




Рассмотрены модули пассивной идентификации пакета по многокритериальному исследованию систем управления. Приведен пример пассивной идентификации. Рассмотрен класс объектов, для которых рассмотренный подход себя оправдывает.
Одной из составляющих пакета по многокритериальному анализу систем управления является модуль пассивной идентификации объекта управления. Основная форма модуля приведена на рисунке 1.
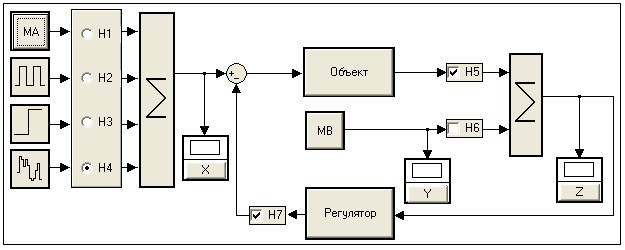
Рис. 1. Основная форма модуля
Суть заключается в следующем. При нажатии на кнопку «МА» открывается окно, позволяющее ввести значения входного сигнала системы (сигнал в точке X). Окно приведено на рисунке 2.
Введенные значения можно сохранить в файле, открыть из файла (тренда) и т. д. Аналогичное окно открывается при нажатии на кнопку «МВ» для введения значений выходного сигнала (сигнал в точке Y).
Задача заключается в формировании такой передаточной функции объекта управления при известных настроечных параметрах регулятора, чтобы сигнал на выходе модели (сигнал в точке Z) как можно меньше отличался от эталонного сигналя Y, либо отличался с заданной погрешность. В этом случае объект можно считать идентифицированным с указанной точностью.
Для построения графиков сигналов достаточно нажать на любую кнопку (X, Y, Z). При этом откроется окно, приведенное на рисунке 3.
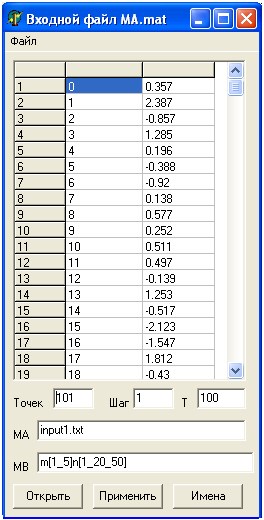
Рис. 2. Формирование входного сигнала системы
Рис. 3. Модуль построения графиков
Рассмотрим конкретный пример.
Имеется сигнал реакции замкнутой системы Y на случайный входной сигнал X для передаточной функции объекта
![]() .
.
При этом настройки регулятора имели значения: Кр=3; Ти=5; Тд=2.
Перейдем на вкладку «Настройки модели», как показано на рисунке 4, и введем произвольные значения коэффициентов передаточной, например:
![]()
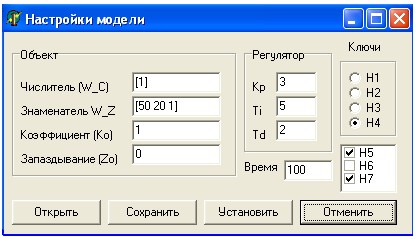
Рис. 4. Окно ввода коэффициентов объекта и регулятора
Выведем графики сигналов в точках Y и Z. Графики приведены на рисунке 5.
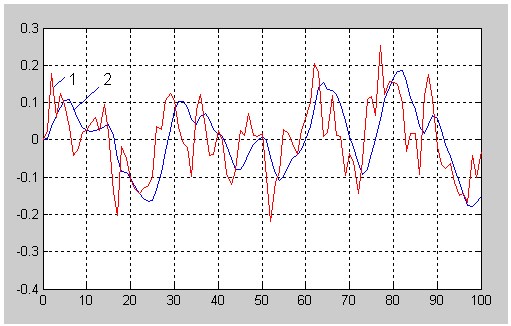
Рис. 5. Графики сигналов, в точках Y(1) и Z(2)
Перейдем на вкладку оптимизации объекта. Введем ограничения, как показано на рисунке 6 и нажмем кнопку «Пуск».
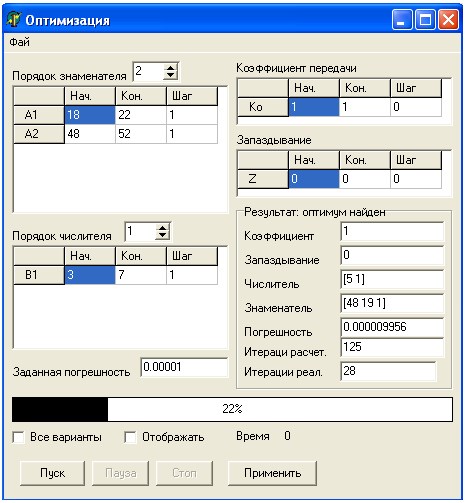
Рис. 6. Вкладка оптимизации объекта.
В результате программа найдет оптимальные значения коэффициентов передаточной функции объекта. Как видно из рисунка 6 это передаточная функция
![]()
Если теперь построить графики сигналов в точках Y и Z, то они практически совпадают, следовательно, идентификация выполнена с необходимой точностью.
При реальных расчетах все не настолько безоблачно, как показано в данном примере. Если мы заранее не знаем порядки числителя и знаменателя передаточной функции и приблизительные ограничения коэффициентов, то время расчета методом сканирования непозволительно велико.
В настоящее время выдуться работы в данной области. Написан специальный модуль для исследования поверхностей на локальные экстремумы с целью анализа возможности использования других методов оптимизации, в частности покоординатного спуска. Также ведутся работы по модификации самих методов оптимизации.
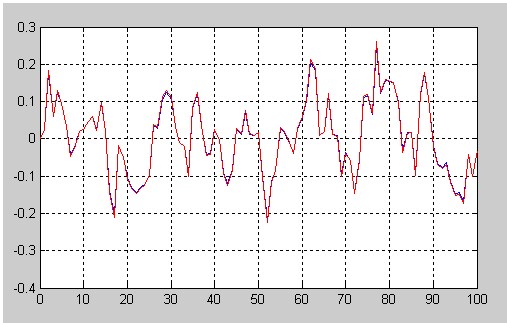
Рис. 7. Графики сигналов, в точках Y и Z
Использование данного метода идентификации не является альтернативой активному эксперименту, даже в тех случаях, когда активный эксперимент по каким-либо причинам провести затруднительно. С другой стороны, данный метод незаменим для объектов, свойства которых меняются с течением времени (так называемые нестационарные объекты).
В частности, к таким объектам можно отнести процессы восстановления и сепарации титана. Как указывают авторы [2, 3] данные процессы характеризуются нестационарностью с экзотермическим характером реакций, вызывающих значительные температурные градиенты, возникновение в процессе восстановления новых компонентов в различных агрегатных состояниях, наличие в процессе сложной совокупности явлений макрокинетики: испарения и конденсации, диффузии и конвекции и т. д.
Если рассмотреть словесный алгоритм синтеза системы управления для стационарного объекта, то он заключается в следующих пунктах:
1. Проведение активного эксперимента и получение динамики объекта.
2. Получение математического описания объекта на основе его динамических свойств (чаще всего в виде передаточной функции).
3. Расчет настроечных параметров регулятора на основе математического описания.
4. Установка полученных значений на конкретных технических средствах.
Если объект является нестационарным (с меняющимися во времени свойствами), то перечисленные пункты должна периодически выполнять сама система управления. И здесь как раз и возникают проблемы с первым пунктом нашего алгоритма. В одних случаях это невозможно, как например, в указанных процессах восстановления и сепарации титана. В других случаях это ведет к постоянным колебаниям в системе управления, что отрицательно сказывается на качестве регулирования.
В этих случаях разработанный комплекс себя вполне оправдывает, так как в большинстве случаев известны ограничения и порядки передаточных функций таких объектов, а их изменения во времени будут учитываться системой с последующей корректировкой настроечных параметров управляющих устройств.
Литература:
1. Гайдук Ф. Р., Беляев В. Е., Пьявченко Т. А. Теория автоматического управления в примерах и задачах с решениями в MATLAB, Санкт — Петербург — Москва — Краснодар. 2011. с. 463
2. Беккер В. Ф., Затонский А. В., Кирин Ю. П. Идентификация ситуаций функционирования технологических процессов в производстве губчатого титана. Журнал «Информационно-измерительные и управляющие системы». — № 9, 2009. — С. 32–36.
3. Беккер В. Ф., Затонский А. В., Кирин Ю. П. Идентификация технологических процессов в производстве губчатого титана. Проблемы управления. — № 4, 2008. — С. 23–28.
