




Ключевые слова: компьютерный манипулятор, устройство ввода.
Введение
В настоящее время огромное количество людей по всему миру не могут представить свою жизнь без компьютера. Одни использует компьютер для работы и сложных вычислений, другие — для развлечений и отдыха.
Однако при работе с компьютерной мышью большинство людей сталкиваются с определенными недостатками.
Во-первых, использование мыши в дороге, на диване или на природе затруднительно из-за ограниченности или неровности поверхности. Во-вторых, лишние манипуляции по переносу руки от клавиатуры до мыши и обратно, в сумме отнимают немало времени при работе с компьютером. Таким образом становится актуальной проблема создания устройства ввода, заменяющего компьютерную мышь, но лишенную перечисленных недостатков.
Для решения изложенных выше проблем была произведена модернизация компьютерной мыши. Результатом модернизации стали два устройства — TouchSide и TouchSpace.
TouchSide
Первое устройство — TouchSide, представляет собой компактный манипулятор, который надевается на палец и управляется за счет движения по поверхности (рисунок 1).
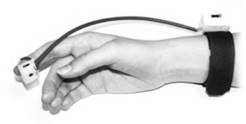
Рис. 1. Внешний вид устройства TouchSide
Устройство состоит из двух модулей. Первый модуль представляет собой наперсток с матрицей, второй — корпус на предплечье пользователя. Данный элемент содержит батарею и передающий модуль.
Однако первая разработка не смогла полностью заменить компьютерную мышь, а лишь помогла решить проблему, связанную с тратой времени на перенос руки от клавиатуры до компьютерной мыши и обратно.
В устройстве TouchSide не удалось реализовать возможность нажатия правой кнопки мыши, а также отсутствовала функция прокрутки экрана (скролл). Узким местом TouchSide был и размер корпуса, который не смог вместить необходимые детали для реализации всех функций присущих обычным компьютерным мышам.
Также в сети Интернет было обнаружено устройство SkyMouse [1], состоящее из наперстков-датчиков. Однако для работы устройства движения должны происходить перед специальной камерой, что сильно ограничивает мобильность устройства.
TouchSpace
После сборки и тестирования TouchSide, а также анализа в сети Интернет различных устройств, наша команда пришла к идее избавить устройство ввода от «привязки» к поверхности. Результатом такой идеи стала концепция устройства под названием TouchSpace.
TouchSpace — манипулятор, позволяющий позиционировать курсор на экране компьютера путем простого перемещения рук в пространстве. Устройство обеспечит еще большую свободу действий и расширенную функциональность по сравнению с TouchSide и обычной компьютерной мышью.
Описание технической части TouchSpace
Управление курсором будет производиться за счет использования трёх маленьких датчиков поворота и перемещения.
TouchSpace состоит из двух модулей.
Первый модуль — три маленьких корпуса («наперстка»), предназначенных для пальцев рук.
Второй модуль — небольшой корпус, крепящийся на предплечье руки.
Для каждого из модулей были спроектированы платы с использованием САПР DipTrace. Изготовление плат планируется осуществлять методом травления [2]. Элементы корпусов устройства планируется напечатать с помощью 3D принтера.
Каждый «наперсток» содержит датчик, передающий сведения о положении пальца и угле поворота от начального положения. Размер датчика — 4мм х 4мм х 1мм. (рисунок 2).
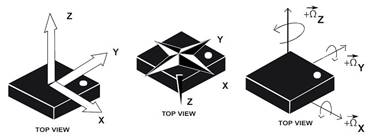
Рис. 2. Возможности датчика
Сигналы от датчика передаются на микроконтроллер, размещенный во втором модуле. В дополнение к микроконтроллеру, модуль будет содержать батарею, кнопку включения и выключения, miniUSB-порт для зарядки и Bluetooth модуль.
Принцип действия устройства
Контроллер получает координаты положения датчика и передает эту информацию на персональный компьютер, где координаты положения руки сравниваются со средненулевыми координатами. В результате их вычитания курсор на экране смещается согласно изменению положения руки пользователя. Также возможно определить дополнительные жесты пользователя, связанные с нажатием левой и правой кнопки мыши, прокручиванием экрана. Отклик на такие воздействия реализуется с использованием аппаратной и программной частей.
Прототип TouchSpaceна отладочной плате
В настоящее время на отладочной плате создан рабочий прототип устройства, представленный на рисунке 3.
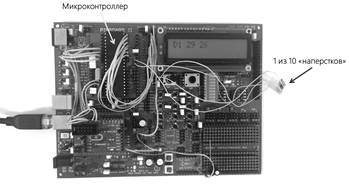
Рис. 3. Реализация TouchSpace на отладочной плате
Для функционирования прототипа TouchSpace, была написана программа на C++, позволяющая обрабатывать данные с микроконтроллера и перемещать курсор по экрану.
На рисунке 4 представлен график зависимости координаты Y, приходящей с датчика, от времени.

Рис. 4. График зависимости координаты Y от времени
Проанализировав график, можно сделать вывод, что в поступающем сигнале много шума, который не позволяет перемещать курсор по экрану с ожидаемой точночтью.
Решение описанной выше проблемы — применение фильтрации к поступающему в программу сигналу.
В данной работе для устранения шума в сигнале был применен фильтр Калмана. На рисунке 6 отражена зависимость координаты Y от времени с применением фильтрации.
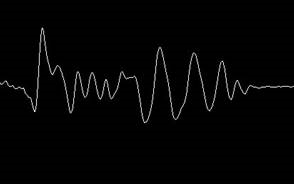
Рис. 5. График зависимости координаты Y от времени с применением фильтра Калмана
Полученная зависимость координаты Y от времени не имеет резких перепадов значений, которые наблюдались в графике зависимости координаты от времени без применения фильтра. Как результат курсор на экране перемещается плавно, что позволяет с комфортом управлять компьютером.
Область применения
Разрабатываемое устройство TouchSpace найдет широкое применение среди молодого поколения, не боящегося начать использовать что-то принципиально новое. Кроме того, устройство будет интересно любителям и разработчикам компьютерных игр, так как управление жестами подразумевает более широкий функционал манипулятора, по сравнению с аналогами.
Заключение
К лету 2015 года планируется собрать готовый образец устройства, способный обрабатывать различные жесты пользователя, вызывающие такие важные события как клики левой и правой кнопок мыши, масштабирование и перемещение объектов на экране, сворачивание окон и другое.
Обучение устройства различным жестам позволит сделать работу с компьютером простой и непринужденной, не требующей использования какой-либо поверхности.
Дизайн и изготовление корпуса для TouchSpace также является не менее важным вопросом, так как внешний вид устройства является визитной карточкой продукта.
В связи с этим необходимо продолжить работы по улучшению точности позиционирования курсора на экране, начать обучение устройства различным жестам, а также заняться проектированием и печатью корпуса на 3D принтере.
Литература:
1. SkyMouse [Электронный ресурс]. — Режим доступа: https://www.kickstarter.com/projects/eephrati/skymouse, свободный;
2. Изготовление печатных плат [Электронный ресурс]. — Режим доступа: http://cxem.net/master/11.php, свободный.
