Введение
В рамках реализации национального проекта «Развитие многоспутниковой орбитальной группировки» [1], предусматривающего развёртывание к 2030 году системы из 650 аппаратов, критически возрастает роль автономности бортовых систем. Существующая зависимость от наземного комплекса управления (НКУ) приводит к задержкам в реагировании и повышает риски потери космических аппаратов (КА).
Цель работы — разработка и верификация методики сокращения времени восстановления КА за счёт создания децентрализованной гибридной интеллектуальной системы на базе агентных технологий.
Научная новизна исследования заключается в:
– Внедрении рекуррентной сценарно-ситуационной модели агентного взаимодействия;
– Разработке адаптивного алгоритма обнаружения аномалий на основе дисперсионного анализа с контролем FPR;
– Количественном сравнении эффективности многоагентных систем и нейросетей в условиях ограниченных ресурсов.
Практическая значимость подтверждается возможностью применения разработок на малых КА (объём памяти <12 КБ), что повышает надёжность миссий и снижает нагрузку на НКУ. Среди существующих подходов к автономной диагностике (пороговые, статистические, ML и многоагентные методы) в статье обоснована перспективность именно многоагентного подхода.
- Анализ временных параметров при принятии решения на восстановление работоспособности космического аппарата
Активное развёртывание многоспутниковых орбитальных группировок, являющееся ключевым направлением национального проекта «Развитие многоспутникового орбитального группировки», неизбежно влечёт за собой усложнение управления космическими аппаратами и увеличение нагрузки на наземные комплексы управления. Как отмечалось во введении, централизованная модель диагностики, при которой все решения по восстановлению работоспособности принимаются исключительно на Земле, становится неэффективной в условиях ограниченной радиовидимости, растущего объёма телеметрической информации и жёстких требований к оперативности реагирования на отказы. В этих условиях крайне важно провести детальный анализ временных затрат, связанных с процессом восстановления, чтобы выявить узкие места существующей системы и обосновать необходимость перехода к интеллектуальным автономным решениям на борту космических аппаратов.
Время штатного цикла управления можно записать в виде:

где




Для полного восстановления функционирования бортовых систем (БС) и корректировки программы управления требуется проведение трех сеансов управления [2], что можно представить как

На основании проведённого расчета времени восстановления аппарата можно сделать вывод, что существующая система мониторинга технического состояния не обеспечивает необходимую оперативность локализации ошибок. В частности, предусмотренное нормативное значение восстановления, равное 6 часам, явно уступает фактическому минимуму, составляющему 10 часов, что свидетельствует о риске несвоевременного реагирования на нештатные ситуации и деградации бортового оборудования. Поэтому возникает необходимость разработки нового подхода или создания научного аппарата, в который будет интегрирована интеллектуальная технология для быстрого и точного обнаружения и устранения отказов.
Данное решение должно позволит сократить время реакции на аномалии, повысить надежность работы космического оборудования и обеспечить его безопасность в условиях ограниченной доступности наземного управления
2. Методика обнаружения и локализации отказов бортовой аппаратуры космического аппарата с использованием агентной технологии
Для решения этой проблемы необходимо перейти от централизованной модели мониторинга к распределённой интеллектуальной системе, способной автономно обнаруживать, анализировать и устранять отказы непосредственно на борту космического аппарата. Одним из наиболее перспективных подходов является использование агентной технологии, позволяющей реализовать гибридную систему мониторинга с высокой степенью адаптивности, устойчивости и автономности.
Этап 1. Построение рекуррентной модели обнаружения и локализации отказов БС КА с применением агентной технологии.
В настоящее время для решения практических задач применяются различные интеллектуальные технологии, такие как нейросети, многоакцентные системы (МАС), байесовские сети и др. В работе для решения задачи мониторинга технического состояния БС КА выбраны многоагентные системы, так как они имеют ряд преимуществ, таких как: дистрибуция, адаптивность, устойчивость к сбоям и интерактивность.
«Агент» представляет собой автономный вычислительный элемент, способный взаимодействовать с другими агентами, отвечающими за функциональность определенной системы, они обладают целями, способностями и знаниями и могут принимать решения и выполнять действия в соответствии с заданными правилами и условиями, а также служат для сбора и анализа данных и выполнения других задач, требующих координации и взаимодействия между различными вычислительными элементами.
Процесс функционирования бортовой системы с применением агентной системы опишем моделью конечного автомата с вероятностными переходами. Состояние системы в момент времени


где



Решение о переходе в аварийное состояние


где

Динамика диагностических параметров:

Где



Отображение события в набор команд:

Где




Формирование команды восстановления агентом восстановления определяется продукционным правилом:

где

Таким образом, основа всей методики, представлят процесс диагностики как управляемую последовательность событий, в которой агенты, действуя автономно, анализируют данные, принимают решение о сбое и инициируют корректирующие действия, что обеспечивает высокую скорость реакции системы.
Этап 2. Создание модели многоагентной системы
2.1 Непрерывный мониторинг и анализ параметров в реальном времени включают активацию резерва и генерацию аварийных пакетов [4], при этом сжатый пакет информации о техническом состоянии космического аппарата формируется и передается в наземный комплекс управления (НКУ) после завершения сеанса управления. Поскольку тестовый контроль бортовых систем осуществляется только после анализа данных в НКУ, что сопряжено с дополнительными временными затратами, процедура предполагает переход аппарата в режим ожидания для поддержания минимальной функциональности, анализ телеметрии с использованием алгоритмов машинного обучения для выявления скрытых дефектов и выдачу команд для проведения целевых тестов. Математическое обоснование метода базируется на статистической обработке случайных величин. Для каждой контролируемой переменной



Для выявления аномалий используется критерий отклонения от номинального режима:

где



Вероятностное пространство разделяется на области, где превышение параметрами установленного порога интерпретируется как индикатор потенциального отказа, что позволяет реализовать проактивные действия в ходе мониторинга технического состояния и предотвратить выход бортовой системы из строя.
Для обеспечения надёжности вместо поправки Бонферрони, которая может увеличить вероятность пропуска отказа (ошибка II рода), применяется метод последовательного анализа (CUSUM) или подтверждение аномалии на нескольких последовательных тактах опроса. Это позволяет отфильтровать случайные выбросы, сохраняя высокую чувствительность к трендам деградации. Для обнаружения недопустимых отклонений в бортовой системе космического аппарата предлагается система, использующая пять программных агентов на борту. Агенты работают параллельно в рамках операционной системы реального времени (ОСРВ), обмениваясь данными через очереди сообщений.
Примечание по аппаратной реализации: в рамках данной экспериментальной модели агенты размещены на едином высокопроизводительном бортовом вычислительном модуле. Однако архитектура МАС допускает масштабирование: агенты могут быть деплоены на физически разнесённые вычислительные узлы (например, отдельные микроконтроллеры подсистем), что позволит реализовать аппаратную отказоустойчивость. В текущей конфигурации устойчивость к программным сбоям обеспечивается механизмом watchdog-таймеров для каждого агента и возможностью перезапуска отдельных программных модулей без перезагрузки всей системы. Все агенты взаимодействуют через стандартные интерфейсы обмена данными (CAN или SpaceWire), что обеспечивает совместимость с распределённой архитектурой будущего поколения. Распределение ролей между агентами выглядит следующему:
Агент мониторинга (AM)
Этот агент является «сенсорным слоем» системы. Он встроен в каждый контролируемый модуль (БЦВМ, система термоконтроля, блок питания) и выполняет непрерывный сбор телеметрической информации. С заданной частотой AM считывает текущие значения и сохраняет последние 60 измерений каждого параметра в локальный буфер. Его задача: обеспечить непрерывный и надёжный поток «сырых» данных для последующего анализа, не внося при этом собственных решений.
Агент Предварительного Анализа (APA)
Этот агент является исполнителем процедур, описанных в разделе «Использование дисперсионного анализа». APA получает потоки данных от всех AM и выполняет расчёт статистик, а также применяет F-теста: APA сравнивает текущую дисперсию с базовой (нормативной), полученной в ходе валидации системы. Если дисперсия превышает допустимый порог, это указывает на увеличение разброса значений — ключевой признак надвигающегося отказа. Дополнительной задачей является контроль ложных срабатываний: для обеспечения надёжности APA применяет поправку Бонферрони. Если F-тест показывает статистически значимое увеличение дисперсии, APA немедленно генерирует сигнал ALERT и передаёт его Агенту Локализации (AL).
Агент Локализации (AL)
Получив сигнал ALERT от APA, AL берёт на себя задачу интерпретации статистических данных. Он анализирует вклад каждого параметра в общую картину аномалии, вычисляя метрику


Агент Восстановления (AR) — реализация управляющих воздействий.
AR получает от AL сформулированную гипотезу и обращается к своей базе знаний — набору продукционных правил. Каждое правило связывает диагностированную неисправность с конкретной последовательностью восстановительных действий. Например, при гипотезе «перегрев

Координирующий агент (AK)
Находится в центральном модуле и следит за глобальным состоянием КА и разрешает конфликты: если два AR одновременно хотят переключить один и тот же ресурс — AK решает, кто первый. Формирует сводный отчёт только в случае критической аномалии и отправляет его на Землю.
Таким образом, дисперсионный анализ не является абстрактной математической процедурой, а представляет собой функциональную цепочку, реализуемую совместной работой пяти специализированных агентов: от сбора данных (AM) через статистическое обнаружение аномалии (APA) её локализации (AL) и физического восстановления (AR), контролируемая (AK). Эта распределённая архитектура позволяет проводить сложный статистический анализ в реальном времени непосредственно на борту КА, минуя задержки, связанные с передачей данных на Землю, и обеспечивая требуемую оперативность восстановления.
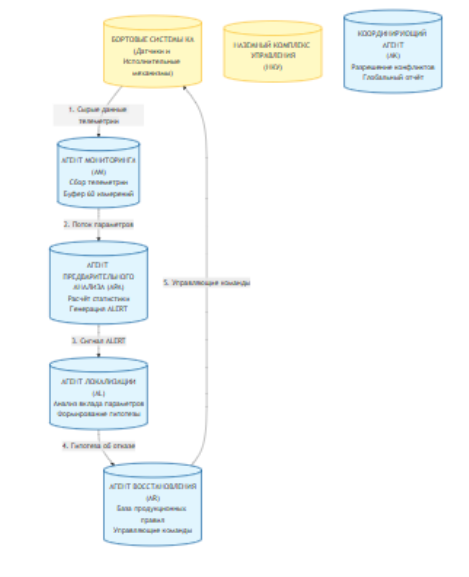
Рис 5. Контроль технического состояния
Структура времени восстановления (



где


Уровень автономности: для некритических отказов система действует полностью автономно в контуре 18 минут. Для критических отказов сформированная рекомендация передаётся оператору ЦУП для подтверждения, либо выполняется в автоматическом режиме с последующим уведомлением.
Сравнительная эффективность:
Традиционная методика (анализ в ЦУП + сеанс связи): ~600 минут (обусловлено расписанием сеансов и ручной обработкой).
Предлагаемая методика (бортовой анализ + автономное действие): ~160 минут (включая физические процессы стабилизации).
Таким образом, сокращение времени обусловлено исключением задержки на ожидание сеанса связи для первичной диагностики и автоматизацией формирования команд восстановления. Внедрение данной методики сократило время восстановления БС в среднем до 160 минут, что соответствует требованиям эксплуатационной документации. Кроме того, внедрение такой методики позволяет выявить наиболее уязвимые системы и, кроме того, парировать отказы до момента их наступления. Таким образом, автономная система контроля значительно упрощает работу специалистов и освобождает их от необходимости выполнять трудоемкие и монотонные процедуры исследования. Анализ, проводимый оператором боевого расчета, переносится на борт космического аппарата, при этом осуществляется двойной контроль выполнения целевой задачи, что позволяет более точно исследовать состояние КА с учетом оставшихся ресурсов, предварительно определить фактические характеристики оборудования, выявить и понять основу протекающих процессов и аномалий в системе КА.
Заключение
В данной статье был проведен метод мониторинга отказов бортовой системы и была предложена реализация путей решения, описанная математически. Выявлена проблематика и сформулирована задача исследования, а также представлено решение данной проблемы, а именно представлена методика повышения оперативности обнаружения и локализации отказов в БС, которая позволяет обнаружить аномалии в работе бортовой аппаратуры в процессе непосредственной эксплуатации.
Таблица 1
|
Критерий |
Классический метод |
Предложенный гибрид |
|
Среднее время восстановления |
≈ 600 мин (норматив 360 мин) |
158 ± 12 мин |
|
Время обнаружения |
Минуты–часы |
8 мс (IF на борту) |
|
Зависимость от радиовидимости |
Критична |
Снижена (локальная логика при отсутствии связи) |
|
Объём передаваемых данных |
Полная телеметрия |
Только EOI + буфер |
|
Нагрузка на операторов НКУ |
Высокая (ручной анализ) |
Минимальная (оповещение только при EOI) |
|
Применимость к МКА |
Ограничена (требуются мощные НКУ) |
Высоко применима (ресурсы <12 КБ) |
Кроме того, внедрение интеллектуальных систем исследовательский мониторинга в бортовую аппаратуру упрощает задачи личного состава боевых расчетов, освобождая их от сложных и рутинных процедур контроля. Это, в свою очередь, сокращает время, требуемое для анализа технического состояния КА. Перенос функций контроля на интеллектуальные бортовые системы позволяет проводить более глубокий анализ состояния аппарата, точно определять реальные характеристики оборудования с учетом оставшихся ресурсов, а также выявлять и диагностировать нежелательные процессы и аномалии в работе компонентов КА. Таким образом, развитие и интеграция интеллектуальных технологий наблюдения становятся ключевыми факторами повышения надежности и эффективности управления космическими аппаратами.
Литература:
- Дмитриев А. К., Принципы алгебраического агрегирования в задачах диагностирования / А. К. Дмитриев // Изв. вузов. Приборостроение. — 1997. — Т. 40, № 8. — 5–13 с.
- Калинин В. Н., Кулаков А. Ю., Павлов А. Н., Потрясаев С. А., Соколов Б. В. Информатика и автоматизация. 2021. Т. 20. № 2. С. 236–269.
- Wooldridge, M. An Introduction to MultiAgent Systems / M. Wooldridge. — 2nd ed. — Chichester: John Wiley & Sons, 2009. — 488 p.
- Горячев А. В. Методы и средства функционального контроля бортовых систем космических аппаратов / А. В. Горячев, С. И. Зиновьев // Известия Российской академии наук. Теория и системы управления. — 2018. — № 4. — С. 152–161.
- Баранов С. Н. Интеллектуальные системы управления на основе продукционных моделей / С. Н. Баранов, Л. А. Мельников // Известия СПбГЭТУ «ЛЭТИ». — 2019. — № 6. — С. 34–41.

