




Предлагаемый комбинированный рабочий орган (рисунок 1), согласно изобретению, представляет собой совокупность серийной стрельчатой лапы культиватора КРТ-3 и черенкового ножа криволинейной формы, радиус кривизны которого переменный, имеющий большее значение в его передней части для обеспечения свободного скольжения ножа по поверхности препятствия, причем криволинейный нож установлен ниже опорной поверхности лемешного рабочего органа [1].
К параметрам, определяющим работоспособность рабочего органа относятся: угол вхождения ножа в почву и его толщина; ширина захвата стрельчатой лапы, площадь критического сечения крыла лапы. Пределы варьирования и шаг были приняты следующие: угол вхождения черенкового ножа αуст — 90…130° с шагом 10°; толщина ножа вн — 4…12 мм с шагом 2 мм; ширина захвата лапы вл — 260…360 с шагом 25 мм и площадь
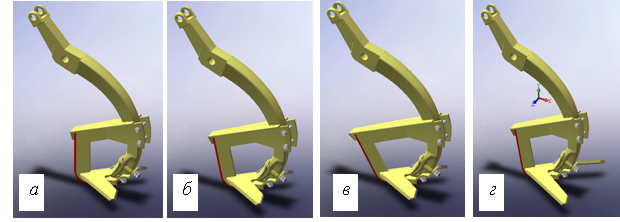
Рис. 1. Твердотельные модели экспериментального рабочего органа с различными параметрами: а — αуст=90о, вн=260 мм; б — αуст=110о, вн=260 мм; в — αуст=130о, вн=260 мм; г — αуст=110о, вн=360 мм
При решении задачи оптимизации параметров черенкового ножа находились экстремумы следующих четырех частных критериев оптимизации. В качестве первого из них использовалась критическая сила Fmaxн (αуст, вн), по достижении которой происходит разрушение конструкции.
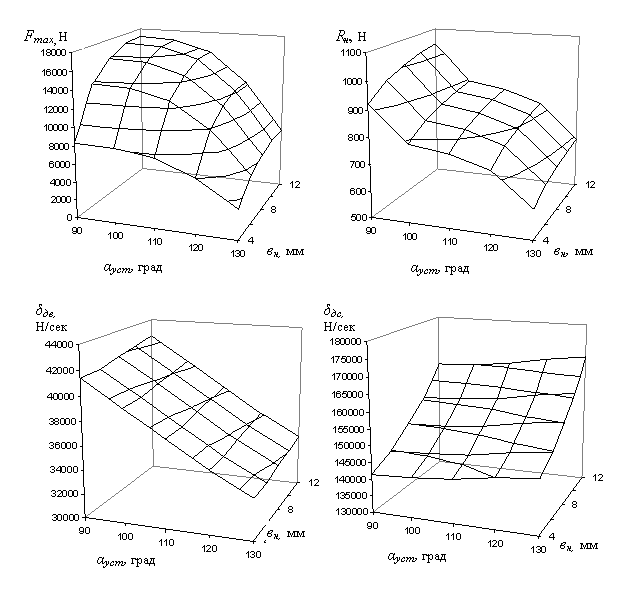
Рис. 2. Поверхности отклика к оптимизации параметров черенкового ножа
В процессе оптимизации необходимо максимизировать Fmaxн (αуст, вн)= к1 (αуст, вн) путем подбора факторов (αуст, вн). В процессе работы устойчивость рабочего органа по глубине обработки зависит в первую очередь от его тягового сопротивления. С его ростом необходимо увеличивать величину упругого момента создаваемого пружинами предохранительного механизма на стойке рабочего органа. Это ведет к росту динамических нагрузок при преодолении препятствия. Поэтому вторым критерием выбираем тяговое сопротивление Rн (αуст, вн) рабочего органа. Его необходимо минимизировать Rн(αуст, вн)= к2 (αуст, вн) путем подбора факторов (αуст, вн). Динамические нагрузки на рабочий орган при въезде на препятствие зависят в основном от угла установки черенкового ножа, а при сходе с пня значительное влияние оказывает как толщина, так и угол установки ножа. Поэтому выделим отдельно третьим критерием абсолютный показатель динамики при въезде на препятствие δдв (αуст, вн), а четвертым критерием абсолютный показатель динамики при сходе с препятствия δдс, (αуст, вн).
Оба этих параметра δдв (αуст, вн)= к3 (αуст, вн) и δдс, (αуст, вн) = к4 (αуст, вн) необходимо минимизировать путем подбора факторов (αуст, вн).
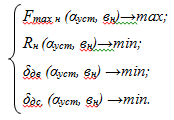
То есть необходимо решить следующие задачи оптимизации:
В каждой точке проводили отдельный компьютерный эксперимент, при этом общее количество экспериментов, позволяющее получить функцию двух переменных, было равным 5 х 5 = 25 для каждой из функций.
Анализируя каждую из поверхностей отклика (рисунок 2), представленную с помощью линий уровня, можно условно разделить факторное пространство на две области: благоприятную (не заштрихована), в которой критерий оптимизации принимает искомые значения, и неблагоприятную (заштрихована). При этом учитывается, что благоприятная область должна занимать значительную долю факторного пространства (10…20 %)
В качестве границ между благоприятной и неблагоприятной областями выбраны следующие изолинии: для функции Fmax(αуст, вн) изолиния 10800 Н (соответствует трехкратному запасу прочности); для Rн(αуст, вн) изолиния 1000 Н (большее сопротивление сделает неустойчивым рабочий орган по глубине обработки, при данном преднатяжении пружин); для δдв (αуст, вн) изолиния 38000 Н/сек (минимально возможное значение); для δдс, (αуст, вн) изолиния 150000 Н/сек (минимально возможное значение). Анализ конфигурации благоприятных областей в факторном пространстве (αуст, вн) позволяет сделать следующие выводы (рисунок 3):
- оптимальный угол установки черенкового ножа составляет от 105 до 120 град при его толщине от 5 до 7 мм;
- целесообразно использовать по возможности меньшие углы наклона черенкового ножа, так как это увеличивает прочность конструкции;
- тот факт, что оптимальная область занимает значительную площадь факторного пространства (αуст, вн) свидетельствует о том, что даже при существенном изменении условий эксплуатации рабочий орган будет выполнять свои функции.
Рис. 3. Благоприятные области факторного пространства (αуст, вн) (незаштрихованы) на поверхностях отклика, представленных линиями уровня
При решении задачи оптимизации стрельчатой лапы находились экстремумы двух частных критериев оптимизации. В качестве первого из них использовалась критическая сила Fmaxл (Sл,, вл), по достижении которой происходит разрушение стрельчатой лапы в области основания крыла. В процессе оптимизации необходимо максимизировать Fmaxл (Sл,, вл)= к1 (Sл,, вл) путем подбора факторов (Sл,, вл). Вторым критерием выбираем тяговое сопротивление Rл(Sл, вл) рабочего органа. Его необходимо минимизировать Rл(Sл,, вл)= к2 (Sл,, вл) путем подбора факторов (Sл,, вл), для обеспечения стабильности рабочего органа по глубине обработки.
То есть необходимо решить следующие задачи оптимизации:
Рис. 4. Поверхности отклика к оптимизации параметров стрельчатой лапы
В качестве границ между благоприятной и неблагоприятной областями выбраны следующие изолинии: для функции Fmax (Sл,, вл) изолиния 3900 Н (соответствует двухкратному запасу прочности); для Rл (Sл,, вл) изолиния 1000 Н (большее сопротивление сделает неустойчивым рабочий орган по глубине обработки, при данном преднатяжении пружин).
Анализ конфигурации поверхностей отклика (рисунок 4) и благоприятных областей в факторном пространстве (Sл,, вл) (рисунок 5) позволяет сделать следующие выводы:
- оптимальная ширина захвата стрельчатой лапы составляет от 260 мм 270 мм при площади поперечного сечения критической области основания стрельчатой лапы от 660 до 710 мм2;
- целесообразно использовать стрельчатую лапу с шириной захвата 260 мм, что соответствует ширине захвата серийной лапы культиватора КРТ-3 и позволяет рационально расположить секции по раме с обеспечением зон перекрытия.
Рис. 5. Благоприятные области факторного пространства (Sл,, вл) (незаштрихованы) на поверхностях отклика, представленных линиями уровня
Литература:
1. Пат. 2319329 РФ, МКИ A01B49/02, 76/00. Комбинированное почвообрабатывающее орудие [Текст] / И. М. Бартенев,М. Н. Лысыч, А. А. Кузнецов; заявитель и патентообладатель ВГЛТА. — № 2006127356/12; заявл. 27.07.2006; опубл. 20.03.2008, Бюл. № 12. — 3 с.
2. Лысыч, М. Н. Использование систем твердотельного моделирования и инженерных расчетов при проектировании и испытании почвообрабатывающих орудий [Текст] / М. Н. Лысыч, // Вестн. КрасГАУ. − 2010. − № 1 − С. 194–198.
3. Лысыч М. Н. Применение метода конечных элементов для прочностных расчетов рабочих органов почвообрабатывающих орудий [Текст] / М. Н. Лысыч // Математическое моделирование, компьютерная оптимизация технологий, параметров оборудования и систем управления: межвуз. сб. науч. тр. под ред. В. С. Петровского; Фед. агенство по образованию, ГОУ ВПО «ВГЛТА». — Воронеж, 2009. — Вып. 14. С 86–90.
4. Аттетков, А. В. Введение в методы оптимизации: учеб. / А. В. Аттетков, В. С. Зарубин, А. Н. Канатников. — М.: Финансы и статистика; ИНФРА-М, 2008. — 272 с.: ил.
