В последние годы в Российском образовании всё более популярной становится образовательная робототехника. Сотни школ используют конструкторы нового поколения в дополнительном и основном образовании. Многие практики робототехники рассматривают образовательную робототехнику как новую педагогическую технологию, направленную на приобщение детей и молодёжи к техническому творчеству, развитию навыков конструирования, моделирования и программирования.
Во многих регионах России образовательная робототехника успешно развивается на протяжении уже нескольких лет. Среди таких регионов Московская область, Санкт-Петербург, Архангельск, Челябинск, Екатеринбург, Курган, Нижний Новгород, Новосибирск и многие другие. Робототехника становится сегодня популярным и эффективным средством в изучении информатики, физики, технологии, химии, биологии и других предметов, что позволяет достигать высоких результатов в обучении и мотивации школьников к выбору профессий инженерно-технического профиля.
До недавнего времени робототехника развивалась, в основном, в качестве внеклассной формы работы. Большинство публикаций посвящалось анализу опыта этой работы. В настоящее время пока не проводятся специальные исследования по использованию робототехники в учебном процессе, в частности по физике. Вместе с тем в связи с требованиями ФГОС имеются возможности для модернизации преподавания физики с применением робототехнических наборов. Опыт работы МАОУ «СОШ № 135» г. Перми, совместно Кафедрой мультимедийной дидактики и информационных технологий обучения Пермского государственного гуманитарно-педагогического университета в течение последних двух лет позволяет сформулировать подходы к формированию методики использования робототехники в преподавании физики, а также проанализировать и обобщить опыт работы российских коллег в направлении использования робототехники в учебном процессе.
Мы определяем следующие педагогические цели использования робототехники в преподавании физики:
1) демонстрация возможностей робототехники как одного из ключевых направлений научно-технического прогресса;
2) демонстрация роли физики в проектировании и использовании современной техники;
3) повышение качества образовательной деятельности:
- углубление и расширение предметного знания,
- развитие экспериментальных умений и навыков,
- совершенствование знаний в области прикладной физики,
- формирование умений и навыков в сфере технического проектирования, моделирования и конструирования;
4) развитие у детей мотивации изучения предмета, в том числе познавательного интереса;
5) усиление предпрофильной и профильной подготовки учащихся, их ориентация на профессии инженерно-технического профиля.
В связи с появлением новых возможностей в организации учебного процесса с использованием роботов можно выделить следующие компоненты учебного процесса, в которых появляется робототехника:
1. Урочные формы работы: измерения, проектные работы, демонстрационный эксперимент, лабораторные работы, сообщения, практикумы.
2. Элективные курсы, клубная и кружковая формы работы.
3. Исследования, проектная работа, участие в НПК, конкурсах, включая дистанционные и сетевые формы.
При этом, по нашему мнению, школьник должен иметь возможность самоопределиться в выборе уровня знакомства с робототехникой. Либо ему будет достаточно базового уровня, который предполагает в основном урочные формы работы, либо он будет знакомиться с робототехникой по расширенному или углублённому варианту, выбирая элективные курсы, проекты и другие формы (рис. 1).
|
|
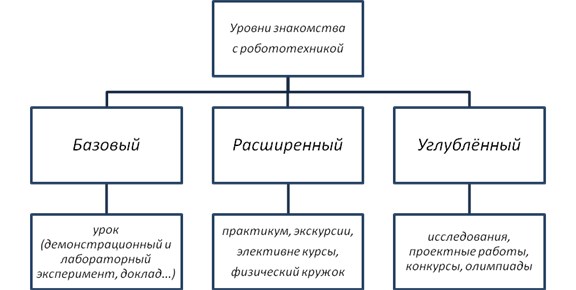
Рис.1. Уровни знакомства с робототехникой в процессе изучения физики
Для наиболее полного достижения поставленных целей использования робототехники, роботы в школьном курсе физики должны быть представлены не только как средство практической деятельности школьников, но и как объект теоретического изучения. Большинство датчиков робототехнических наборов, а также исполнительных элементов роботов имеют физические принципы действия, которые изучаются в школьном курсе физики, поэтому, например, при изучении соответствующих тем целесообразно акцентировать внимание на практическое использование законов в современной технической области. Таким образом, нами предлагается следующая система использования учебных роботов в предметной области физики:
|
Робот как объект изучения |
Изучение принципа работы элементной базы робота |
Датчики, приводы (электропривод, гидропривод, пневмопривод), светоиндикация, механические передачи, параметры электрических цепей робототехнического оборудования и др. |
|
Роль робота в современных научных исследованиях |
Космические исследования, исследования глубин, радиационная разведка, исследование микромира и др. | |
|
Роль робота в проектировании и использовании современной техники |
Промышленные роботы, роботы на транспорте, использование роботов в экстремальных условиях, медицине, сфере услуг. | |
|
Робот как средство изучения |
Робот как средство измерения |
Использование датчиков базового конструктора и совместимых датчиков (Vernier, HiTechnic и др.) Конструктор используются как измерительная система с обработкой и фиксацией результатов в различных видах. |
|
Робот как средство постановки автоматизированного эксперимента |
· Сборка демонстрационных и лабораторных установок из робототехнического оборудования · Интеграция оборудования кабинета физики и робототехнического оборудования | |
|
Робот как средство моделирования |
· Моделирование промышленных, бытовых, транспортных и других видов устройств; · моделирование явлений природы. | |
|
Робот как средство творческого проектирования |
Робот как средство технической модернизации существующих устройств |
Совместное использование роботов с другими системами, адаптация робота к новым условиям. |
|
Проектирование новых роботизированных устройств |
Проектирование новых видов датчиков и других систем, вымышленных устройств из будущего и др. |
В некоторых направлениях представленной системы имеются достаточно интересные методические наработки как у нас в стране, так и за рубежом. В последние годы появилось достаточно много публикаций, знакомящих с опытом внедрения робототехники в учебный процесс. Вместе с тем, ряд учебных пособий по организации курсов и кружков и других видов внеклассной работы также может быть полезен при организации предметной работы по физике.
Первые отечественные работы в области образовательной робототехники относятся к началу 90-х годов. В частности, в учебном пособии для 8–9 классов средней школы А. П. Алексееваидр. «Робототехника» [1] изложен теоретический материал по робототехнике и система практических занятий для построения самодельного робота. Книга предназначена для школьных объединений (кружков, факультативов), занимающихся конструированием автоматизированных систем. В учебном пособии можно выделить идеи, которые будут полезны для целей использования робототехники в изучении физики на современном этапе.
Первая: раздел «Анатомия промышленного робота имеет подробное описание механических принципов функционирования манипуляторов и движущихся роботов.
Вторая: в параграфе «Приводы промышленных роботов» описаны принципы функционирования пневматического, гидравлического и электрического приводов. Подробно раскрыты физические принципы действия каждого из них, приведены примеры экспериментов, поясняющих физическое содержание, а также описаны стенды, произведённые для изучения приводов. Дополнительно имеются сведения о редукторах и датчиках, а также описаны механические передачи, электромеханические элементы (кнопки, переключатели), электрические схемы логических элементов, электроизмерительные приборы, электромагнитные устройства, программируемые контроллеры.
Третья: в пособии раскрываются физические принципы работы некоторых видов датчиков, а также система управления учебного робота 90-х годов: электронные элементы и узлы робота от полупроводниковых приборов до микросхем, рассмотрена работа электропривода с ЧПУ для учебного робота.
В заключительной части учебного пособия содержится описание использования промышленных роботов, роботов предназначенных для работы в экстремальных условиях и перспективы развития робототехники.
Книга Боголюбова А. Н. и Никитина Д. А. «Популярно о робототехнике» [2] написана для широкого круга читателей, интересующихся вопросами развития автоматики и робототехники. В книге в популярной форме изложены фундаментальные вопросы робототехники, а также вопросы физического и математического моделирования роботов. В плане использования книги в преподавании физики можно отметить три аспекта:
Первый аспект: раскрываются вопросы инженерной психологии и взаимодействия машины и человека. Описана взаимосвязь работы создателей роботов и биокибернетиков в середине XX века, дан анализ развития теории биологического моделирования (на основе работ Н. А. Умова, Д. А. Гольдгаммера, А. В Немилова).
Второй аспект: описаны физические принципы кибернетических процессов и элементов. Например, дана физическая трактовка датчика и элемента воздействия на систему (исполнительный механизм). Под датчиком предлагается понимать любой элемент, который позволяет прямо или косвенно обнаруживать знак и величину изменения какого-либо физического параметра системы. А под элементом воздействия — все, что прямо или косвенно может воздействовать на объект доступными нам материальными способами или средствами. Ещё один пример, который раскрывает физический смысл очень распространённого на сегодняшний день устройства — сервомеханизма: «Основная функция сервомеханизма заключается в создании переменного выходного сигнала y(t) той же функциональной формы, какой обладает и переменный входной сигнал x(t) стем условием, что энергия, связанная с выходным сигналом, должна заимствоваться из местного источника, а не поставляться непосредственно входным сигналом, т. е. y(t)=kx(t).Таким образом, сервопривод является усилителем с обратной связью, в котором причина, приводящая систему в действие, зависит от следующей комбинации входного и выходного сигналов: ε(t)=kx(t)-у(t)».
Третий аспект: описана история развития автоматизации производства с 30-х по 60-е годы XX столетия в нашей стране и в США, а также теория систем регулирования (Г. В. Щипанов). Самые различные примеры автоматизации, возникшие в это время можно встретить в окружающей жизни. Например, рассматриваются разомкнутая и замкнутая системы регулирования (отличаются наличием и отсутствием наблюдателя, участвующего в регулировании). Эти процессы в истории развития автоматики назывались процессами управления и регулирования. Приведён пример работы системы стабилизации температуры в помещении. Рассмотрены автоматические технические устройства до появления робототехники, которые состояли из следующих функциональных элементов: датчика, который выявляет воздействие; логики, сравнивающей регулируемую величину с заданным значением; усилителя и сервопривода. Сервопривод и усилитель активизируют связи и управляют исполнительным устройством. Первые системы автоматизации устанавливались на паровые поршневые машины, затем паровые турбины, двигатели внутреннего сгорания, а впоследствии и электрические машины.
Интенсивное развитие образовательной робототехники началось с появления в 1998 году специализированных робототехнических наборов компании LEGO под названием LEGO Mindstorms с программируемым блоком RCX. В 2006 году начался выпуск второго поколения LEGO Mindstorms с блоком NXT, а в 2013 году третьего поколения с блоком EV3. На сегодняшний день в продаже имеется около десятка различных робототехнических конструкторов различных производителей для различного возраста школьников и студентов.
Автор книги «Робототехника для детей и родителей» [3] Сергей Александрович Филиппов является учителем информатики и робототехники физико-математического лицея № 239 г. Санкт-Петербурга. Достаточно популярная во многих регионах России книга написана для детей, начинающих работать с конструкторами, руководителей кружков, родителей. В книге изложены основы конструирования на основе конструктора Lego Mindstorms, программирования на языках NXT-G, Robolab и RobotC, элементы теории автоматического управления, а также описаны принципы работы и программы некоторых базовых конструкций роботов для соревнований. В 2013 году в продаже появилось третье издание книги.
В публикации старшего научного сотрудника Центра развития образования ИПКиПРО Курганской области Дмитрия Алексеевича Каширина «Использование конструктора LEGO «Технология и физика» в учебной и внеурочной деятельности в общеобразовательных учреждениях» [4] рассматриваются возможности мобилизации исследовательской деятельности в области изучения классической механики и основ магнетизма при использовании образовательного конструктора «Технология и физика» (комплект Lego 9632). Каширин Д. А. отмечает, что «Конструктор может быть использован в демонстрационном и лабораторном эксперименте, а также при решении экспериментальных задач и проектной деятельности. Например, при изучении следующих тем: равномерное и неравномерное движение, инерция, сила, простые механизмы, энергия и д. р. Это возможно благодаря тому, что можно собрать из одного комплекта различные установки и механизмы». Автор предлагает использовать конструктор при проведении лабораторных работ таких как, «Выявление условия равновесия рычага» и «Определение КПД при подъеме тела по наклонной плоскости». Как отмечает автор: «При этом можно использовать как стандартные измерительные приборы и материалы, например, динамометр, масштабная линейка, набор грузов известной массы, так и современные цифровые приборы, например, датчиковые системы Среды AFSTM. При этом вместо динамометра можно использовать датчик силы, а масштабная линейка может быть заменена датчиком расстояния. В этом случае эксперимент получится наглядным, интересным…».
В учебном практикуме для 5–6 классов «Первый шаг в робототехнику» Копосова Дениса Геннадьевича [5], учителя информатики и ИКТ МБОУ «Средняя общеобразовательная школа № 24" города Архангельска, старшего преподавателя кафедры прикладной информатики и информатизации образования Института математики и компьютерных наук Северного (Арктического) федерального университета имени М. В. Ломоносова имеется описание физических принципов работы ряда датчиков, входящих в базовый набор Lego Mindstorms, примеры нескольких проектов, моделирующих работу измерительных приборов. К иллюстрированным описаниям работы датчиков из набора LEGO Mindstorms подобран ряд заданий на работу с конкретным видом датчиков, а также прилагаются табличные данные физического характера для сравнения (оценки) различных показателей. В учебном пособии приводятся примеры проектов, которые можно выполнить для освоения принципа работы датчика. В пособии приводятся проекты для сборки следующих измерительных приборов: тахометр, измеритель громкости, измеритель освещённости, одометр, курвиметр, спидометр, дальномер. Данный вариант практикума, к которому также разработан вариант рабочей тетради, можно рассматривать как пропедевтику изучения физики на основе базового набора Lego Mindstorms. Автор пособия в своих публикациях многократно подтверждает важную роль использования робототехнического набора в формировании физического мышления и инженерного мышления школьников наряду с использованием учебных наборов для изучения микроэлектроники. Концепция инженерной школы на базе робототехники и микроэлектроники изложена автором на сайте «Начала инженерного образования в школе» (http://www.koposov.info). Достаточно интересные идеи использования проектов по робототехнике в учебном процессе представлены Копосовым Д. Г. в цикле видеолекций издательства «Бином» «Уроки робототехники в школе»[10]
Белиовская Лидия Георгиевна, к.ф.-м.н., учитель информатики, руководитель Зеленоградской лаборатории робототехники на базе ГБОУ лицея № 1557 г. Москвы в своей книге «Программируем микрокомпьютер NXT в LabVIEW» [6] раскрывает широкие возможности языка LabVIEW для программирования микропроцессорных блоков NXT. LabVIEW используется в системах сбора и обработки данных, а также для управления техническими объектами и технологическими процессами и ориентирован на решение задач автоматизации научных исследований. При реализации творческих проектов и учебных исследований LabVIEW позволяет широко использовать дополнительное исследовательское оборудование, совместимое с конструктором LEGO Mindstorms. Использование различного рода виртуальных шкал, вывода результатов исследований в реальном времени в виде графиков, диаграмм и таблиц, а также многих других инструментов языка, включая создание интерфейса программы, позволяет сделать исследование более доступным и наглядным. Организуя уже несколько лет научно-исследовательские проекты с детьми, мотивированными к обучению математике, физике и программированию, Лидия Георгиевна в своей статье «Самостоятельный физический эксперимент в современном типовом и цифровом кабинетах физики при реализации Федерального государственного образовательного стандарта» [7]отмечает следующие возможности в организации исследовательской работы по физике с применением робототехнических наборов Lego Mindstorms и дополнительного оборудования: повышение точности измерений за счёт автоматизации, синхронизация показаний нескольких датчиков, точное позиционирование датчика в случае пространственного измерения величины. Среди примеров проектных работ можно назвать следующие: «Определение работы сил тяжести, трения, упругости», «Изучение дифракции света», «Изучение интерференции света», «Изучение силы трения», «Составление карты магнитного поля полосового магнита и соленоида».
Системность работы Министерства образования Челябинской области в направлении развития робототехники началась с приобретения робототехнических комплексов в 2007 году для каждого образовательного учреждения и поддержке Лего-движения на протяжение последних нескольких лет, что позволило сделать робототехнику массовой педагогической технологией. Вприложении № 12 к письму Министерства образования и науки Челябинской области от 03.08.2009 г. № 103/3431 «О преподавании учебного предмета «Физика» в общеобразовательных учреждениях Челябинской области в 2009–2010 учебном году» [9] содержатся рекомендации по внедрению Лего-технологий: «…Современная организация учебной деятельности требует того, чтобы теоретические обобщения учащиеся делали на основе результатов собственной деятельности. Для учебного предмета «физика» — это учебный эксперимент. Принципиально изменились роль, место и функции самостоятельного эксперимента при обучении физике: учащиеся должны овладевать не только конкретными практическими умениями, но и основами естественнонаучного метода познания, а это может быть реализовано только через систему самостоятельных экспериментальных исследований. Lego-конструкторы существенно мобилизуют такие исследования. Особенностью преподавания учебного предмета «Физика» в 2009/2010 учебном году является использование образовательных Лего-конструкторов, которые позволяют в полной мере реализовать принцип личностно-ориентированного обучения, провести демонстрационные эксперименты и лабораторные работы, охватывающие практически все темы курса физики и выполняющие не столько иллюстративную функцию к изучаемому материалу, а требующие применения исследовательских методов, что способствует повышению интереса к изучаемому предмету». В Челябинске действует центр, координирующий методическую работу по развитию робототехники в регионе. Центром организуются методические конкурсы, семинары, выпуск методических пособий, среди которых в 2011 году был выпущен сборник «Образовательная робототехника на уроках информатики и физики в средней школе: пособие для учителя» [11]авторов: Мирошина Т. Ф., Соловьева Л. Е., Могилева А. Ю., Перфирьева Л. П. Пособие содержит методические материалы по использованию образовательной робототехники на уроках физики в 7–8 классах: задачи и упражнения, тестовые задания, групповые и индивидуальные задания. Галина Васильевна Лужнова, учитель физики МАОУ СОШ № 14 г. Челябинска ведёт блог «ЛЕГО + физика» [12], в котором собран методический материал для учителей, использующих Лего-конструирование в преподавании физики, информация о семинарах, конференциях, повышении квалификации и многое другое о робототехнике. На всероссийской конференции по методике преподавания робототехники, которая состоялась 8–9 апреля 2013 года в г. Екатеринбурге, Галина Васильевна представила опыт использования специализированных наборов LEGO: «Энергия. Работа. Мощность», «Возобновляемые источники энергии», а также результаты апробации УМК по физике О. Ф. Кабардина с использованием робототехнических наборов.
Сегодня в сети Интернет появляется большое количество педагогических публикаций с опытом использования различных аспектов робототехники в учебном процессе. Интерес детей и учителей к робототехнике растёт, так же как и возможности приобретения оборудования нового поколения.
Подводя итоги, можно отметить, что возможности применения робототехнических конструкторов в учебном процессе достаточно широки и их реализация требует от учителя методической и технической подготовки. Соотнося задачи школьного образования с перспективами автоматизации и роботизации современного производства, необходимо координировать усилия образовательных учреждений, промышленных предприятий, вузов, органов управления образованием для эффективного развития технического мышления школьников, целенаправленного развития способностей инженерно-технического направления.
Литература:
1. Алексеев А. П. и др. Робототехника: учебное пособии для 8–9 классов средней школы./А. П. Алексеев, А. Н. Богатырев, В. А. Серенко. — М., Просвещение. 1993. — 160с.
2. Боголюбова А. Н. Популярно о робототехнике/ А. Н. Боголюбова, Д. А. Никитина, — Киев: Наук. Думка, 1989. — 200с.
3. Филиппов С. А. Робототехника для детей и родителей./ С. А. Филиппов–3-е изд. — СПб.: Наука, 2013.
4. Каширин Д. А. Использование конструктора LEGO «Технология и физика» в учебной и внеурочной деятельности в общеобразовательных учреждениях: Физика. Научно-методический журнал для учителей физики, астрономии и естествознания.// — N08 (944), 1–30.09.2012[Электронный ресурс]:http://ros-group.ru/PUBLICS/SINGLE/PUBLICS/4281
5. Копосов Д. Г. Первый шаг в робототехнику: практикум для 5–6 классов. / Д. Г. Копосов, — БИНОМ. Лаборатория знаний, 2012, — 286с.
6. Белиовская Л. Г. Программируем микрокомпьютер NXT в LabVIEW/ Л. Г. Белиовская, А. Е. Белиовский, — М: ДМК-пресс, 2013 г.
7. Белиовская Л. Г. Самостоятельный физический эксперимент в современном типовом и цифровом кабинетах физики при реализации Федерального государственного образовательного стандарта/ Л. Г. Белиовская // Учительская газета. Независимое педагогическое издание, № 23 (10416) от 5 июня 2012 г.
8. LEGO Mindstorms NXT: основы конструирования и программирования роботов: С сайта: learning.9151394.ru/course/view.php?id=280/ под ред. А. И. Попкова. — Томск — 2010 [Электронный ресурс].
9. Приложение 20 к письму Министерства образования и науки Челябинской области от 03.08.2009 № 103/3431 «О преподавании учебного предмета «Физика» в общеобразовательных учреждениях Челябинской области в 2009–2010 учебном году».
10. Копосов Д. Г. Цикл видеолекций издательства «Бином» «Уроки робототехники в школе»/ Д. Г. Копосов Д. Г. [Электронный ресурс] //http://metodist.lbz.ru/content/video/koposov.php.
11. Мирошина Т. Ф., Соловьева Л. Е., Могилева А. Ю., Перфирьева Л. П. «Образовательная робототехника на уроках информатики и физики в средней школе: пособие для учителя» — Челябинск: РКЦ.
12. Лужнова Г. В. Лего+физика// Лего+физика http://httpwwwbloggercomprofile179964.blogspot.ru/
13. Ларионова Т. П. Программа элективного курса «Робототехника»: [Электронный ресурс] http://rudocs.exdat.com/docs/index-45524.htm
14. Белиовская Л. Г. Система LEGO Mindstorms NXT в современном физическом эксперименте: [Электронный ресурс], http://www.ros-group.ru/content/data/store/images/f_4404_28202_1.pdf
15. Ершов М. Г. Использование элементов робототехники при изучении физики в общеобразовательной школе. [Текст]// XXI век — время молодых. Материалы четвертой открытой научно- практической конференции студентов, аспирантов и молодых ученых 19 мая 2011г., г. Пермь: ПГПУ, 2011.- С.55- 59.2011

