




Рассматриваются режим работы компенсатора типа статком при симметрировании несбалансированной нагрузки. Основное внимание уделено синтезу системы автоматического управления. Приводится методика определения коэффициентов регуляторов.
Ключевые слова: статком, компенсатор реактивной мощности, симметрирование трёхфазной нагрузки
Основным документом, регламентирующим требования к качеству электроэнергии на территории РФ, является ГОСТ Р 54149–2010 «Нормы качества электрической энергии в системах электроснабжения общего назначения» (введён в действие с 01.01.2013 г.). ГОСТ устанавливает показатели и нормы качества электроэнергии в точках передачи электрической энергии пользователям электрических сетей низкого, среднего и высокого напряжений систем электроснабжения общего назначения переменного тока частотой 50 Гц.
Протекание несимметричных токов в сетях общего назначения приводит к возникновению несимметрии напряжений и является причиной нарушения одного из показателей качества электроэнергии — коэффициента несимметрии напряжений по обратной последовательности  . Допустимое значение коэффициента несимметрии напряжений по обратной последовательности составляет 2 %, предельное — 4 %. В условиях, когда соизмеримы мощности источника и приёмника электроэнергии, несимметричный ток приведёт к искажению питающего напряжения вплоть до шин генераторов.
. Допустимое значение коэффициента несимметрии напряжений по обратной последовательности составляет 2 %, предельное — 4 %. В условиях, когда соизмеримы мощности источника и приёмника электроэнергии, несимметричный ток приведёт к искажению питающего напряжения вплоть до шин генераторов.
Традиционно симметрирование токов в трёхфазных сетях осуществлялось путём с помощью конденсаторных батарей, соединённых по схеме треугольника [1]. Недостатком такого способа является сложность выбора конденсаторов для разных случаев несимметрии. Кроме того дополнительная функция данного варианта — это генерирование реактивной мощности в сеть, поэтому для одних случаев эта дополнительная функция является положительной, а для других — отрицательной.
Так же известны устройства симметрирования на базе встречно-параллельных тиристоров и последовательно включённого к ним дросселя [2]. Недостатком такого устройства является искажение формы кривой тока и значительное потребление реактивной мощности.
Развитие элементной базы силовой электроники и новых методов высокочастотной модуляции привели к созданию нового класса устройств, улучшающих качество электроэнергии [2]. В зависимости от требуемых функций такие преобразователи получили различные названия: активные фильтры, статические компенсаторы реактивной мощности (статком), сетевые инверторы, кондиционеры сети.
В основе всех вышеназванных устройств по своей сути лежит схема трёхфазного (однофазного) автономного инвертора напряжения или тока, построенного либо на IGBT или MOSFET транзисторах, либо на IGCT или GTO тиристорах. Применение полностью управляемых полупроводниковых приборов позволяет создавать требуемые компенсирующие токи с малым содержанием высших гармонических составляющих за счёт использования методов широтно-импульсной модуляции.
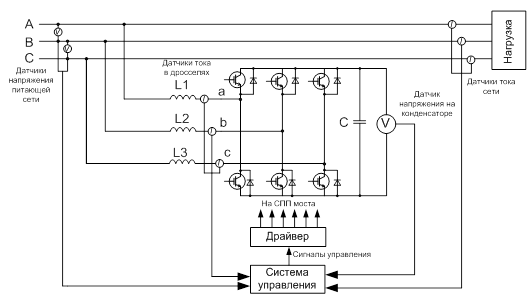
Рис. 1. Схема силовых цепей статком
Анализ литературы по данному вопросу показал, что на сегодняшний день не исследованным остался вопрос о применении вышеназванных типов преобразователей в качестве устройств, снижающих несимметрию потребляемых тяговой подстанцией токов. В связи с этим актуальной научной задачей является разработка системы управления статком в режимах симметрирования нагрузки. Решению данной задачи и посвящена настоящая статья.
Рассмотрим структуру и функционирование системы управления статком для режима симметрирования нагрузки. На рис. 2 представлена функциональная схема разработанной системы. Контуры регулирования координат образуют концентрическую систему, в которой каждый внутренний контур управляется сигналом от внешнего контура, т. е. является подчиненным по отношению к нему. В электроприводе такие системы строятся по принципу подчинённого регулирования координат.
Внешний контур — это контур регулирования напряжения на выходном конденсаторе. Как правило, используется ПИ-регулятор напряжения (РН). На вход РН поступает разность сигнала задания напряжения на конденсаторе и сигнала текущего напряжения на конденсаторе с датчика напряжения (V1). На выходе регулятора напряжения получаем значение d-составляющей тока статком  , которая обеспечит заряд конденсатора до требуемого уровня напряжения. Внутренний подчинённый контур — это контур регулирования тока сети. Регулирование осуществляется по двум проекциям на оси системы координат dq, вращающейся с круговой частотой сети [3]. Ось 0d этой системы координат с помощью блока синхронизации совмещается с обобщённым вектором фазного напряжения сети.
, которая обеспечит заряд конденсатора до требуемого уровня напряжения. Внутренний подчинённый контур — это контур регулирования тока сети. Регулирование осуществляется по двум проекциям на оси системы координат dq, вращающейся с круговой частотой сети [3]. Ось 0d этой системы координат с помощью блока синхронизации совмещается с обобщённым вектором фазного напряжения сети.
Датчики тока A1, A2 (третий ток вычисляется из условия равенства нулю суммы токов) измеряют фазные токи нагрузки, из которых выделяется основная гармоника ia(1), ib(1), ic(1). Компенсирующие токи находятся путём выделения соответствующих составляющих ( ) из проекций обобщённого вектора токов нагрузки Id(1), Iq(1) с помощью блока выделения. Далее сигнал
) из проекций обобщённого вектора токов нагрузки Id(1), Iq(1) с помощью блока выделения. Далее сигнал  поступает на сумматор С2, где складывается с сигналом .
поступает на сумматор С2, где складывается с сигналом .
В цепи обратной связи по току предусмотрен преобразователь координат ПК1 вектора токов преобразователя, измеряемых датчиками тока A3 иA4 (третий ток вычисляется из условия равенства нулю суммы токов). В координатном преобразователе тока ПК2 осуществляется переход от проекций обобщённого вектора тока преобразователя на оси вращающейся системы координат. Сигналы о значении токов преобразователя Idп, Iqп поступают на сумматоры С3 и С4, на выходе которых получаем значение рассогласования между заданным компенсирующим током и реальным в цепи преобразователя. Регулирование осуществляется по двум проекциям на оси системы координат dq. На выходе регуляторов тока получаем значение напряжений статком ( ), обеспечивающих формирование требуемых компенсационных токов, в двухфазной системе координат.Впреобразователе координат ПКЗ осуществляется переход от двухфазной вращающейся () к трёхфазной системе координат (
), обеспечивающих формирование требуемых компенсационных токов, в двухфазной системе координат.Впреобразователе координат ПКЗ осуществляется переход от двухфазной вращающейся () к трёхфазной системе координат ( ). На вход ШИМ-модулятора поступают трёхфазные изменяющиеся по синусоидальному закону с частотой сети модулирующие сигналы . На выходе ШИМ модулятора формируются коммутационные функции FпА, FпB, FпC и на основании их импульсы напряжения, подаваемые на ключи силового преобразователя.
). На вход ШИМ-модулятора поступают трёхфазные изменяющиеся по синусоидальному закону с частотой сети модулирующие сигналы . На выходе ШИМ модулятора формируются коммутационные функции FпА, FпB, FпC и на основании их импульсы напряжения, подаваемые на ключи силового преобразователя.
В теории автоматического управления для замкнутого контура с передаточной функцией  известны различные критерии оптимизации с помощью настройки регулятора, последовательно включённого с объектом управления [5, 6]. Широкое применение для настройки регуляторов, управляющих различными преобразователями, в том числе автономными инверторами в электроприводе нашёл метод коррекции, называемый динамическим, или модульным оптимумом [5, 6].
известны различные критерии оптимизации с помощью настройки регулятора, последовательно включённого с объектом управления [5, 6]. Широкое применение для настройки регуляторов, управляющих различными преобразователями, в том числе автономными инверторами в электроприводе нашёл метод коррекции, называемый динамическим, или модульным оптимумом [5, 6].
Настройка регулятора САУ на модульный оптимум (МО) означает придание ей свойств фильтра Баттерворта, что существенно упрощает синтез САУ. В радиотехнике и связи фильтры Баттерворта используются потому, что их частотная характеристика близка к прямоугольной, что позволяет осуществлять избирательный прием сигналов от разных радиостанций. Чем выше порядок фильтра, тем лучше избирательность. Прямоугольность частотной характеристики для САУ не является важнейшим свойством. Для САУ важнее обеспечить требуемое время переходного процесса и минимизировать ошибки переходного и установившегося режимов. Фильтры Баттерворта первых порядков имеют неплохие в этом смысле характеристики, поэтому они и используются в качестве цели при синтезе САУ. Фильтр Баттерворта любого порядка устойчив. Это значит, что при настройке САУ на модульный оптимум отпадает необходимость проверки ее устойчивости.
Известно, что для настройки на технический оптимум передаточная функция всей замкнутой системы с одним контуром управления должна быть равна [5,6]:
 (1)
(1)
где Tµ — постоянная времени такой части объекта управления, которая характеризуется малой инерционностью, обусловленной фильтрами датчиков и преобразователей сигналов, ШИМ-модулятором и т. д.
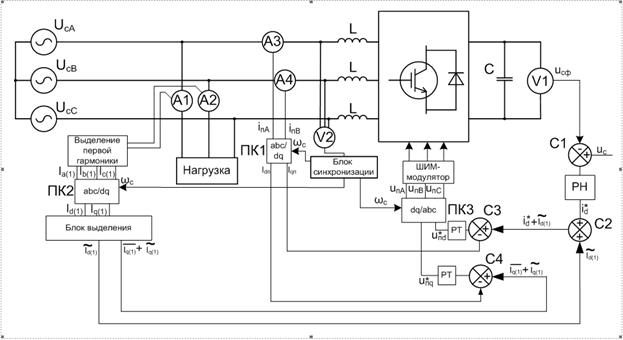
Рис. 2. Функциональная схема САУ статком
Из (1) можно получить передаточную функцию разомкнутой системы:
 (2)
(2)
Передаточная функция статком из [4] при пренебрежении влиянием перекрёстных связей равна:
 , (3)
, (3)
где T0 — постоянная времени статком со стороны цепи переменного тока.
 .
.
Из (2) и (3) можно найти передаточную функцию регулятора тока:
 (4)
(4)
Контур напряжения на нагрузке является внешним по отношению к контуру тока.
При настройке контура напряжения на модульный оптимум желаемая передаточная функция замкнутой системы будет иметь вид [5,6]:
 (5)
(5)
где  – характеристический полином оптимизированного замкнутого контура тока.
– характеристический полином оптимизированного замкнутого контура тока.
Передаточная функция разомкнутого контура регулирования напряжения в соответствии с [4] имеет вид:
 (6)
(6)
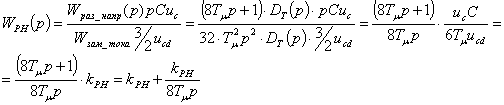
Из формул (5) и (6) определяем тип и параметры регулятора напряжения:
 (7)
(7)
Таким образом, для получения модульного оптимума в контуре регулирования напряжения требуется П-регулятор. Для получения астатического регулирования напряжения может быть использована настройка системы с помощью ПИ-регулятора, которая называется настройкой на симметричный оптимум. Этому названию соответствует симметричная относительно точки частоты среза ЛАЧХ оптимизированного разомкнутого контура. Передаточная функция разомкнутой системы при этом должна быть равна [4,5]:
 (8)
(8)
Передаточная функция регулятора напряжения с учётом (5), (7), (8) определяется как:
 (9)
(9)
Для переходных характеристик систем, настроенных на симметричный оптимум характерно значительное перерегулирование, что в ряде случаев может быть недопустимо. Значительное перерегулирование связано с наличием в числителе (9) форсирующего звена 1-го порядка. Для того чтобы компенсировать влияние этого звена необходимо использовать фильтр на входе системы по задающему воздействию [4,5]. Передаточная функция фильтра имеет вид:
 (3.26)
(3.26)
Вывод
Разработана система управления статком для режима симметрирования трёхфазной нагрузки по методу подчинённого регулирования координат с двумя контурами. Установлено, что настройку на динамический оптимум внутреннего контура обеспечивает ПИ-регулятор, а внешнего контура — П-регулятор, что не обеспечивает астатического регулирования внешнего контура. Разработанная система управления статического компенсатора реактивной мощности обеспечивает снижение токов обратной последовательности в сетях общего назначения.
Литература:
1. Шидловский А. К., Федий В. С. Регулируемые источники реактивной мощности / А. К. Шидловкий, В. С. Федий // Электричество. — 2009. — № 1. С.15–20.
2. Кочкин В. И. Применение статических компенсаторов реактивной мощности в электрических сетях энергосистем и предприятий / Кочкин В. И., О. П. Нечаев. — М.: Изд-во НЦ ЭНАС, 2002. — 248 с.
3. Кузьмин С. В., Марикин А. Н., Виноградов С. А. Применение преобразования Парка-Горева для управления статическим компенсатором реактивной мощности тяговой сети переменного тока //Вестник РГУПС. — 2013. — № 2. С. 47–54.
4. Шрейнер Р. Т., Ефимов А. А. Активный фильтр как новый элемент энергосберегающих систем электропривода / Р. Т. Шрейнер, А. А. Ефимов // Электричество.— 2000. — № 3. — С. 46–54.
5. Ким Д. П. Теория автоматического управления. Т.1. Линейные системы / Д. П. Ким. — М.: Физматлит, 2007. — 288 с.
6. Терехов В. М. Системы управления электроприводов /В. М. Терехов, О. И. Осипов. — М.: Академия, 2005. — 300 с.
