В статье приведена упрощенная математическая модель. Представлен набор функций и параметров в среде Anylogic.
Ключевые слова: беспилотный летательный аппарат, имитационное моделирование, накопитель, функция, траектория.
The article presents a simplified mathematical model. A set of functions and parameters in the Anylogic environment is presented.
Keywords: unmanned aerial vehicle, simulation, storage device, function, trajectory.
Для повышения эффективности автоматизированных систем управления возможно использование имитационных моделей, с целью предсказания результата текущей эффективности поведения системы. Варьирование параметров в системе позволит предсказать поведение системы в различных условиях и рассчитать характеристики для повышения эффективности системы. Для быстрого построения имитационной модели существует среда имитационного моделирования AnyLogic.
Далее рассмотрен процесс создания объекта типа «БПЛА», который может быть использован в имитациях сценариев для различного тестирования БПЛА.
Для задач имитационного моделирования в объекте типа «БПЛА» должны быть учтены следующие факторы:
— Оптимизация объекта для быстродействия имитационной модели.
— Адекватность системной динамики, которая реализуется в объекте.
— Визуальное представление объекта.
Основой движения объекта типа «БПЛА», является следующая математическая модель, взятая из модели Air Defense System, разработанной компанией AnyLogic, которая находится в открытым доступе на AnyLogic Cloud [1]:
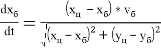
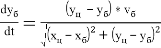
Где индекс б — беспилотный летательный аппарат, индекс ц — цель, v б — константа, x ц , y ц — элемент массива, который определяет точку цели, во время исполнения программы.
Изначальная математическая модель рассчитывалась для одной цели поэтому в работе осуществляется развитие модели для задания траектории БПЛА (Рисунок 1, 2).
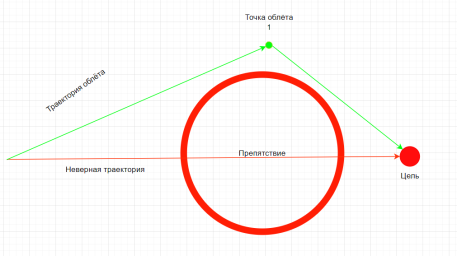
Рис. 1. Простейшая траектория облёта

Рис. 2. Эффективная траектория облёта
Для расчёта траектории задаётся массив точек цели. Заполнение массива осуществляется с помощью функции перерасчёта траектории (Рисунок 3).
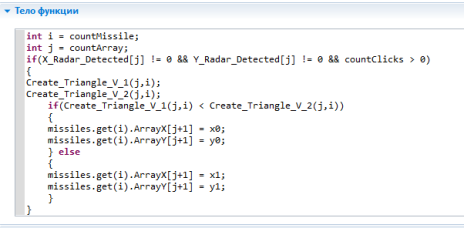
Рис. 3. Функция перерасчёта траектории
Для успешной реализации структурной модели объекта типа «БПЛА» представлен минимум параметров и функций представленных на рисунке 4.
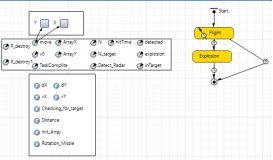
Рис. 4. Структурная модель объекта типа «БПЛА»
Для работы данного объекта необходимо задать следующие параметры:
— Параметр move — отвечает за доступ к запуску объекта типа БПЛА по цели;
— Параметр v0 — отвечает за абсолютное значение вектора скорости;
— Параметр N_target — отвечает за выбор конечной цели;
— Параметр N — отвечает за текущую цель в массиве целей;
— Параметр explosion — активируется при достижении ракетой конечной цели (дистанция равная 0.01);
— Параметр P_destroy — определяет, попадает ли БПЛА по цели. Значение данного параметра характеризует потерю сигнала крылатой ракеты со спутником, который обеспечивает наведение на цель;
— Параметр P_destroy1 — забирает текущее значение на интервале [0;1] и даёт информацию объекту типа «БПЛА», о текущем состоянии ограничителя системы.
— Параметр ArrayX и ArrayY — массивы, в которых хранятся координаты точек для определения траектории движения объекта типа «БПЛА»;
— Параметр hitTime — определяет модельное время попадания объекта типа «БПЛА» по конечной цели.
— Параметр TaskComplite — информирует модель об уничтожении конечной цели, которая задана для текущего объекта типа «БПЛА».
Набор данных параметров позволяет структурной модели реагировать на события в системе, что позволяет задать объекту адекватное поведение, в ходе выполнения модели.
Расчёт дифференциальный уравнений (1,2), исполняется в следующих блоках (Рисунок 5, 6), каждый блок обрабатывает дифференциальное уравнение с помощью численной схемы, построенной на методе Рунге — Кутты 4-го порядка, данный метод является одним из двух доступных методов для реализации численной схемы в среде AnyLogic и выбран так как является более точным, чем метод Эйлера.
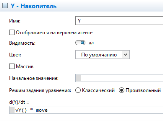
Рис. 5. Свойства накопителя Y в объекте типа «БПЛА»
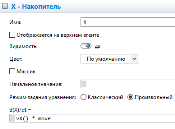
Рис. 6. Свойства накопителя X в объекте типа «БПЛА»
Набор данных параметров позволяет структурной модели реагировать на события в системе, что позволяет задать объекту адекватное поведение, в ходе выполнения модели.
Предложенные уравнения в модели Air Defense System, проходят проверку на адекватность и могут использоваться для реализации передвижения объектов к цели.
Полученная простейшая модель может быть интегрирована в имитационную модель как отдельный объект.
Литература:
- AnyLogic cloud // [сайт] — 2018 URL: https://cloud.anylogic.com/models (дата обращения: 15.05.2024).

