





В работе представлен ряд актуальных аспектов современной робототехники, применительно к автоматизированным системам управления.
Рассмотрена проблематика дистанционного контроля оператора над производственными процессами и технологическими операциями на примере дистанционного управления промышленным роботом-манипулятором DENSO. Представлен принцип взаимодействия человека и машины посредством доступных средств обеспечения, таких как: пульт оператора, персональный компьютер (аппаратная часть), среда разработки и платформа для выполнения программ LabView (программное обеспечение). Дистанционное управление возможно благодаря сети Интернет. Раскрыты идеи, заложенные в алгоритм управления.
Работа может быть рекомендована студентам старших курсов, аспирантам и инженерам различной отраслевой направленности, специализирующихся в области мехатронных систем.
Ключевые слова:робототехника, промышленный манипулятор, дистанционное управление, графическая среда программирования, виртуальный прибор
Введение
Смелость инженерной мысли для своей реализации требует все более сложные процессы, требующие точность исполнения с погрешностью, сведенной к минимуму. Также из-за человеческого фактора увеличивается стоимость изготовления продукции: создание изоляции для понижения шума, к примеру, требует внушительных вложений. Большое количество опубликованных в последние годы материалов по безопасности производственных процессов уделяют существенное внимание условиям, приемлемым для здоровья человека. Главной проблемой является то, что в определенных условиях человек не может (или не должен) находится в принципе. Например, при работах на космических станциях, в инфицированных средах, в средах с повышенным радиационным фоном.
Перечисленные выше проблемы ставят на повестку дня вопрос об оптимизации человеческого труда. Для решения данной задачи оптимально использование в помощь человеку промышленных манипуляторов. Робототехника развивается с высокой скоростью, но на данном этапе человека исключить из производства невозможно. Необходимо поручить контроль оператору, а выполнение отдать роботу.
В рамках настоящей работы на примере закручивания гайки рассмотрен принцип дистанционного управления промышленным манипулятором марки DENSO. Выбранный робот имеет высокую точность, успешно работает с небольшими и хрупкими материалами с легкостью и осторожностью [1], что является полезным для реализации данного проекта. Технические характеристики манипулятора представлены в Приложении 1.
1. Принцип управления манипулятором
При поиске решения проблемы дистанционного управления одним из важнейших рассматриваемых критериев была простота реализации и доступность средств.
Управление роботом осуществлялось при помощи пульта оператора (джойстика). Такой способ был выбран в силу удобства и наглядности. Джойстик способен поворачиваться вокруг своей оси на 360 градусов, что очень выгодно для управления процесса монтажа гайки: закручивающий элемент имеет траекторию движения близкую к окружности. Беспроводная связь между оператором и роботом осуществлялась с помощью Wi-Fi. Этот способ был выбран из-за того, что беспроводные сети доступны практически в любой точке мира. Wi-Fi также осуществляет возможность свободного перемещения оператора, так как между ним и манипулятором расстояние может быть различным. Последнее дает неоспоримую выгоду не столько в удобстве управления, сколько в доступности контроля. Процесс закручивания можно наблюдать не только на экране рабочего компьютера, но и на любом другом девайсе, имеющем доступ к сети Интернет. Для трансляции может использоваться любая веб-камера и программа с возможностью видео-передачи, к примеру, Skype.
Алгоритм управления был реализован в графической среде программирования LabView, поскольку данная программа содержит мощные многофункциональные инструменты для разработки любых приложений. С помощью этих инструментов можно работать в самом широком спектре приложений и тратить на разработку гораздо меньшее время. LabView является средой разработки для решения широкого круга задач, повышения производительности и инноваций. [2]
Логика написания программы заключается в создании виртуальных приборов, то есть, по сути, проведении моделирование процесса. Что важно, таким образом манипулятором управляют инженеры, а не программисты.
2. Идея алгоритма
Закручивание гайки происходит следующим образом. Оператор совершает движение джойстика по часовой стрелке для закручивания гайки и против часовой для откручивания.
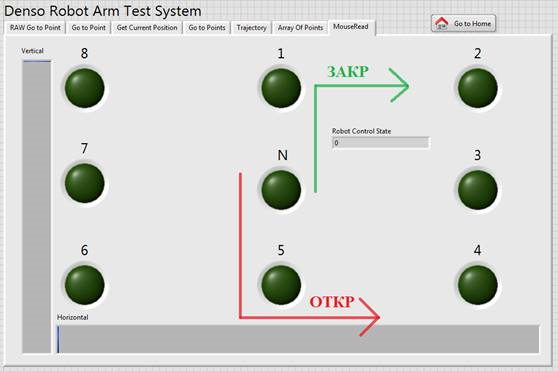
Рис. 1. Схема работы системы
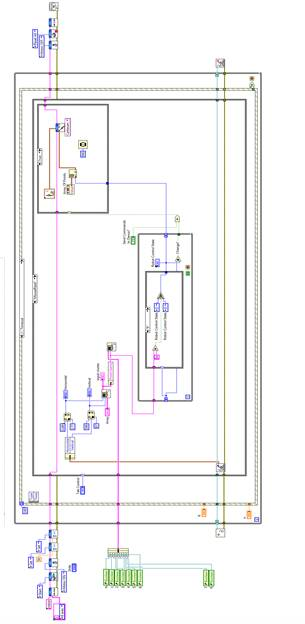
Рабочая область манипулятора описана в программе в виде набора координат. Алгоритм работы в LabView заключается в последовательном выполнении действий по данным координатам оператора. Блок-диаграмма, описывающая логику работы виртуального прибора управления манипулятором, представлена в Приложении 3. Робот определяет местонахождение гайки по координатам, а затем захватывает её и начинает движение по часовой стрелке, если оператору необходимо закрутить гайку и, соответственно, против часовой — если требуется ее раскрутить.
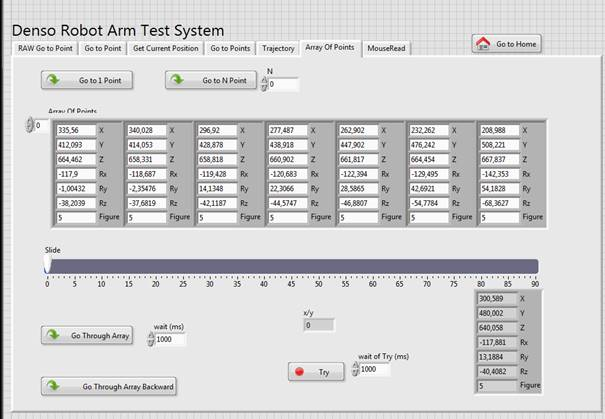
Рис. 2. Лицевая панель, описывающая внешний интерфейс виртуального прибора
Закручивающему движению гаечного ключа поставлено в соответствие вращательное движение джойстика. Координаты, по которым происходит движение джойстика передаются через сеть Интернет с помощью программы Joystick2Mouse. Блок-диаграмма программы Joystick2Mouse представлена в Приложении 2. Эта программа преобразовывает вращательное движение джойстика в движение курсора по прямоугольнику заданных длин сторон. Компьютер считывает координаты курсора и передаёт их через сеть Интернет с помощью пользовательского пакета TeamViewer.
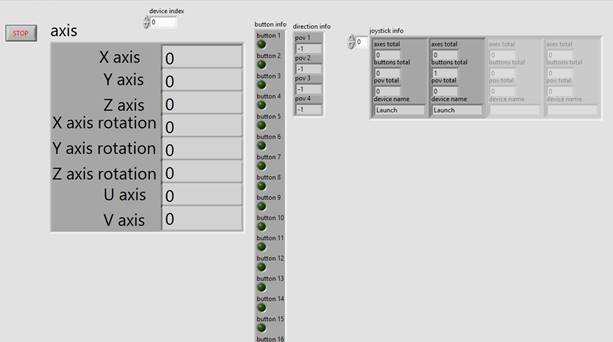
Рис. 3. Лицевая панель программы Joystick2Mouse
Для всех возможных положений курсора определены условные зоны 1, 2, .., 8, N. При входе курсора в определенную зону загорается соответствующая кнопка (рис. 3).
При перемещении курсора в зону 1 программа ожидает закручивания гайки и дальнейшего перехода курсора в зону 2, и так далее до возвращения в зону 1. Это соответствует полному обороту джойстика по часовой стрелке. После этого оператор отпускает джойстик, и курсор переходит в зону N, а манипулятор, сделав полный оборот, возвращается в начальное положение. Аналогично программа работает для раскручивания гайки.
Если вдруг рука оператора сорвётся и пропустит одну из зон, манипулятор не станет двигаться. Это специальное программное ограничение, позволяющее избежать деформации установки.
Заключение
Предложено решение проблемы дистанционного управления промышленным манипулятором. Показано, что при помощи доступных средств обеспечения можно осуществить связь между роботом и оператором. Предложено использовать для этой цели Wi-Fi. Получен программный продукт для реализации дистанционного контроля над промышленным манипулятором.
Приложения
Приложение 1. Технические характеристики манипулятора DENSO VS-6577G-B [1]
- Вес: 36 кг
- Нагрузка до 7 кг
- Радиус действия до: 854 мм
- Максимальная скорость: 7600 мм/с
- Тип крепления: Пол, Потолок
- Класс промышленной защиты (Опционально): IP40, IP65/54
- Класс защиты Cleanroom (Опционально): ISO 3, ISO 5
- Тормоза: J2 до J6
Приложение 2 Блок-диаграмма программы Joystick2Mouse
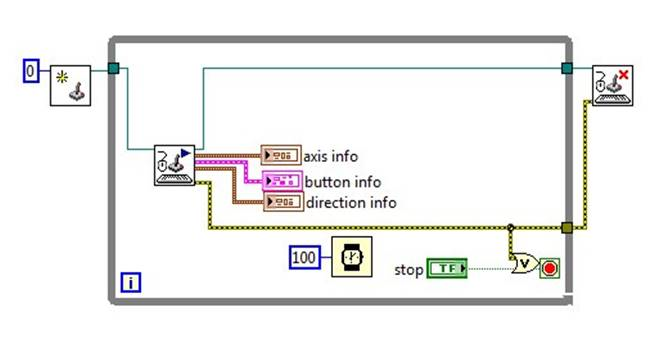
Приложение 3 Блок-диаграмма, описывающая логику работы виртуального прибора управления над манипулятором
Литература:
1. Denso [Офиц. сайт]. URL: http://www.densorobotics-europe.com/ (дата обращения: 27.04.2015)
2. National Instruments [Офиц. сайт]. URL: http://www.ni.com/ (дата обращения: 27.04.2015)
3. Зенкевич С.Л., Ющенко А.С. Основы управления манипуляционными роботами. — М.: издательство МГТУ им. Н. Э. Баумана, 2004 г.
4. Блюм П. LabVIEW: стиль программирования. Пер. с английского под редакцией Михеева П. — М.: ДМК Пресс, 2008 г.
