В статье авторы исследуют, как помочь воздушному транспорту совершать наземное перемещение, не используя силу двигателей и не расходуя топливо. В качестве варианта предлагается использование беспилотного многофункционального электротягача, обладающего сравнительно простой конструкцией и высокой грузоподъёмностью.
Ключевые слова: электротягач, электродвигатели.
Введение
В современном мире крупные транспортные узлы, такие как аэропорты, являются катализаторами огромного потока пассажиров и воздушных судов. Однако процесс обслуживания и перемещения воздушных судов по территории аэропорта сопряжен с рядом негативных последствий. Традиционные воздушные суда, используют собственные авиадвигатели для наземного передвижения, сжигая определенное количество дорогостоящего топлива, снижая ресурс самих двигателей, выбрасывая в атмосферу большое количество выхлопных газов и увеличивая шумовой фон в районе аэропорта.
Вследствие этого, аэропорты вынуждены нести огромные расходы на оплату труда персонала, обеспечивающего логистику и обслуживание своей инфраструктуры, а также на поддержание технической готовности транспортных средств и закупку топлива и смазочных материалов [1].
Внедрение концепции беспилотного многофункционального электротягача (БМЭ) представляет собой потенциальное решение для улучшения всех указанных аспектов. Эта инновационная технология не только минимизирует расходы на топливо и обслуживание, но и снизит негативное воздействие на окружающую среду, благодаря использованию электрического тягового привода. Такой подход способствует снижению шумового фона и выбросов вредных веществ, что сделает аэропорт более экологически устойчивым и экономически эффективным. В данном контексте, рассмотрение внедрения БМЭ представляется не только актуальной, но и стратегически важной инициативой для современных аэропортов, позволяющей повысить их конкурентоспособность и улучшить качество обслуживания [2].
К преимуществам БМЭ относятся:
- Снижение шумового фона. Использование БМЭ позволит существенно снизить уровень шума в аэропортовской зоне, что приведет к созданию более комфортной и тихой обстановки для пассажиров, работников аэропорта и жителей окрестных населенных пунктов.
- Сокращение вредных выбросов в районе аэропорта. Одним из главных преимуществ БМЭ является его экологичность. За счёт использования электрического тягового привода данный транспорт не производит вредных выбросов в атмосферу, что способствует улучшению качества воздуха в районе аэропорта и снижает экологическую нагрузку на окружающую среду.
- Улучшение безопасности наземных операций, исключение человеческого фактора. Внедрение БМЭ также приводит к повышению уровня безопасности наземных операций в аэропорту. Исключение человеческого фактора из процесса управления позволяет избежать ошибок, связанных с усталостью персонала, неправильном принятием решений и т. д. Это способствует уменьшению вероятности возникновения аварий и инцидентов на наземных дорогах аэропорта.
- Снижение издержек и расходов на наземные операции. БМЭ позволяют снизить издержки и расходы на наземные операции благодаря ряду факторов, включая более эффективное использование ресурсов, уменьшение затрат на топливо и обслуживание, а также сокращение потребности в персонале для управления и обслуживания транспортных средств. Это способствует повышению экономической эффективности деятельности аэропорта и уменьшению финансовой нагрузки на его бюджетные ресурсы.
Существующие аналоги
На мировом рынке существует незначительное количество аналогов беспилотных авиационных тягачей. Примером таких инновационных разработок может служить компания Mototok, которая известна своими тягачами TWIN (рис. 1). Эти устройства отличаются сложной технической реализацией, но при этом (в зависимости от модели) обладают грузоподъёмностью до 50 тонн.

Рис. 1. Тягач TWIN от фирмы Mototok
Еще одним ведущим производителем подобных технологий является компания OSRAM из Германии. Модель тягача I-Pac 6000 XL, обладающего грузоподъёмностью до 15 тонн, показана на рис. 2.
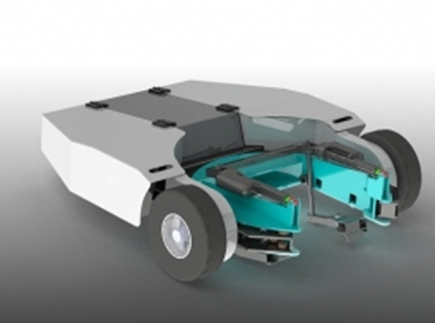
Рис. 2. Тягач I-Pac 6000 XL
Однако стоит отметить, что количество подобных производителей остается ограниченным на мировом рынке, что подчеркивает значимость и востребованность разработок в данной области и демонстрирует перспективы роста и развития данного сегмента промышленности.
Концептуальная модель БМЭ
В отличие от моделей немецких производителей, предлагаемый БМЭ представляет собой более крупное и функциональное решение. Вместе с тем, его применение не ограничивается только транспортировкой вертолётов или частных воздушных судов. Благодаря большим габаритам и расширенной функциональности, он способен заменить стандартные авиационные тягачи, охватывая широкий спектр наземных операций в аэропорту.
Модель БМЭ обладает модульной конструкцией, что позволяет адаптировать его к различным сценариям наземных операций. Он может использоваться для буксировки воздушных судов различных типов и размеров, а также для буксировки багажа и доставки грузов по территории аэропорта. Кроме того, он способен осуществлять транспортировку пассажирских модулей от терминала к воздушным судам и обратно, что повышает эффективность обслуживания пассажиров.
Благодаря электрической тяге и использованию четырех мощных электродвигателей, БМЭ обеспечивает высокую производительность и эффективность. Электроэнергия, в отличие от традиционных видов топлива, обладает более низкой стоимостью, что способствует снижению издержек на обслуживание логистики в аэропорту. Кроме того, использование электротяги делает тягач экологически более чистым, уменьшая выбросы вредных веществ и улучшая качество воздуха в зоне аэропорта.
Управление БМЭ осуществляется с помощью полностью автономной системы, которая может работать как удаленно, под наблюдением специально обученного персонала, так и с использованием специального пульта управления для точной и быстрой работы. Это обеспечивает оптимальную эффективность и точность в выполнении задач.
Зарядка и техническое обслуживание БМЭ проводятся в специально оборудованных зонах, обеспечивающих быструю подзарядку аккумуляторов и надежную проверку работоспособности. Эти места обладают высокой энергетической мощностью и предоставляют необходимые ресурсы для бесперебойной работы тягача на протяжении всего его рабочего времени.
На рис. 3 проиллюстрирована 3D-модель БМЭ, а в табл. 1 приведены основные характеристики БМЭ [3].
|
|
|
|
|
|
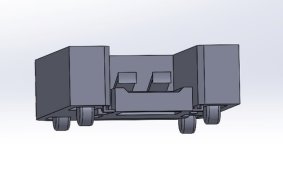
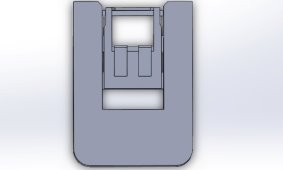
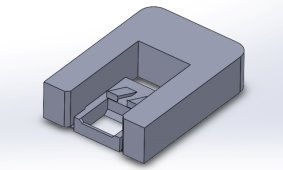
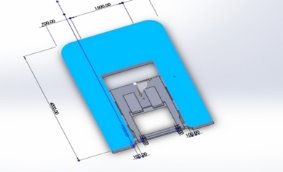
Рис. 3. 3D-модель тягача
Таблица 1
Основные характеристики БМЭ
|
Характеристики |
Значение |
|
4 электрических двигателя постоянного тока вмонтированные в колёса |
|
20 кВт |
|
Рамная конструкция из высокопрочных материалов, со сменным узлом для различных логистических операций |
|
20 км/ч (5.6 м/с) |
|
~0.67 ч (стоянка тягачей — операции с воздушным судном — стоянка тягачей) |
|
Блок свинцово-кислотных аккумуляторов: 16 штук. Общая масса аккумуляторного блока ~900 кг (при весе одной батареи 55 кг). Ёмкость: 225 А·ч. Напряжение аккумулятора: 12 В |
|
до 45 т |
|
10–15 км |
|
Беспилотный, роботизированный |
|
Высота: 1500 мм; ширина: 2900 мм; длина: 4000 мм |
|
5 т |
Вывод
На текущем этапе разработки БМЭ проведены работы по определению концепции (облика) данного аппарата, включившие в себя изучение и анализ источников информации о структуре работы авиационных тягачей, работе и устройстве современных аэропортов, их потребностей в части использования БМЭ.
В настоящее время предлагаемый БМЭ находится на стадии разработки, однако у него есть перспективы. В процессе формирования концепции разработан 3D-модель БМЭ со всеми габаритами, произведены расчеты, которые показывают технические возможности модели. На наш взгляд найден более усовершенствованный и эргономичный способ транспортировки воздушных суден по взлётно-посадочной полосе, чем существующие варианты.
Литература:
- Павлов С. А. Буксировка воздушных судов: учеб. пособие / С. А. Павлов, В. Б. Сердобов. — М.: МАДИ, 2018. — 104 с.
- Зацепин В. В., Лиховидов Д. В., Дьяков Д. Е., Мачехин Р. А. Проблемы эксплуатации аэродромных буксировщиков и пути их решения // Современные проблемы науки и образования. — 2014. — № 1.;
- URL: https://science-education.ru/ru/article/view?id=12123 (дата обращения: 08.05.2024).
- Барбашин С. В., Великанов А. В., Пурусов Ю. М. Основы теории и расчёта аэродромных колёсных тягачей: Учебное пособие. ВВВАИУ. — Воронеж, 2000. — 119 с.

