В данной работе рассматривается решение обратной задачи динамики кинематических цепей. Предполагается что тела соединены произвольными вращательными сочленениями. Важным аспектом повествования является использование тензорной формы механики, основанной на работах Жилина П. А. В результате работы получены замкнутые аналитические выражения сил и моментов.
Ключевые слова: кинематические цепи, робототехника, обратная задача динамики, кинематика цепей, динамика цепей, тензорное исчисление, прямая задача кинематики.
Введение
При построении сложных робототехнических систем приходится решать ряд задач планирования движения и расчета динамики конкретного механизма. При этом обычно строится желаемое движение механизма, затем определяются силы и моменты, которые необходимы для реализации заданного движения, после чего выводятся уравнения движения. В реальном устройстве, с использованием уравнений движения и требуемого распределения сил и моментов, система стабилизируется около рабочей траектории. При этом должна быть решена задача нахождения сил, так же известная как обратная задача динамики. В данной работе рассмотрено решение данной задачи в приложении к кинематическим цепям абсолютно твердых тел со вращательными сочленениями. Важным аспектом повествования является применение тензорного исчисления в приложении к теоретической механике на основе работ Жилина П. А.
Кинематика цепей тел
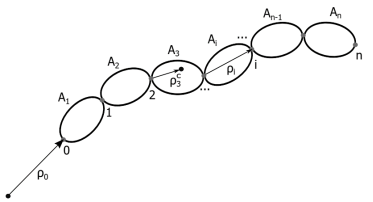
Рис. 1. Схематичный вид кинематической цепи.
Многие механизмы могут быть представлены как соединения звеньев, которые приближаются абсолютно твердыми телами. В свою очередь базовым является механизм из последовательно соединенных звеньев. Рассмотрим кинематику подобной цепи. Введем следующие обозначения:
-
 — i-e звено цепи (абсолютно твердое тело),
— i-e звено цепи (абсолютно твердое тело),
-
 — длинна кинематической цепи (количество тел,
— длинна кинематической цепи (количество тел,  ),
),
-
 — вектор положения
— вектор положения  -го сочленения (неподвижной точки соединения),
-го сочленения (неподвижной точки соединения),
-
 — скорость -го сочленения (неподвижной точки соединения),
— скорость -го сочленения (неподвижной точки соединения),
-
 — вектор положения сочленения относительно
— вектор положения сочленения относительно  , при этом
, при этом  выбирается произвольно,
выбирается произвольно,
-
 — вектор положения начала кинематической цепи,
— вектор положения начала кинематической цепи,
-
 — вектор центра масс тела i относительно i-го сочленения,
— вектор центра масс тела i относительно i-го сочленения,
-
 — вектор положения центра масс тела i,
— вектор положения центра масс тела i,
-
 — вектор скорости центра масс тела i,
— вектор скорости центра масс тела i,
-
 — угловая скорость i-го сочленения,
— угловая скорость i-го сочленения,
-
 — тензор поворота (ориентации) i-го сочленения.
— тензор поворота (ориентации) i-го сочленения.
Предположим, что тензоры ориентации звеньев кинематической цепи выражаются последовательными поворотами: ![]() . Тогда, в соответствии с теоремой сложения угловых скоростей в тензорном виде [5, 6], запишем угловую скорость звена
. Тогда, в соответствии с теоремой сложения угловых скоростей в тензорном виде [5, 6], запишем угловую скорость звена ![]() :
: ![]() , где
, где ![]() — угловая скорость поворота
— угловая скорость поворота ![]() (здесь и далее
(здесь и далее ![]() — операция нахождения векторного инварианта тензора
— операция нахождения векторного инварианта тензора ![]() [4, 7]). В соответствии с теоремой Эйлера [2, 3] можем записать линейную скорость произвольного сочленения:
[4, 7]). В соответствии с теоремой Эйлера [2, 3] можем записать линейную скорость произвольного сочленения: ![]() . Найдем теперь угловое ускорение звена
. Найдем теперь угловое ускорение звена ![]() :
:  . В соответствии с распределением ускорений в твердом теле [2, 3] запишем ускорение сочленения
. В соответствии с распределением ускорений в твердом теле [2, 3] запишем ускорение сочленения ![]() :
: ![]() Аналогично для скоростей и ускорений центра масс тела
Аналогично для скоростей и ускорений центра масс тела ![]() :
: ![]() ,
, ![]() . Таким образом найдены все необходимые скорости и ускорения звеньев цепи, выраженные через характеристики относительных поворотов
. Таким образом найдены все необходимые скорости и ускорения звеньев цепи, выраженные через характеристики относительных поворотов ![]() .
.
Производные динамических характеристик
Пусть тензоры инерции ![]() твердых тел заданы относительно центра масс.
твердых тел заданы относительно центра масс. ![]() , где
, где ![]() — тензор инерции
— тензор инерции ![]() -го тела в отсчетный момент времени, а
-го тела в отсчетный момент времени, а ![]() — в текущий.
— в текущий. ![]() — количество движения
— количество движения ![]() -го тела цепи,
-го тела цепи, ![]() — кинетический момент тела
— кинетический момент тела ![]() относительно центра масс. Тогда:
относительно центра масс. Тогда:


![]() — правый вектор угловой скорости.
— правый вектор угловой скорости.
Силы и моменты в кинематической цепи
Рассмотрим движение ![]() -го тела кинематической цепи, пусть
-го тела кинематической цепи, пусть ![]() тело цепи действует на тело силой
тело цепи действует на тело силой ![]() , тогда со стороны предыдущего тела действует сила
, тогда со стороны предыдущего тела действует сила ![]() , теперь можем записать силу, с которой окружение действует на тело:
, теперь можем записать силу, с которой окружение действует на тело:
![]()
Соответственно рассмотрим момент относительно центра масс, действующий на тело ![]() :
:
![]() (1)
(1)
Известно, что любой момент может быть записан в следующем виде:
![]()
Здесь ![]() — произвольная точка, называемая точкой приведения. При этом, если тело не сопротивляется поворотам около точки
— произвольная точка, называемая точкой приведения. При этом, если тело не сопротивляется поворотам около точки ![]() вокруг какой-либо оси
вокруг какой-либо оси ![]() , то проекция
, то проекция ![]() на эту ось равна нулю. Разложим таким образом все члены в правой части (1), выбирая в качестве точки приведения неподвижную точку соответствующего соединения, а для силы тяжести — центр масс тела.
на эту ось равна нулю. Разложим таким образом все члены в правой части (1), выбирая в качестве точки приведения неподвижную точку соответствующего соединения, а для силы тяжести — центр масс тела.
![]() .
.
Введем обозначения ![]() , учтем определение вектора
, учтем определение вектора ![]() и
и ![]() , тогда выражение примет вид:
, тогда выражение примет вид:
![]()
Теперь можем составить уравнения баланса кинетического момента и уравнение баланса количества движения для каждого звена на основе теорем об изменении количества движения и кинетического момента твердого тела [1, 3].
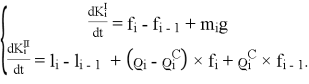 (2)
(2)
Таким образом выведены динамические уравнения, которые с одной стороны позволяют приступить к решению обратной задачи динамики, а с другой стороны — вывести дифференциальные уравнения движения цепи в обобщенных координатах (для этого требуется параметризировать все тензоры ориентации обобщенными координатами).
Обратная задача динамики кинематической цепи
Рассмотрим систему (2), неизвестными в ней выступают ![]() вектора
вектора ![]() , при этом имеется всего
, при этом имеется всего ![]() векторных уравнений, линейных относительно неизвестных. Таким образом решение системы (2) выражается через два векторных параметра. Для решения неоднозначности выберем в качестве параметров вектора
векторных уравнений, линейных относительно неизвестных. Таким образом решение системы (2) выражается через два векторных параметра. Для решения неоднозначности выберем в качестве параметров вектора ![]() и найдем вид решения.
и найдем вид решения.
Теорема. Пусть задано движение кинематической цепи. Допустим, например, что в любой момент времени известны следующие характеристики:
-
 — константы кинематической цепи (вектора относительных положений сочленений, центров масс, тензоры инерции и массы звеньев в отсчетный момент времени),
— константы кинематической цепи (вектора относительных положений сочленений, центров масс, тензоры инерции и массы звеньев в отсчетный момент времени),
-
 — определяющие движения (вектор положения начала цепи и тензоры последовательных поворотов звеньев).
— определяющие движения (вектор положения начала цепи и тензоры последовательных поворотов звеньев).
Тогда силы и моменты ![]() однозначно выражаются через вектора
однозначно выражаются через вектора ![]() То есть решение обратной задачи динамики является двупараметрическим семейством сил и моментов векторных параметров.
То есть решение обратной задачи динамики является двупараметрическим семейством сил и моментов векторных параметров.
Доказательство. Докажем теорему конструктивно. Для начала будем идти по возрастающему индексу ![]() .
.
Прямой проход:
Исходя из описанной кинематики, последовательно для ![]() находим:
находим:
-
 ,
,
-
 ,
,
-
 ,
,
-
 ,
,
-
 ,
,
-

-
 ,
,
-
 ,
,
-
 ,
,
-
 ,
,
-
 ,
,
-
 ,
,
-
 .
.
Обратный проход:
Используя (2) вычисляем силы, действующие в сочленениях для ![]() :
:
И, аналогично, опираясь на второе равенство в системе (2), моменты в сочленениях:

Раскрывая итеративные равенства, окончательно получаем:

(3)
В силу однозначности всех выполненных операций — решение единственно при заданных векторных параметрах. Таким образом теорема полностью доказана, а решение — найдено.
Решение для цепи со свободным концом
Конец цепи называется свободным, если для него выполняются условия ![]() . При этом однозначно определено решение обратной задачи, в частности, если цепь закреплена начальным концом на основании, то реакция опоры так же определена. Вид решений можно получить если подставить в (3) условие
. При этом однозначно определено решение обратной задачи, в частности, если цепь закреплена начальным концом на основании, то реакция опоры так же определена. Вид решений можно получить если подставить в (3) условие ![]() .
.
Заключение
В работе использован аппарат тензорного исчисления, с помощью которого описана кинематика и динамика цепных механизмов. Также приведено подробное изложение процесса нахождения сил в системе. Таким образом, основным результатом работы является (3) — решение в явном виде обратной задачи динамики кинематической цепи с произвольными вращательными сочленениями. С другой стороны, полученные выражения могут быть использованы для записи уравнений движения в обобщенных координатах. Для этого достаточно рассматривать правые части указанных уравнений как параметризованные обобщенными координатами и учесть оси вращения сочленений.
Литература:
- Пупышева Ю. Ю., Бабаджанянц Л., К., Пупышев Ю. А. Классическая механика. Издательство Санкт-Петербургского Университета, 2011.
- Королев В. С., Потоцкая И. Ю., Ермолин В. С. Теоретическая механика. Кинематика. ВВМ СПбГУ, 2012.
- Королев В. С., Потоцкая И. Ю., Ермолин В. С. Теоретическая механика. Динамика. ВВМ СПбГУ, 2013.
- Вильчевская Е. Н. Тензорная алгебра и тензорный анализ. СПб.: Издательство Политехнического Университета, 2012.
- Жилин П. А. Векторы и тензоры второго ранга в трехмерном пространстве. СПбГПУ, 2012.
- Жилин П. А. Динамика твердого тела. СПбГПУ, 2014.
- Leonid Lebedev, M. J. Cloud, and Victor Eremeyev. Tensor analysis with applications in mechanics, 2nd edition. World Scientific Pub Co Inc, 2010.

