием платформы PlatformIO.
Ключевые слова : стратосферный зонд, телеметрия, ESP32, радиационный фон, дозиметрия, BLE-связь, JSON, GPS, акселерометр, гироскоп, магнитометр, датчики атмосферы, энергосистема, SD-карта, PlatformIO.
Введение
Исследование космических лучей и высокоэнергетических частиц требует точных измерений их характеристик в различных слоях атмосферы. Для выполнения этой задачи была разработана экспериментальная установка, в состав которой входит стратосферный зонд, оснащённый системой сбора данных, показан на рис. 1. Использование микроконтроллера ESP32 и периферийных устройств позволяет фиксировать радиационный фон, параметры атмосферы и географическое положение. Полученные результаты можно использовать для калибровки измерений, выполняемых с наземных и орбитальных платформ.

Рис. 1. Стратосферный зонд
Архитектура системы и аппаратные компоненты
Система включает в себя дозиметр AtomFast, который фиксирует количество импульсов, скорость накопления дозы и её общий показатель. Связь дозиметра с микроконтроллером осуществляется через BLE. В процессе передачи информации выполняется подключение BLE-сервера и регистрация уведомлений, содержащих основные параметры измерений.
Для определения высоты, температуры и влажности в составе зонда используется барометр BMP085 и датчик DHT11. Первый компонент позволяет получать данные о температуре и давлении, на основе которых вычисляется высота. Второй датчик обеспечивает измерение влажности и температуры окружающей среды. Координаты определяются с помощью GPS-модуля, данные которого обрабатываются библиотекой TinyGPSPlus. Система позиционирования позволяет фиксировать широту, долготу, скорость движения, курс, дату и время. Дополнительно выполняется контроль качества сигнала и определение количества доступных зондов.
Дополнительные измерения включают в себя регистрацию параметров ориентации и движения. Гироскоп и акселерометр MPU6050 обеспечивают сбор информации об углах наклона и динамических характеристиках зонда. Компас QMC5883L фиксирует векторные показатели магнитного поля, а датчик тока и напряжения INA226 анализирует состояние энергосистемы, оценивая напряжение, силу тока и мощность.
Передача данных реализована с применением радио модуля ebyte e32 и технологии BLE. Система формирования сообщений использует JSON-структуру, в которой предусмотрены короткие и расширенные пакеты данных. Первый содержит основные показатели, включая результаты измерений с дозиметра, информацию о температуре, влажности, координатах. Второй включает в себя дополнительные сведения, например, показания гироскопа, компаса, параметры энергопотребления. Использование двух форматов передачи позволяет при необходимости восстанавливать информацию, даже если одно из сообщений оказывается повреждённым.
Запись информации осуществляется с применением модуля openLog, что обеспечивает сохранность данных на SD-карте. Такой подход позволяет анализировать измерения даже в случае потери связи со зондом.
Программная реализация
Программный код написан на C/C++ с использованием среды PlatformIO. На этапе инициализации происходит настройка всех компонентов системы, включая BLE-соединение, GPS-модуль и сенсоры. В ходе работы выполняется считывание параметров дозиметра, которое организовано через регистрацию уведомлений BLE. При каждом обновлении информации она преобразуется и записывается в соответствующие переменные.
Атмосферные параметры считываются периодически. Барометр определяет температуру и давление, после чего вычисляется высота. Данные датчика DHT11 дополняют измерения значениями температуры и влажности воздуха.
Определение координат выполняется через обработку данных GPS, при этом система анализирует валидность полученных значений и сохраняет их в памяти. Для контроля качества фиксации сигнала дополнительно анализируется количество доступных зондов.
Передача информации организована через последовательные порты и систему дублирования сообщений. Данные записываются в JSON-формат и отправляются на приёмные станции, а также фиксируются на SD-карте с помощью openLog. Такой метод позволяет минимизировать вероятность потери данных и обеспечивает возможность последующего анализа измерений.
Основной цикл программы включает периодическое обновление данных, обработку полученной информации и отправку сообщений. Регулярность работы датчиков варьируется: основные параметры обновляются с интервалом в две секунды, а передача расширенной информации выполняется раз в шесть секунд. Дополнительно в систему включены механизмы индикации, позволяющие визуально контролировать работу зонда.
Формат JSON-сообщений
Передача данных осуществляется в виде двух последовательных JSON-сообщений, содержащих фиксированную последовательность данных. Первое сообщение включает в себя основные параметры, необходимые для минимального функционирования системы, а второе расширяет их, предоставляя дополнительные сведения о состоянии зонда:
{«pc»:19»,pres»:101544»,t»:24.2»,h»:24.6»,lat»:0»,lng»:0»,galt»:0}
{«dr»:0.05»,ad»:0.24»,td»:23»,bat»:100»,mps»:0»,deg»:0»,chyx»:89.59»,chzx»:353.14»,tx»:0.16»,ty»:2.36»,tz»:-3.13»,tb»:29.1»,alt»:0.082966»,salt»:-17.80188, «cx»:925»,cy»:4002»,cz»:-327»,gx»:0»,gy»:0»,gz»:0»,ax»:0»,ay»:0»,az»:0»,gs»:true»,sc»:0»,d»:29»,mh»:1»,y»:2025»,hr»:15»,m»:14»,s»:5»,u»:4.56»,i»:3276.7»,p»:14942.5»,c»:26}
Каждая переменная несёт определённый смысл:
pc — показания дозиметра
pres — атмосферное давление
t — температура окружающей среды
h — влажность
lat, lng — координаты (широта и долгота)
galt — высота над уровнем моря
dr, ad, td — параметры радиационного фона
mps — скорость
deg — направление движения
chyx, chzx — показатели ориентации
alt, salt — высота по данным барометра
cx, cy, cz — параметры магнитного поля
gx, gy, gz — показания гироскопа
ax, ay, az — акселерометр
Дублирование данных в коротком и расширенном сообщении позволяет использовать методы машинного обучения, в частности, нейронные сети на наземной станции, для восстановления повреждённой информации в случае потери части данных.
Экспериментальная методология
Для оценки проницаемости космических лучей измерения проводятся одновременно в трёх точках: на стратосферном зонде, наземной станции и космическом аппарате. Сравнение полученных данных позволяет определить влияние атмосферы на поток частиц. Применение JSON-структуры для хранения информации и дублирование сообщений повышает надёжность системы и обеспечивает возможность восстановления повреждённых данных.
Данные, получаемые со зонда в виде таблицы представлены на рис. 2.
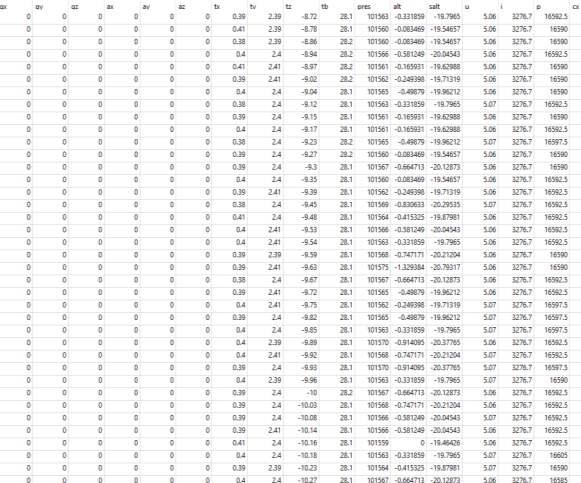
Рис. 2. Таблица данных зонда
Заключение
Разработанная система демонстрирует эффективность в проведении экспериментов, направленных на исследование проницаемости космических лучей. Использование микроконтроллера ESP32 и периферийных устройств позволяет получить точные данные о радиационной обстановке, параметрах атмосферы и координатах зонда. Применение BLE-связи, дублированной передачи данных и записи на SD-карту обеспечивает отказоустойчивость и надёжность эксперимента. Разработанная методология может быть использована для дальнейших исследований в области мониторинга радиационного фона и аэрокосмических измерений.

